 В конструкторском деле, как и в любом другом виде творчества, человеку часто приходится идти непроторенным путем. Путь этот вceгдa труден; он под силу только тому, кто в совершенстве владеет способами, методами и средствами конструкторского творчества.
В конструкторском деле, как и в любом другом виде творчества, человеку часто приходится идти непроторенным путем. Путь этот вceгдa труден; он под силу только тому, кто в совершенстве владеет способами, методами и средствами конструкторского творчества.
Как достигнуть этого совершенства?
Наш раздел «Введение в конструирование» поможет вам сделать первые шаги на пути созидания, познакомит с основными приемами конструкторской работы. Из номеров 9,11 и 12 1974 года вы узнали, как разрабатываются общие технические требования, как предварительно рассчитываются основные параметры технического устройства. Сегодня паша тема — выбор способа передачи усилия от двигателя к движителю. Итак…
Теперь нам предстоит разработать конструкцию механизма, который позволил бы передавать вращательное движение вала двигателя на колесо. При этом скорости вращения должны соответствовать каждому из рассмотренных выше вариантов транспортного устройства.
Начнем с простого примера. Требуется привести в движение колесо с помощью электродвигателя, но без промежуточных механизмов. В этом случае достаточно соединить их валы между собой: колесо будет вращаться с той же скоростью, что и ротор электродвигателя. Скорость вращения можно будет регулировать изменением напряжения тока. Но с уменьшением числа оборотов непременно будет уменьшаться и мощность двигателя на валу.
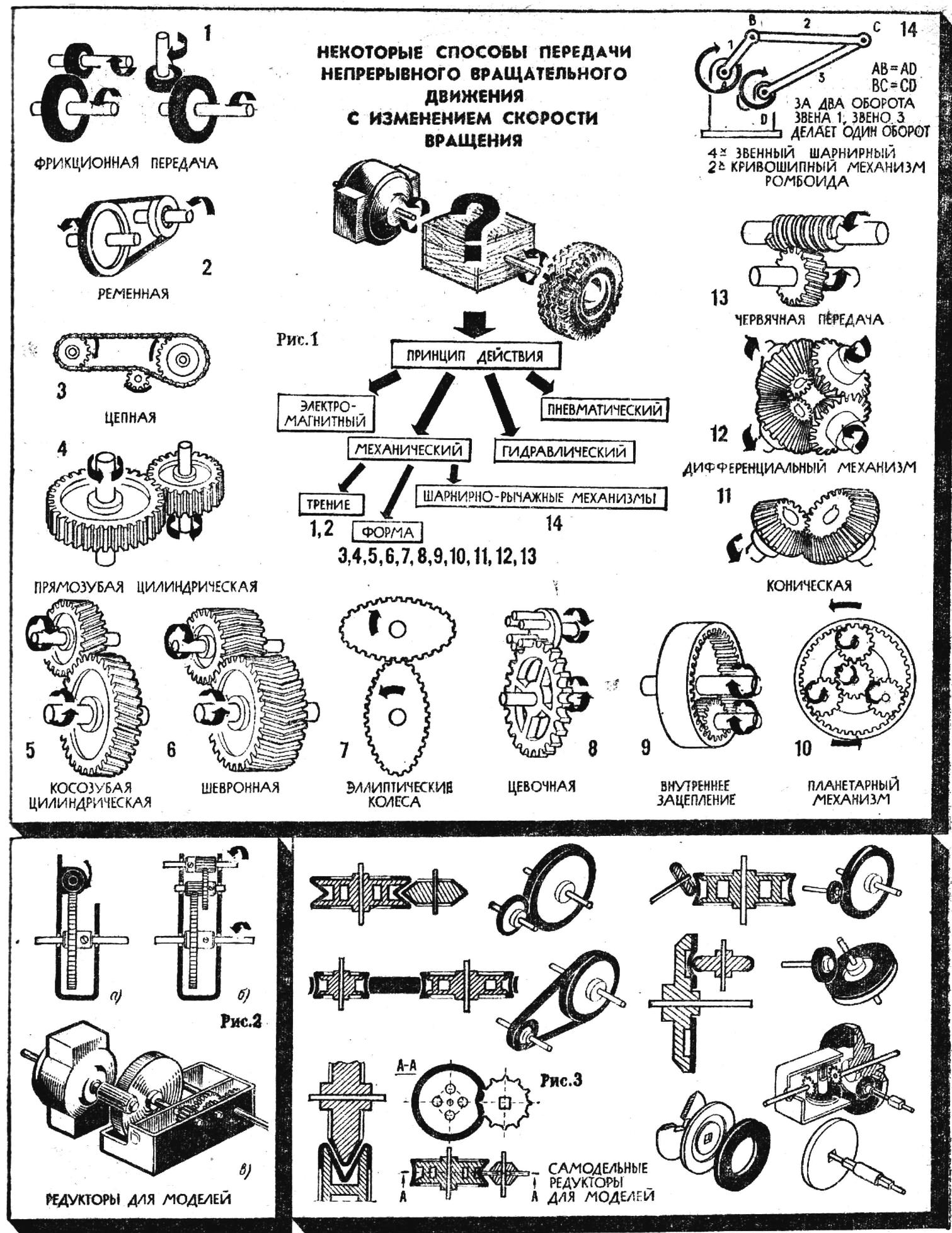
Чтобы получить уменьшение скорости вращения без снижения мощности электродвигателя, приходится применять различные передающие механизмы. Таких устройств, где использованы различные принципы передачи — механический, электромагнитный, гидравлический и другие, — существует сейчас великое множество.
