 В наши дни человек все стремительней проникает в самые глухие уголки земли, где не только нет никаких дорог, но и нога исследователя никогда не ступала. Как ни удивительно, за свою многовековую историю мы не успехи освоить большую часть суши. А таит она в себе несметные богатства, которые природа скрывает в непроходимой тайге, в джунглях, неприступных скалах.
В наши дни человек все стремительней проникает в самые глухие уголки земли, где не только нет никаких дорог, но и нога исследователя никогда не ступала. Как ни удивительно, за свою многовековую историю мы не успехи освоить большую часть суши. А таит она в себе несметные богатства, которые природа скрывает в непроходимой тайге, в джунглях, неприступных скалах.
Но пробраться в большинство из таких районов не под силу ни одному из существующих вездеходов. И остается человеку полагаться на собственные ноги или на помощь древних четвероногих помощников — лошадей, верблюдов, быков. Где уж тут обычному колесу сравниться с живыми шагающими «механизмами»!
Однако не здесь ли таится ответ на вопрос о будущем вездеходного транспорта! Ведь заманчиво построить специальные шагающие автомобили-вездеходы, которые по проходимости могли соперничать с человеком или животным. Достаточно вспомнить хотя бы горного козла с его захватывающими дух прыжками над пропастью или «вездепролазность» какого-нибудь жучка. Вот бы изучить этому и машину.
Фантазия! Нет. Реальные «ходячие» механизмы уже сегодня делают первые, пусть еще робкие, шаги.
Природа подсказала человеку многие гениальные изобретения. И лучший пример — появление шагающих машин. Правда, изобретатели прошлого не продвинулись дальше проектов или примитивных моделей. Увы, таков был тогда уровень техники. Дело в том, что, помимо ходового аппарата, живые существа наделены еще и разумом, что и позволяет им легко проходить там, где вязнет машина, выбирать место, куда поставить ногу, соизмерять длину и высоту шага. Вот почему создание «разумных» механических копий животных или человека стало возможным только с появлением и развитием таких областей науки и техники, как бионика и электроника, кибернетика и гидравлика высоких давлений.
Самое главное преимущество шагающих систем — удивительная приспособляемость их к любым неровностям пути, проходимость практически по любой местности, высокая маневренность, что недостижимо ни для одного из других видов вездеходных движителей.
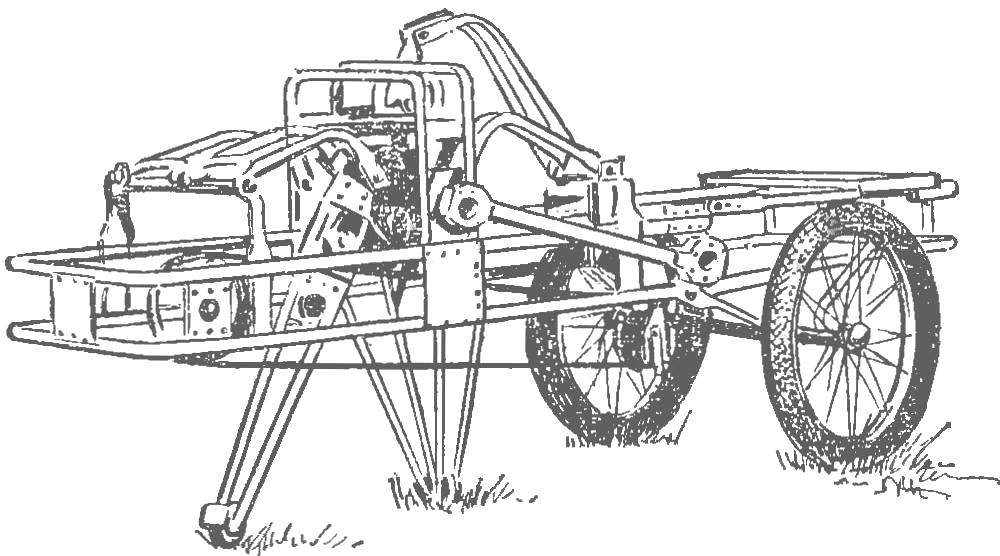
Рис. 1. Тележка c пытающим движителем И. Лягуши.
