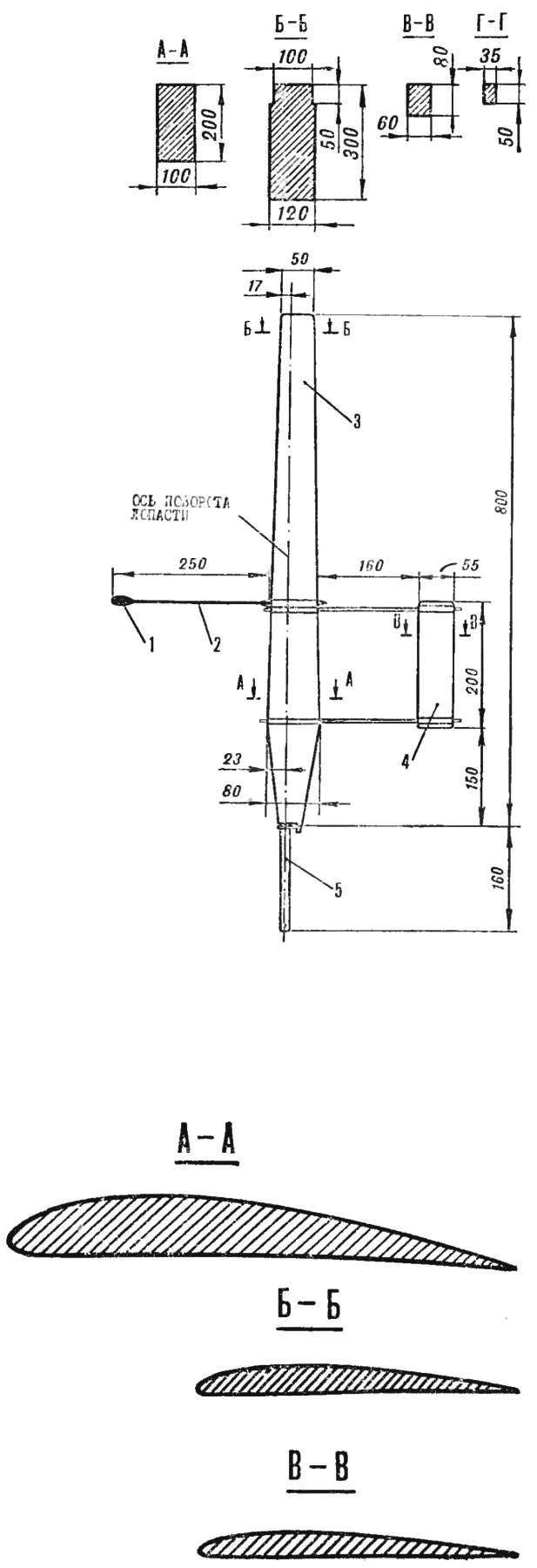
Профиль лопасти выпукло-вогнутый, переменный — его толщина и вогнутость уменьшаются к концу. В наиболее широком месте (сечение А — А) относительная толщина составляет 12%, вогнутость — 6%. На конце эти величины соответственно 8% и 4% (сечение Б — Б).
Лопасть изготовлена из бальзы, передняя и задняя кромки — из сосны. Ось стальная Ø 5 мм, вклеена на смоле и зафиксирована стальным штифтом Ø 2 мм. Вращается она во втулке на двух шарикоподшипниках типа 1000065 (наружный Ø 13 мм). Лопасти могут поворачиваться в пределах — 5° — + 40°.
Профиль стабилизатора плоско-выпуклый, с относительной толщиной 8% (сечение В — В), сделан целиком из бальзы удельного веса 0,1 г/см3. Как и лопасть, он оклеен микалентной бумагой, окрашен нитрокраской и покрыт сверху полимеризующимся лаком. Для горизонтального полета на модели установлен автомат перекоса (рис. 3), циклически изменяющий угол установки лопасти по отношению к фюзеляжу.