Некоторые из них показаны на рисунке 1. Основным расчетным параметром в этих устройствах является передаточное число I — отношение скорости вращения ведущего колеса n1 к скорости вращения ведомого колеса n2:
i=n1/n2
При передаче вращения трением (фрикционная передача) это отношение будет равно:
i = n1/n2=D2/D1,
где D2, — диаметр ведомого колеса, а D1 — ведущего.
В передачах с использованием зубчатых колес (шестерен):
i = n1/n2=Z2/Z1,
где Z2 — количество зубьев ведомого колеса, Z1 — ведущего.
Из этого соотношения следует, что для уменьшения (увеличения) числа оборотов ведомого колеса в несколько раз необходимо соответственно во столько же раз увеличить (уменьшить) его диаметр, а у шестерен — число зубьев.
Если в передаче используется одна пара колес, она называется одноступенчатой; две пары — двухступенчатой и т. д. В многоступенчатых передачах iобщ = i1·i2·i3…in, где i1, i2, i3 и т. д.— передаточные числа отдельных ступеней.
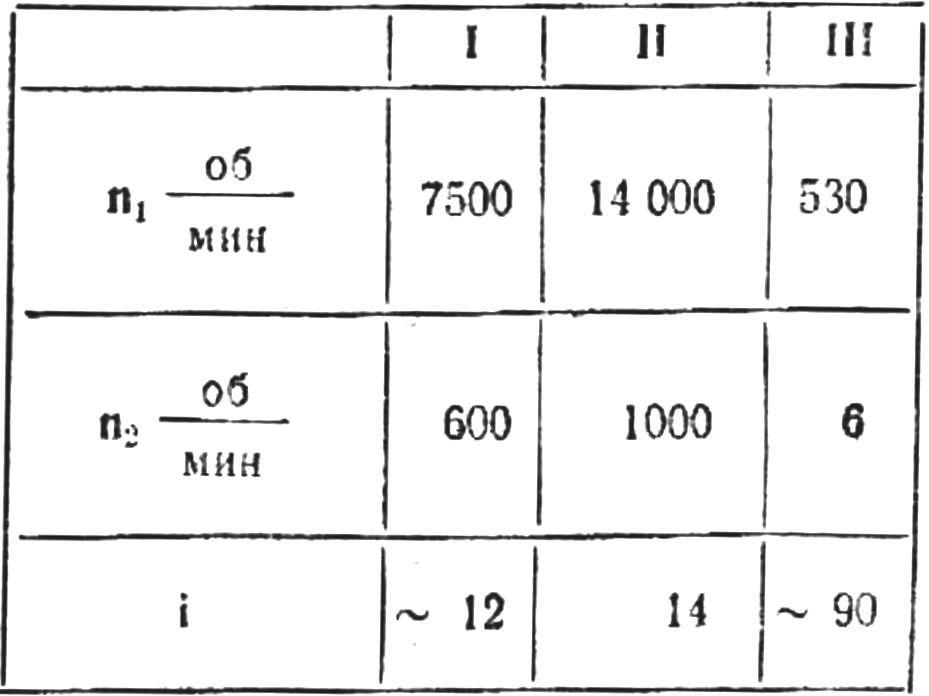
Теперь определим число I для передающих механизмов применительно к трем рассматриваемым нами вариантам технических устройств, а полученные результаты оформим в виде таблицы.
Назовем дополнительные требования к работе передающих механизмов применительно к рассматриваемым техническим устройствам.
В первом варианте необходимо, чтобы передача движения на колесо прекращалась практически одновременно с остановкой двигателя.
Этому условию наиболее полно будет отвечать применение в передающем механизме червячной передачи. Для нее I определяется как отношение числа зубьев червячного колеса Z2 к числу заходов (ниток) червяка то есть
i = Z2/Z1.