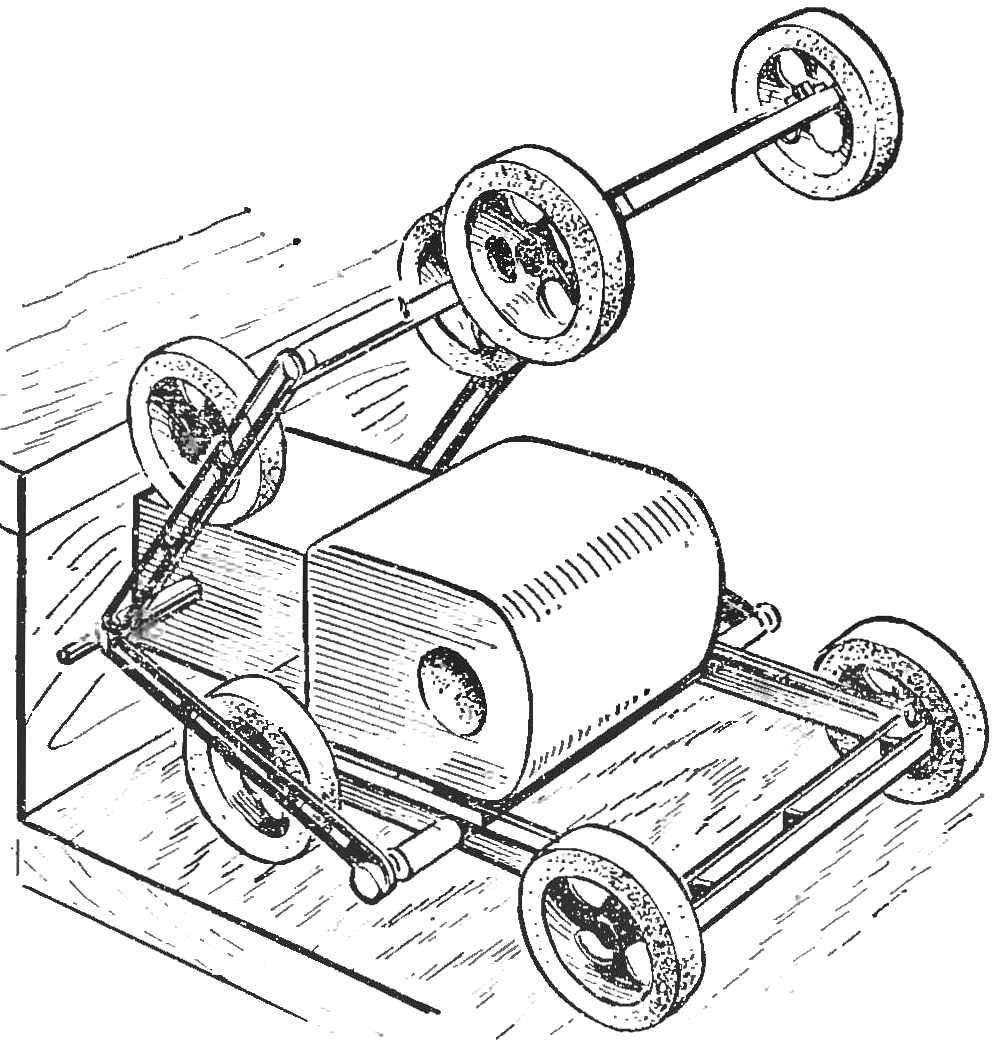
Рис. 2. Колесно-шагающий механизм.
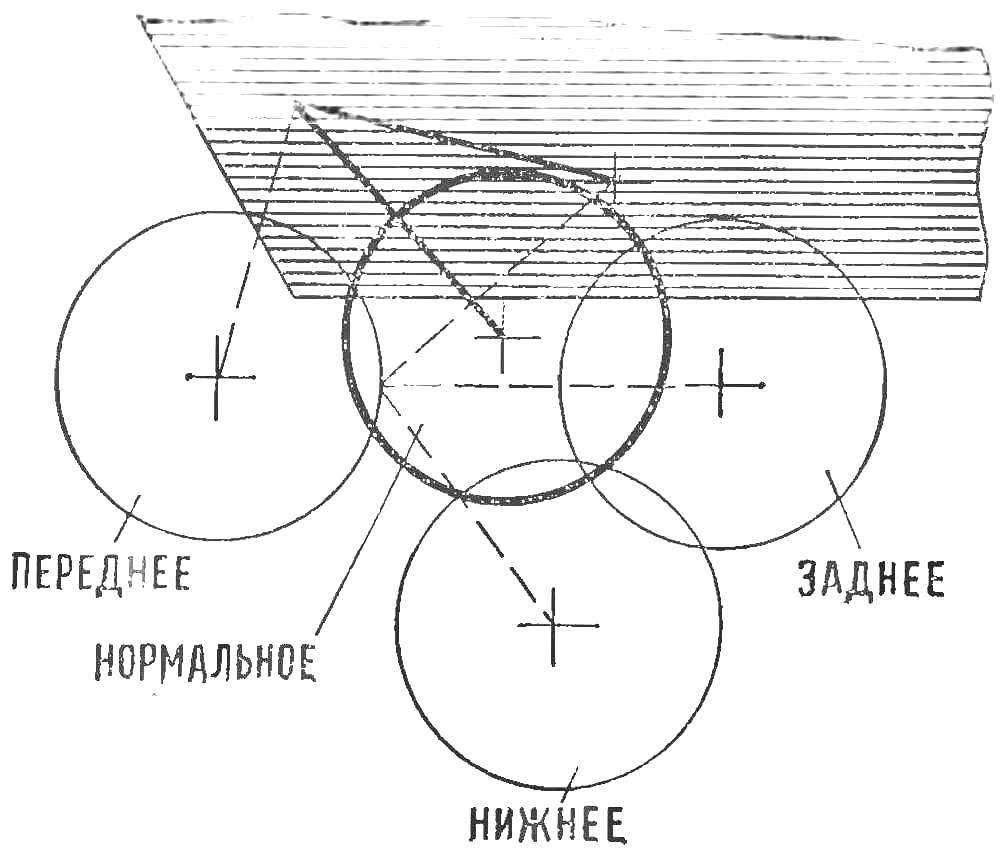
Рис. 3. Принцип установки ведущих колес автомобиля-вездехода на концах продольно качающихся балансиров.
Но и живой шагающий «механизм» небезупречен с точки зрения требований современного транспорта. Экономичность его невыезда, и особенно на повышенных скоростях. Достаточно вспомнить, что каждый шаг сопровождается ритмичными ускорениями, замедлениями и остановками ноги в момент соприкосновения ее с землей. Если у обычных транспортных средств при движении положение центра тяжести не изменяется, то у многих шагающих механизмов он с каждым шагом колеблется вверх-вниз, корпус движется с ускорениями и замедлениями, на что непроизводительно расходуется драгоценная энергия. Ну и, конечно, шагающие движители значительно сложнее и дороже простого колеса. Эти противоречия, их преодоление — тема разработок многих конструкторов.
Долог и труден путь к шагающим автомобилям. Они развиваются по двум основным направлениям: комбинированные или переходные модели вездеходов, у которая используются только какие-либо элементы шагания, и чисто шагающие машины. Первая группа, по идее конструкторов, должна объединять в себе все лучшие качества и колесных, и гусеничных, и шагающих машин.