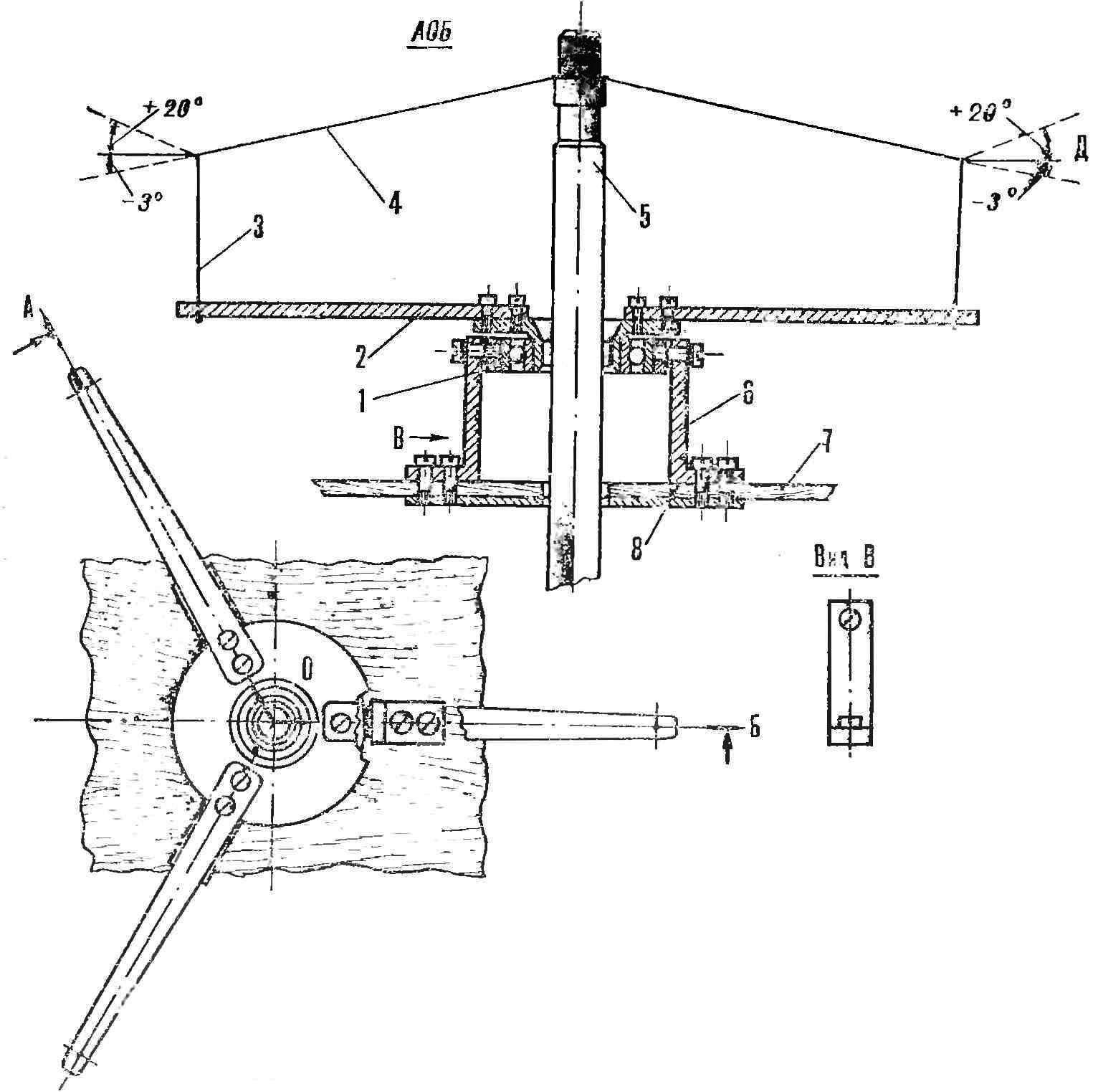
Рис. 3. Автомат перекоса:
1 — шарикоподшипник, 2 — рычаг, 3 — управляющая тяга, 4 — тяга к стабилизирующему грузу, 5 — вал несущего впита, 6 — стойка, 7 — кожух редуктора, 8 — место установки прокладок для регулировки плоскости автомата перекоса (в пределах 0—10°), Д — диапазон изменения углов установки тяг, идущих к стабилизирующим грузикам во время полета.
