 На Центральной выставке НТТМ-78, посвященной XVIII съезду ВЛКСМ и 60-летию комсомола, большой популярностью у посетителей пользовался раздел «Эврика», в котором демонстрировалась необычная транспортная техника, созданная самодеятельными конструкторами. Колесно-гусеничный вездеход «Полярник», построенный электромонтером из Рыбинска Валерием Медведевым, был одной из тех машин, которые прибыли в Москву на ВДНХ СССР «своим ходом». Да, это был не макет, а живая рабочая машина, образно выражаясь, «снятая с эксплуатации» в хозяйстве своего создателя. Летом и зимой, в жару и стужу, на охоту и рыбалку, просто за город с семьей или по неотложным делам ездит на этой оригинальной машине ее конструктор. Уже более пятидесяти тысяч километров прошел «Полярник». Пробег солидный даже для серийных машин.
На Центральной выставке НТТМ-78, посвященной XVIII съезду ВЛКСМ и 60-летию комсомола, большой популярностью у посетителей пользовался раздел «Эврика», в котором демонстрировалась необычная транспортная техника, созданная самодеятельными конструкторами. Колесно-гусеничный вездеход «Полярник», построенный электромонтером из Рыбинска Валерием Медведевым, был одной из тех машин, которые прибыли в Москву на ВДНХ СССР «своим ходом». Да, это был не макет, а живая рабочая машина, образно выражаясь, «снятая с эксплуатации» в хозяйстве своего создателя. Летом и зимой, в жару и стужу, на охоту и рыбалку, просто за город с семьей или по неотложным делам ездит на этой оригинальной машине ее конструктор. Уже более пятидесяти тысяч километров прошел «Полярник». Пробег солидный даже для серийных машин.
Первое время местные работники Госавтоинспекции присматривались к вездеходу Медведева недоверчиво. Трактор не трактор, самолет не самолет. Хорошо «бегает», вписывается в поток автотранспорта на улицах, не вступает в противоречия с правилами дорожного движения. Спустя немного времени все привыкли к «Полярнику». Он стал своего рода местной достопримечательностью, если не сказать — гордостью рыбинских «самодепыциков». Из далеких северных краев начали приходить письма, приезжать «ходоки» — всем не терпелось получить чертежи или хотя бы фотографии этого удивительного транспортного средства. Получает такую корреспонденцию и редакция нашего журнала. Поэтому сегодня, когда позади выставка НТТМ-78, где сотни тысяч посетителей могли видеть «Полярник» и лауреатом которой стал Валерий Медведев, мы знакомим с его машиной.
Создание действительно вездеходной машины — очень заманчивая идея! Я вынашивал ее несколько лет: около года ушло на проектирование и три года на постройку. Летом работал во дворе, в пристройке, зимой в квартире. Хорошо, что домашние не очень ворчали, даже помогали иногда и поддерживали меня морально. Иначе я никогда бы не закончил эту работу!