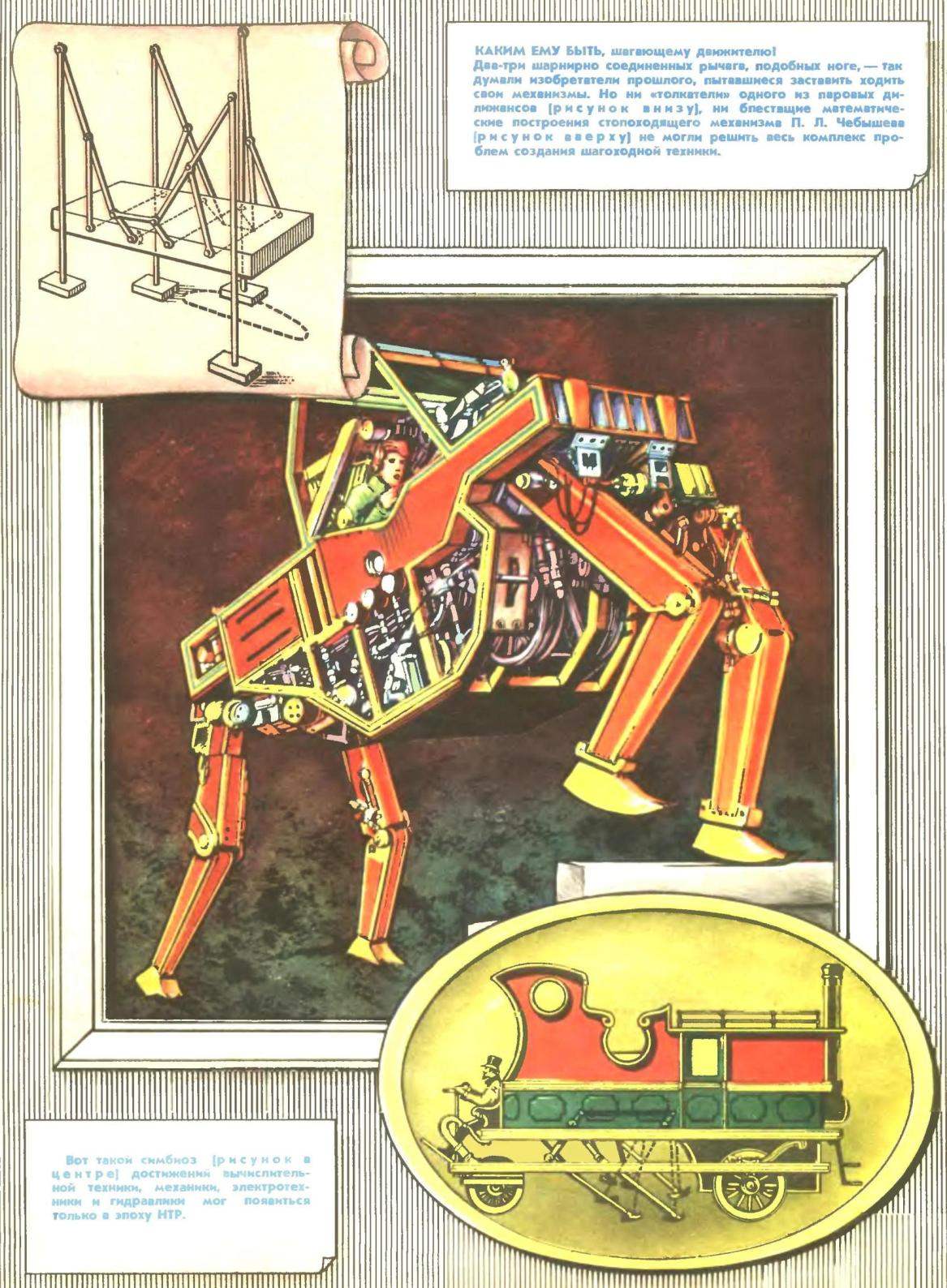
Первое в мире применение шагающего механизма на самоходном экипаже отнюдь не было связано с описанными его преимуществами. В 1824 году англичанин Давид Гордон построил трехколесный паровой дилижанс (см. вкладку) со специальными «ногами». Изобретатель почему-то не верил в возможности колесного движителя, поэтому и соорудил сложнейшую систему из шести «ног», с приводом от паровой машины. При поочередном соприкосновении с дорогой «ноги» отталкивались от нее, сообщая экипажу поступательное движение.
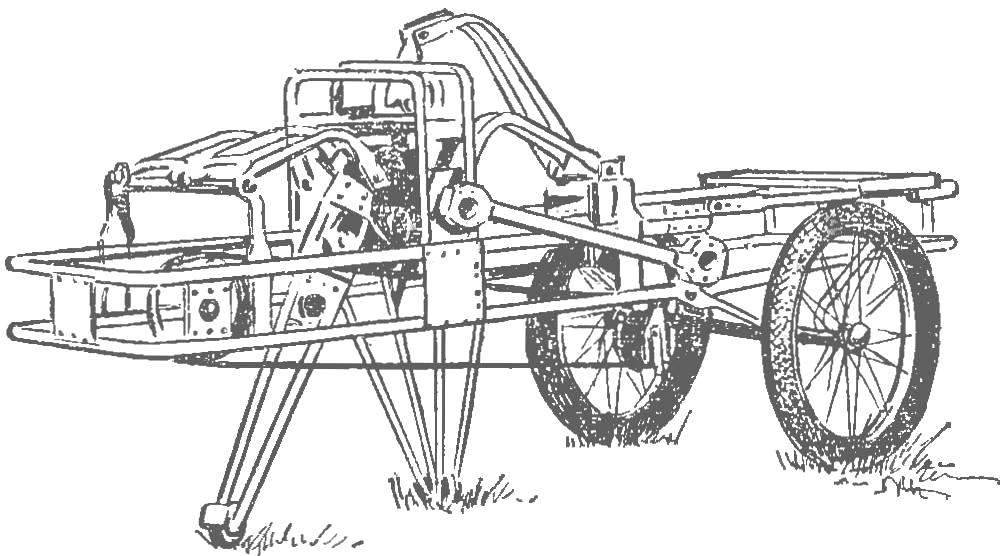
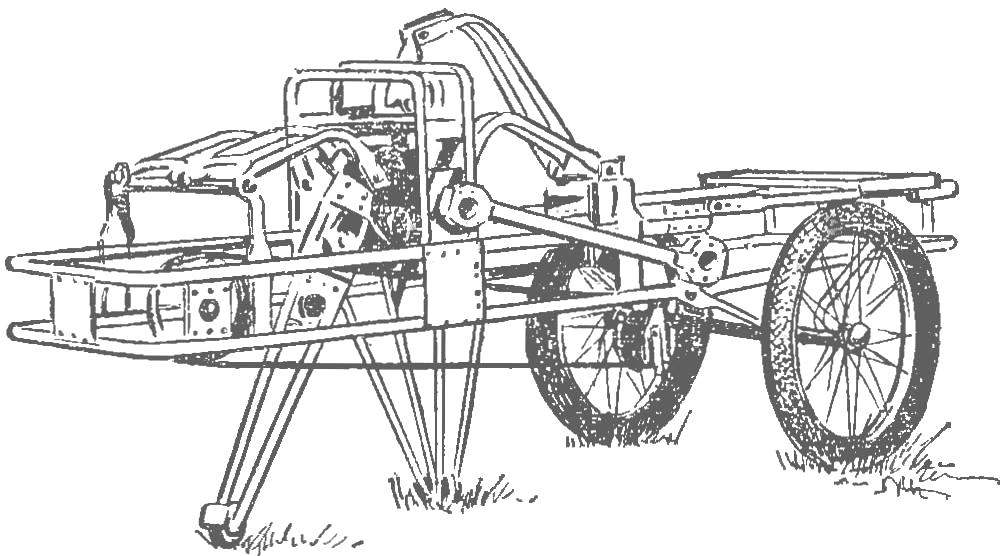
Заинтересовался проблемами шагоходов и знаменитый русский математик П. Л. Чебышев. В конце XIX века он построил модель «стопоходящей машины» на четырех «ногах» (вкладка), приводимых специальной системой рычагов. При движении каждая «нога» описывала траекторию наподобие движение ноги человека. Эта модель послужила прообразом «траекторного» направления в развитии шагоходов. Конструкторы таких машин стараются скопировать движения человека или животного, выбирают наиболее оптимальную схему передвижения «ног» механизма. Например, вмериканский изобретатель Дж. Шигпи предложил конструкцию шагающего аппарата, две «ноги» которого совершают