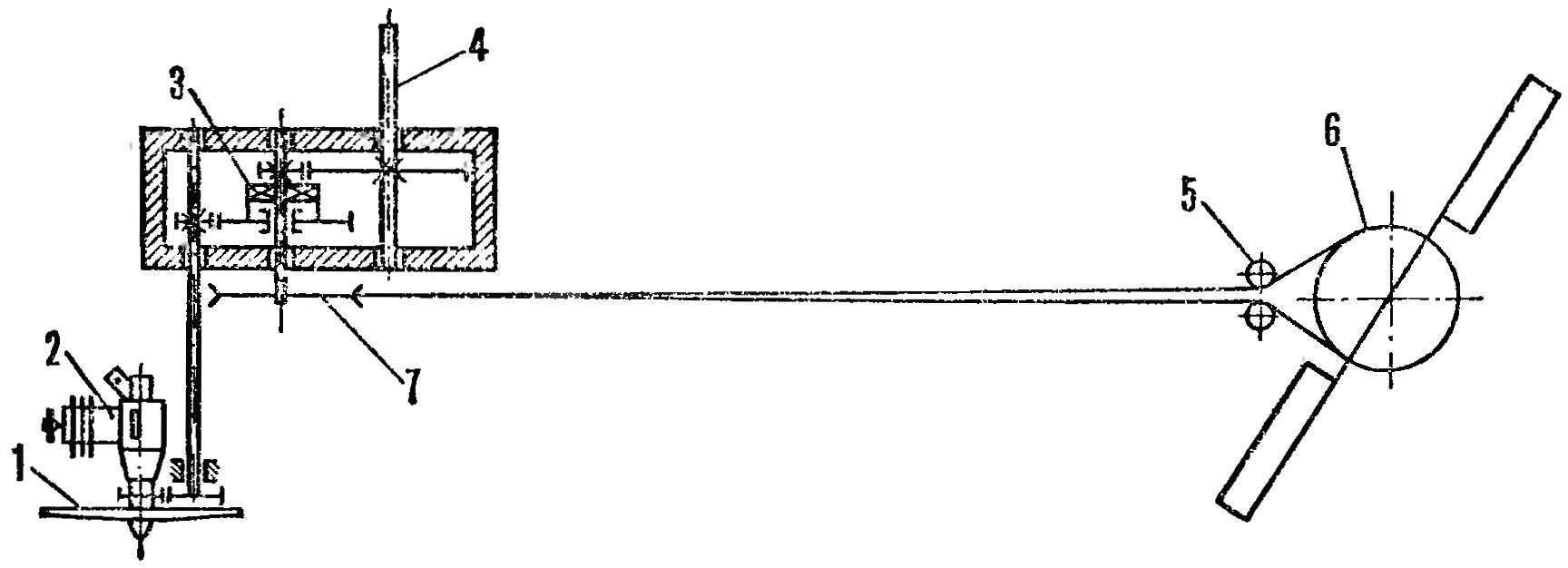
Рис. 4. Кинематическая схема редуктора:
1 — двигатель, 2 — маховик-вентилятор, 3 — муфта свободного хода, 4 — вал несущего винта, 5 — направляющие ролики, 6 — ведомый шкив, 7 — ведущий шкив.