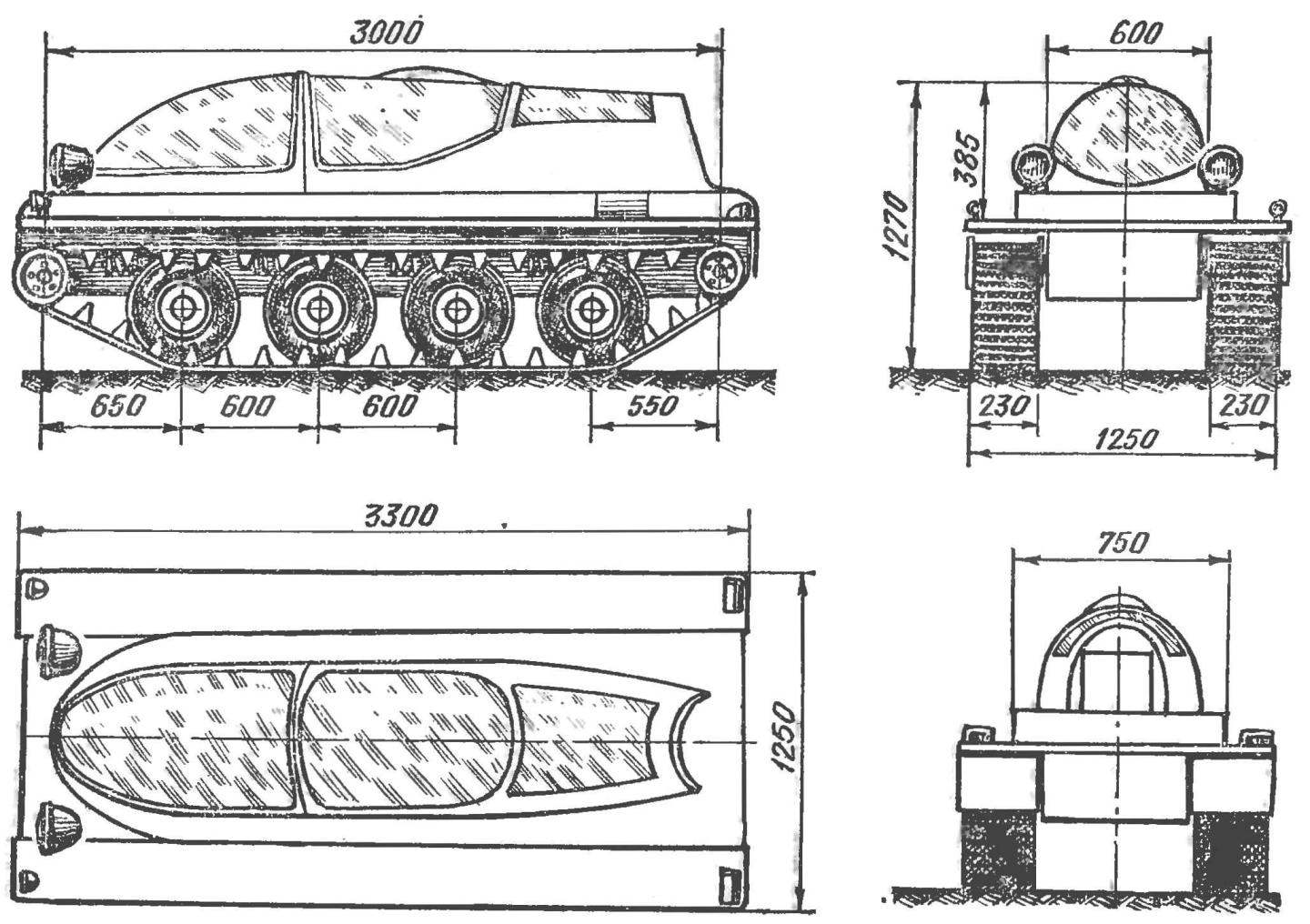
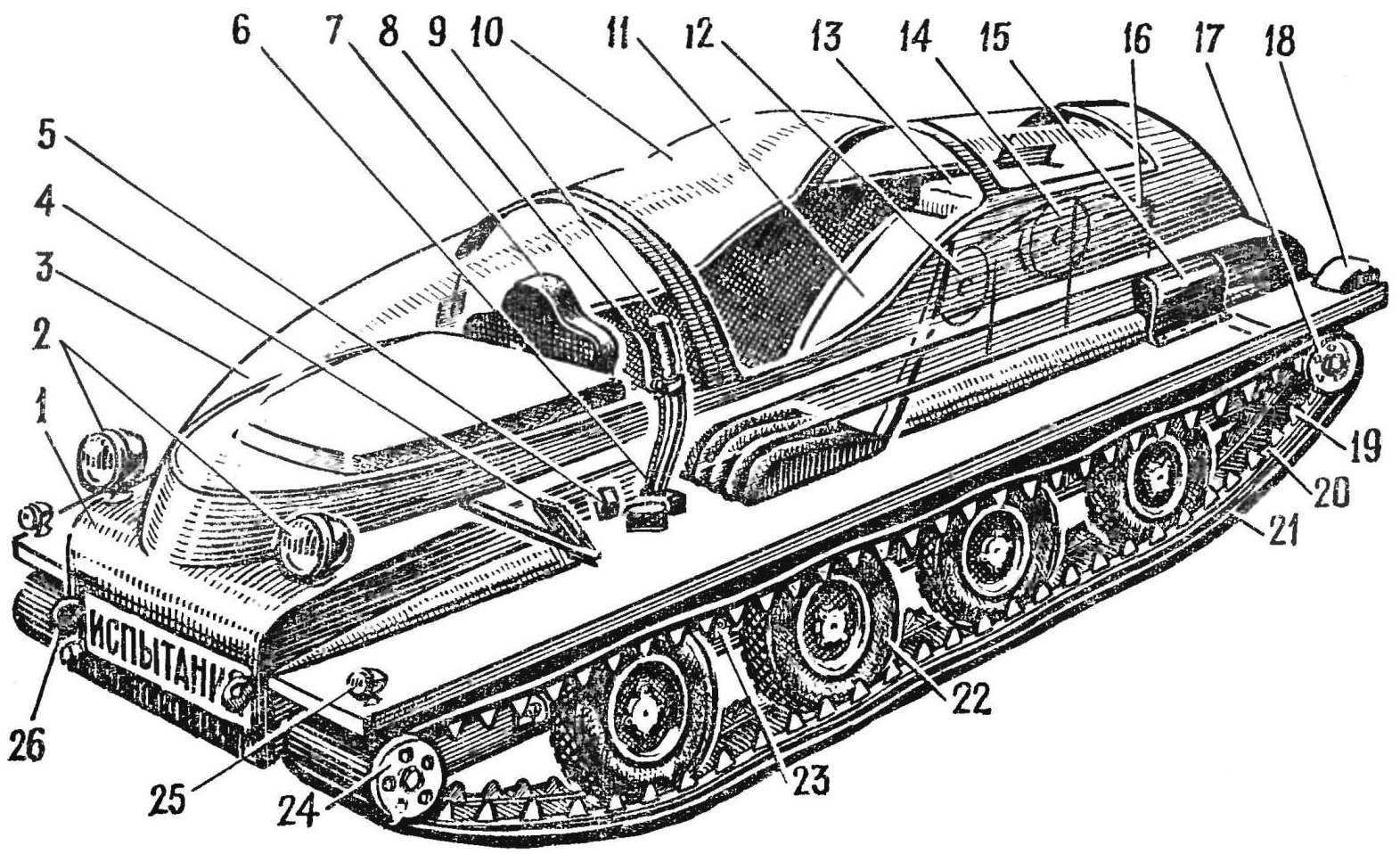
Рис. 1. Микровездеход «Полярник».
За основу мною взята колесно-гусеничная ходовая часть с двумя бортовыми рядами пневматических колес с шинами 4Х10 (от мотороллера), по 4 колеса в каждом ряду. Колеса обтянуты гусеницами с двумя рядами направляющих клыков, по 110 штук на каждой.
В качестве привода первоначально был установлен двигатель УД-4 мощностью 12 л. с. с самодельной трансмиссией. В дальнейшем я заменил его двигателем от мотонарт «Буран» мощностью 25 л. с. при 3600 об мин в комбинации с клиноременным вариатором. Общий вид вездехода «Полярник» показан на рисунке 2, схема в трех проекциях и основные размеры — на рисунке 1.
Рама вездехода ферменного типа изготовлена из дюралюминиевого уголка и на отдельных участках подкреплена вставками из буковых брусков.
Обшивка корпуса из мебельной фанеры оклеена в один слой стеклотканью АСТТ(б) на эпоксидной смоле. Нижняя часть корпуса герметичная, верхняя состоит из двух половин, что дает возможность расстыковать ее за 10—15 мин и получить беспрепятственный доступ к любому узлу и агрегату.