движения с траекториями, представляющими собой овал. Или, например, в конструкции легковой тележки с шагающим движителем советского изобретателя И. Лягуши из города Лисичанска (рис. 1) запрограммирована более сложная траектория движения «ног», в основе которой также лежит овал. Такие шагающие машины с заранее заложенной в них программой движения «ног» идут слепо, не приспосабливаясь к условиям местности, и могут передвигаться лишь на гладких дорогах или в определенных условиях. И конечно, это пока не решение проблемы.
Конструкторы другого направления в развитии шагоходов — моделирующего — поставили перед собой более сложную задачу: создать шагающие машины по образу и подобию живых «механизмов», с полным повторением их механики. Однако с технической точки зрения они крайне неэкономичны, да и моделирование живых существ удается пока лишь частично. Например, у шагохода итальянца С. Муратори четыре «ноги» — это гидроцилиндры, являющиеся жалкой имитацией ноги животного. И в связи с этих такие механизмы пока не имеют практического значения и существуют лишь в виде моделей. Более или менее приемлемый шагающий аппарат с восемью поочередно работающими «ногами» построен в Калифорнии в ходе разработки проблем, связанных с поисками наиболее оптимальных конструкций новых вездеходных машин для передвижения по Луне. Он представляет собой своеобразное шагающее кресло для одного человека и уже нашел практическое применение в клиниках для больных детей. Аппарат обладает высокой маневренностью, неплохой скоростью, может взбираться по уступчатым препятствиям — например, по лестницам.
Многие интересные решения имеют модели шагоходов, построенных студентами МВТУ имени Баумана и МГУ, некоторые из этих новинок можно было наблюдать в действии на выставке НТТМ-76 (см. «М-К» № 10, 1976 г.). Большие возможности предоставляет «шагайка» ленинградского инженера В. Лобачева, у которой положение центра тяжести не изменяется при передвижении механизма. Любопытные конструкции шагающих моделей построены юными изобретателями — о них мы регулярно сообщаем на страницах нашего журнала.
Любопытный шагающий автомобиль построила одна немецкая фирма в начале нашего века. Это был грузовик, медленно и тяжело передвигавшийся на своих ногах-полозьях. Вот мы видим его в кадрах старой кинохроники неуклюже выползающим в клубах дыма из гаража. Судьба этой машины неизвестна, однако уже в то время диковинка не имела никакой поддержки. Действительно, неповоротливый аппарат не только не мог передвигаться по бездорожью, но и по дорогам-то «ходил» с великим трудом.