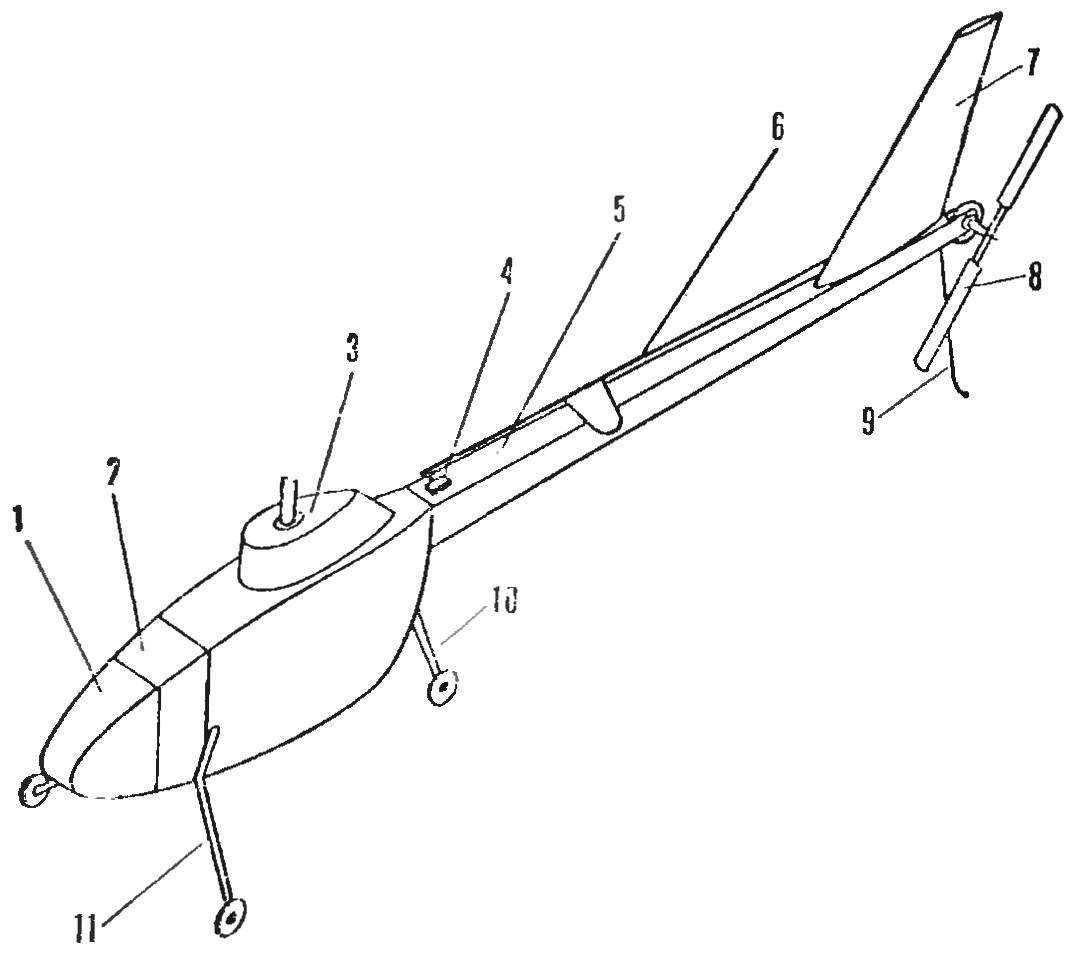
Рис. 5. Компоновочная схема фюзеляжа:
1 — центральная часть, 2 — отсек для радиоаппаратуры, 3 — кожух редуктора, 4 — рулевая машинка, 5 — хвостовая балка, 6 — управляющая тяга, 7 — киль, 8 — рулевой винт, 9 — костыль, 10 — задняя стоика шасси, 11 — передняя стойка шасси.
На рассматриваемой модели этот угол — фиксированный, отрегулированный на постоянную горизонтальную скорость полета V = 5 м/с.
Конструкция автомата перекоса базируется на шарикоподшипнике тина 1000903 с внутренним Ø 17 мм и наружным 30 мм. Внешнее кольцо подшипника прикреплено к фюзеляжу на трех дюралюминиевых стойках, установленных под углом 10° к плоскости вращения ротора по курсу полета. Вместе с ротором вращается и внутреннее кольцо с тремя рычагами, соединенными тягами со стабилизирующими грузами, которые циклически меняют шаг лопастей.
РУЛЕВОЙ ВИНТ имеет две лопасти (рис. 1), прямоугольные в плане, шириной 38 мм. Профиль выпукло-вогнутый, толщина в комлевой части 12%, на конце 8%.
Вертолет управляется по курсу изменением шага винта. Среднее значение угла установки лопастей 15°, диапазон изменения угла их поворота — 2° + 12°.