При i=12 целесообразно использовать червяк с числом заходов от 1 до 6.
Возьмем число заходов равным 1 (такой червяк можно подобрать в наборе типа «Конструктор») и определим число зубьев червячного колеса, необходимое для обеспечения заданной скорости вращения колеса.
По формуле
i = n1/n2=Z2/Z1
находим:
Z2 = Z1·n1/n2=1·7500/600
Таким образом, передающий механизм, обеспечивающий заданную в варианте 1 скорость вращения колеса, может состоять из одноступенчатой червячной передачи с однозаходным червяком и червячного колеса с числом зубьев, равным 12 (рис. 2, а).
В варианте II (работа на пришкольном участке) прекращение движения может быть более плавным.
i = i1·i2=(Z2/Z1)·(Z4/Z3)
В этом случае в передающем механизме можно использовать цилиндрические шестерни с прямым зубом. Поскольку i = 14, то целесообразно использовать две пары шестерен, то есть
i = i1·i2=(Z2/Z1)·(Z4/Z3).
но из таблицы нам известно, что
i =n1/n2=14000/100=14/1.
Теперь мы можем подобрать передаточные числа ступеней:
i = (Z2/Z1)·(Z4/Z3)=14/1=2/1·7/1.
Но количество зубьев у шестерни не может быть меньше 6, поэтому найденное соотношение необходимо увеличить в 6 раз:
i = (Z2/Z1)·(Z4/Z3) = (2/1·7/1)·6=12/6·42/6.
Следовательно, Z1=6, Z2=12, Z3=6, Z4 = 42 (рис. 2, б).
Передающий механизм модели планетохода (III вариант) должен обеспечить передачу с i = 90, следовательно, можно использовать многоступенчатый шесте- ] репчатый редуктор или комбинированный передающий механизм, включающий в себя и другие способы передачи, например червячную, фрикционную.
Можно попробовать подобрать готовый редуктор из механизмов, которые выпускает промышленность для игрушек. Наиболее приемлемым из них может быть редуктор для игрушки с инерционным двигателем. Диаметр маховика в этом механизме равен 40 мм, а шестерни имеют число зубьев соответственно Z1=6; Z2=18; Z3=6; Z4= 18.
У этого редуктора на первой ступени передачи удобно использовать силы трепня, а на последующих оставить прямозубые цилиндрические шестерни.
Па вал двигателя в этом случае необходимо одеть резиновую трубку так, Чтобы толщина вала с трубкой была примерно равной 4 мм (рис. 2 в). Тага я передача обеспечивает заданную скорость движения модели. Для повышения надежности и маневренности движения модели (развороты вправо, влево, кругом) будем использовать два двигателя и два редуктора, по одному с каждой стороны.
В наших моделях мы отказались от использования соединительных муфт. Ведущее колесо (шестерня, червяк, шкив) первой ступени крепится на валу двигателя, а ведомая шестерня последней ступени редуктора крепится на валу колеса.
Подшипники и опоры для осей и валов могут быть стандартными или самодельными. Эти вопросы применительно к нашим моделям уточняются при решении технологических задач на этапе изготовления и сборки механизма.
На этом разработка конструкции передающего механизма может быть окончена. Но как быть, если готовых шестерен нет, а изготовить их в условиях кружка часто невозможно? На рисунке 3 показано несколько разновидностей самодельных передающих механизмов. Любая из таких передач работает достаточно надежно, даже если допустить небольшие неточности в изготовлении. Попробуйте применить эти идеи на практике. Предлагаем вам продолжить самостоятельную разработку самоходных транспортных тележек (см. «Моделист-конструктор», 1974, № 11). Определите передающие механизмы для этих устройств.
Литература:
Справочник для изобретателя и рационализатора. М.—Свердловск, Машгиз, 1963.
Артоболевский И. И. Механизмы в современной технике. М., «Наука», 1971.
Ковалев Н. А. Теория механизмов и деталей машин. М., «Высшая школа», 1974.
Сборник задач и примеров расчета по курсу деталей машин. М., «Машиностроение», 1974.
Детская энциклопедия, т. 5, изд. 2. М., «Просвещение», 1965.
Рекомендуем почитать
 МИНИ-КАМБУЗ КАТЕРА
МИНИ-КАМБУЗ КАТЕРА
В небольших каютных катерах и яхтах на учете каждый квадратный дециметр площади. Выделить специальное место под камбуз — проблема. Поэтому для приготовления пищи каждый раз надо... В ПОМОЩЬ САЛЬНИКУ
В ПОМОЩЬ САЛЬНИКУ
В коммунальном хозяйстве широко используются запорные вентили — они стоят на всех водопроводных вводах в дом и каждую квартиру. Раньше эти устройства делали из черных металлов:...