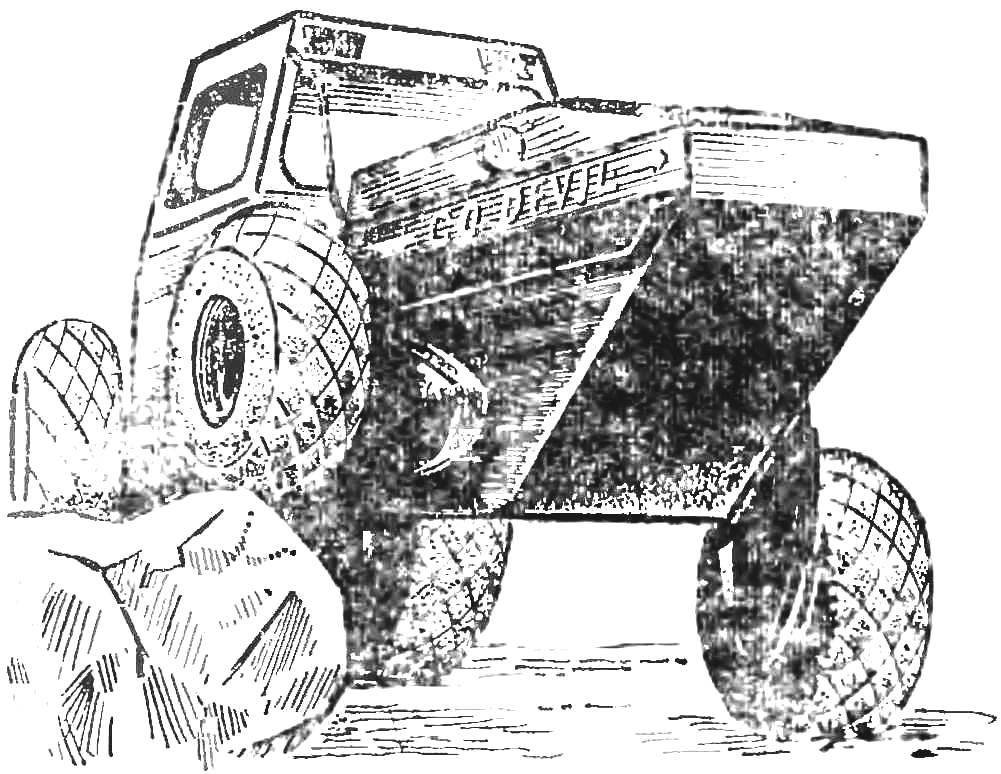
Рис. 4 Колесно-шагающий вездеход.
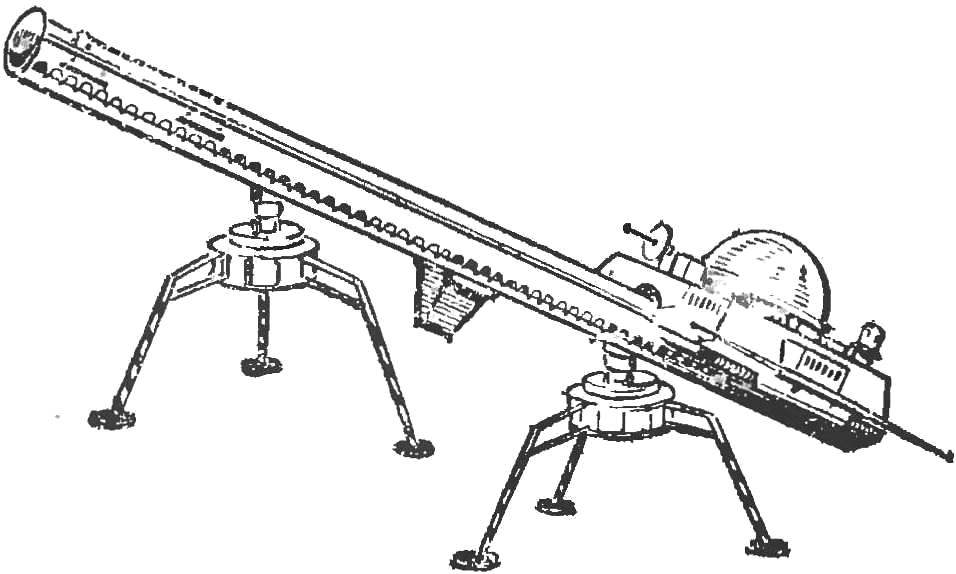
Рис. 5. Шагающий аппарат с двумя жесткими опорными треножниками, построенный юными техниками (выставка НТТМ-76).
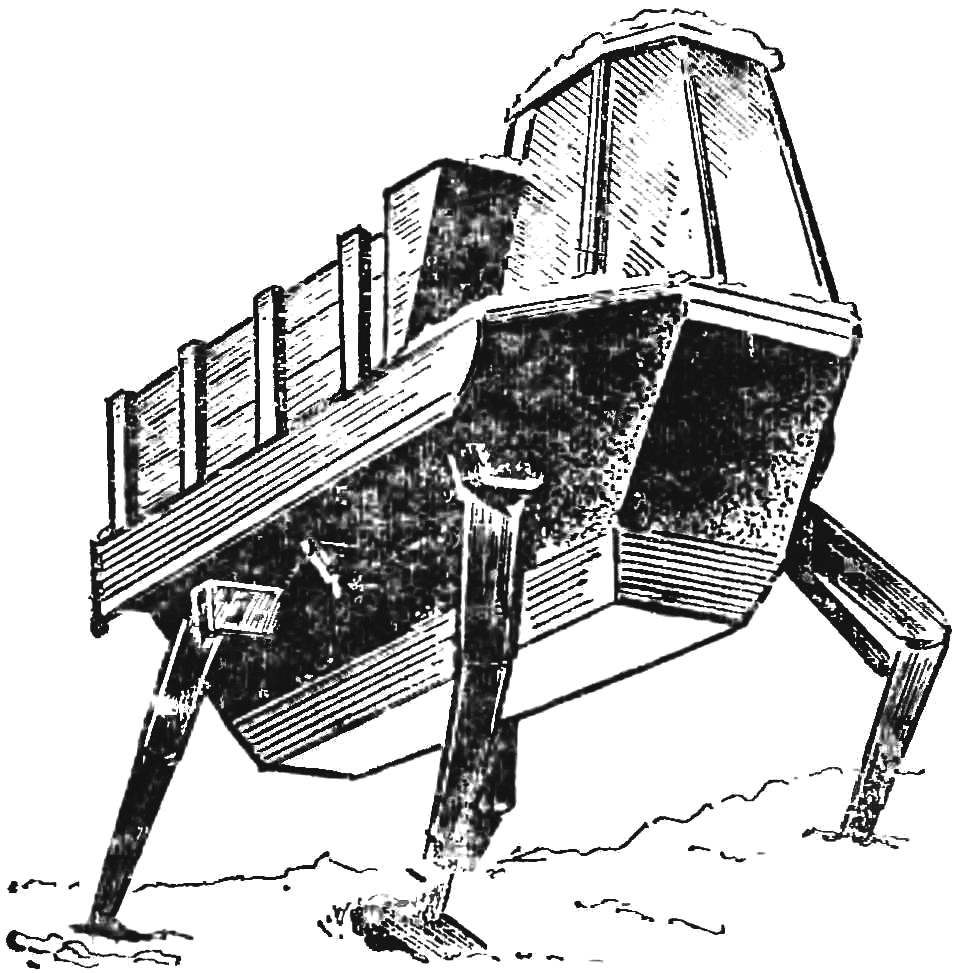
Рис. 6. Шагающий грузовик.
В наше время развитие получают комбинированные колесно-шагающие вездеходные автомобили, использующие пока лишь отдельные элементы шагания. Взять, к примеру, модель американского вездехода «падди-вэгон». У него вместо каждого из четырех колес установлены три колесика1 небольшого диаметра, с шинами низкого давления, расположенные звездообразно на концах коротких рычагов, находящихся под углом 120° относительно друг друга и закрепленных на общей оси. Все двенадцать колес машины ведущие. При передвижении ее по шоссе положение этих колес фиксируется таким образом, что вездеход едет только на восьми колесах, расположенных в нижней части каждой звездочки. При переходе на пересеченную местность все звездочки вращаются свободно, и в результате при встрече машины с препятствиями находящиеся на концах звездочек колеса как бы перешагивают через препятствия.
На некоторых современных автомобилях-вездеходах начали использовать подвеску всех колес на продольных балансирных рычагах с гидроприводом (рис. 3), что обеспечивает довольно широкую свободу перемещения оси колеса, приспособляемость к местности, подобно ноге живого существа. Развитием такой балансирно-шагающей конструкции стал вездеход «Шагающий дьявол» американской фирмы «Вагнер» (рис. 4). У него каждое колесо установлено на конце длинного балансира, вращающегося вокруг точки закрепления к шасси на 360°. Привод всех колес осуществляет я цепной передачей, расположенной внутри полых корпусов балансиров. Для движения через какие-либо препятствия он поочередно переносит на него свои передние «ноги», подтягивает корпус, а затем и задние «ноги». При соответствующем расположении балансиров вездеход может двигаться боком по косогору, сохраняя горизонтальное положение. В зависимости от расположения балансиров дорожный просвет достигает 1 м, а для погрузки и разгрузки машина опускается на «брюхо». Преимущества вездехода дополняются его способностью плавать, для чего он снабжен гребным винтом.
Заведующий лабораторией Института проблем управления АН СССР профессор Г. П. Катыс предложил модель двухзвенного колесно-шагающего механизма (рис. 2), принцип действия которого сводится также к перешагиванию через препятствие одним звеном и перенесению на него центра тяжести механизма; затем подтягивается и второе звено.
Идея поочередного перенесення «мог» относительно основного корпуса наподобие описанных выше конструкций заложена в другой модели шагохода профессора Г. П. Катыса. Опорами здесь служат два жестких треножника, которые могут перемещаться благодаря длинной блочной раме механизма. В то время как одни треножник приподнимается И переносится на определенное расстояние вперед, машина покоится на другом, а затем перемещается к первому и переносит над препятствием второй. Конструкция чрезвычайно проста, как и сама схема шагания, благодаря чему имеет хорошие перспективы практического использования. На выставке НТТМ-76 была показана действующая модель такого устройства, построенного юными техниками (рис. 5).
И тем не менее ни один механизм, в котором лишь частично используются элементы шагания, не может сравниться с шагоходами, полностью повторяющими всю механику движений живого существа и наделенными электронном аналитической системой управления машиной, в чем-то подобном мозгу. Эти шагающие механизмы, действительно внешне похожие на живых существ, стали наиболее интересной областью исследования ученых м конструкторов. Они составляют особое направление в создании шагающих машин, работающих по так называемому педипуляторному принципу. Правда, существующие экспериментальные образцы таких вездеходов пока еще не способны сами приспосабливаться к условиям местности и выбирать дорогу.
Два опытных образца педипуляторных шагоходов построила американская фирма «Дженерал электрик». Вот как описывается работа одной из машин (см. вкладку) высотой 3,5 м и массой 1200 кг. «Это неуклюжее творение человеческих рук, пошатывающееся на алюминиевых ногах, ходит не хуже своего создателя — со скоростью 8 км/ч. Одной ногой оно может поднять до 500 кг груза и легко перешагнуть через сложенные штабелями деревянные восьмидесятикилограммовые бруски, как через спички. Это «чудовище» способно выполнять и более деликатные операции: положив свою тяжелую «лапу» на куриное яйцо, оно даже не повредит его скорлупу… Машина может стоять на двух ногах, на коленях, ложиться на брюхо, ей ничего не стоит вытащить автомобиль из кювета, внести пианино через окно на второй этаж или сорвать яблоко…»
А вот другой педипуляторный шагоход — шагающий грузовик (рис. 6) грузоподъемностью 250 кг, работающий по тому же принципу, что и описанный выше механизм. Он оснащен грузовой платформой и закрытой кабиной, способен развивать скорость до 10 км/ч, преодолевать подъемы до 45°; для облегчения погрузки и разгрузки падающий грузовик встает на колени или ложится на днище.
И все же, несмотря на преимущества таких шагоходов, управление ими требует специальной тренировки и отнюдь не является легкой задачей для водителя. Здесь механизм лишь повторяет движения человека, иначе говоря, водитель несет на себе непосредственно все тяготы тяжелого пути. Недаром при использовании педипуляторных шагоходов на ровной дороге предполагается оснащать их автоматической системой движения без участия водителя.
И вот здесь-то перед учеными и инженерами многих областей науки и техники — электроники, кибернетики, механики, бионики и многих других — стоит сложнейшая задача создания автоматических «разумных» шагающих машин, способных полностью заменить человека и проникнуть в самые заповедные уголки нашей земли. Шагающие механизмы — огромное поле деятельности для самодеятельных конструкторов. Может быть, именно за шагающими вездеходными автомобилями будущее в освоении неисследованных земель нашей планеты.
Е. КОЧНЕВ. инженер
Рекомендуем почитать
 БЕЗ ТРАНСПОРТИРА
БЕЗ ТРАНСПОРТИРА
Чтобы правильно заточить сверло требуются либо долгая практика, либо дополнительное специальное оборудование. Но не торопитесь бежать за ними в магазин - чтобы сделать простейший калибр,... SAAB-99 (1967 г.)
SAAB-99 (1967 г.)
Фирма SAAB (Svenska Aeroplan Aktiebolaget) — шведское авиационное акционерное общество, ныне входит в концерн — SAAB Scania, являющийся шведским лидером в области транспортной и...