ДВИГАТЕЛЬ И РЕДУКТОР. Двигатель модели с рубашкой охлаждения Ø 40 мм крепится в нижней части фюзеляжа с помощью детали, выпиленной из дюралюминия. На его валу установлены первая шестерня редуктора (рис. 4) и вентилятор.
Редуктор несущего винта — трехступенчатый. Первая ступень выполнена на шестернях с модулем 0,5 мм шириной 6 мм: ведущая — стальная, с числом зубцов Z1 = 37, ведомая — латунная с числом зубцов Z2 = 48. Вторая ступень имеет шестерни с модулем 0,6 мм: ведущая — стальная, ведомая — дюралюминиевая, с числом зубцов соответственно Z3 = 23 и Z4 = 177. Третья ступень — на шестернях из того же материала, что и вторая. Модуль увеличен до 0,8 мм, число зубцов Z5 = 20, Z6 = 100.
Таким образом, общее передаточное отношение друг к другу валов двигателя и несущего винта составит:
і = Z1/Z2 · Z3/Z4 · Z5/Z6 ≈ 1/32 .
Вращение от основного редуктора к рулевому винту передается через кольцевую капроновую нить и два шкива, выточенных из дюралюминия. Ведущий установлен на второй ступени редуктора, ведомый — на рулевом винте. Их диаметры одинаковы. Поскольку последняя ступень редуктора имеет передаточное отношение 1:5, то без учета проскальзывания рулевой винт вращается в пять раз быстрее несущего.
На второй ступени основного редуктора установлена муфта свободного хода, обеспечивающая спуск вертолета при остановке двигателя. Авторотация не нарушает связи между несущим и рулевым винтами, что позволяет управлять курсом модели при снижении.
За время испытаний как на земле, так и в полете двигатель с редуктором проработал около трех часов. При этом потребовалось заменить поршень и шариковые подшипники вала двигателя. Износ шестерен редуктора не превысил допустимой величины.
ФЮЗЕЛЯЖ состоит из двух разъемных элементов: центральной части и хвостовой балки (рис. 5), которые соединены резиновыми нитями. Такое крепление надежно фиксирует положение хвостовой балки в полете и смягчает нагрузки при ударах на посадке. Конструкция набирается из сосновых стрингеров сечением 3X3 мм2 в хвостовой балке и 5X5 мм2 в центральной части, в которой установлены также 7 шпангоутов из фанеры толщиной 1 мм, усиленных сосновыми рейками сечением 3,5 X 3,5 мм2. Место крепления двигателя снизу усилено фанерой толщиной 5 мм. Редуктор своей верхней частью винтами М4X10 мм крепится к боковым брускам сечением 10X6 мм. Его кожух склеен из бальзы толщиной 2 мм.
Все узлы фюзеляжа соединены эпоксидной смолой, что обеспечивает достаточную прочность и надежную защиту от воздействия горючего.
Для размещения приемника и дешифратора впереди фюзеляжа сделан специальный отсек. Передние стойки шасси выгнуты из дюралюминиевых пластин толшиной 2,5 мм, задняя — из двух стальных прополочных стержней Ø 2,6 мм. Центральная часть фюзеляжа обтянута капроном, хвостовая балка — микалентной бумагой.
ЗАПУСК. Модель стартует с рук. Двигатель приводится в действие обычным способом, за маховик-вентилятор. Облегчить запуск можно стартером.
Первый полет надо проводить в штилевую погоду при нейтральном положении кольца автомата перекоса. Время работы двигателя желательно ограничить таймером. При правильном старте вертолет набирает высоту по вертикали со скоростью около 1,5 м/с.
После окончания работы двигателя модель переходит на авторотацию. Для предотвращения вращения фюзеляжа рукоятку управления рулевым винтом на пульте управления отклоняют вправо.
Дальнейшие полеты можно выполнять с отклоненным кольцом автомата перекоса, благодаря чему вертолет может совершать взлет с горизонтальной скоростью и управляться по курсу.
ОСНОВНЫЕ ПАРАМЕТРЫ МОДЕЛИ
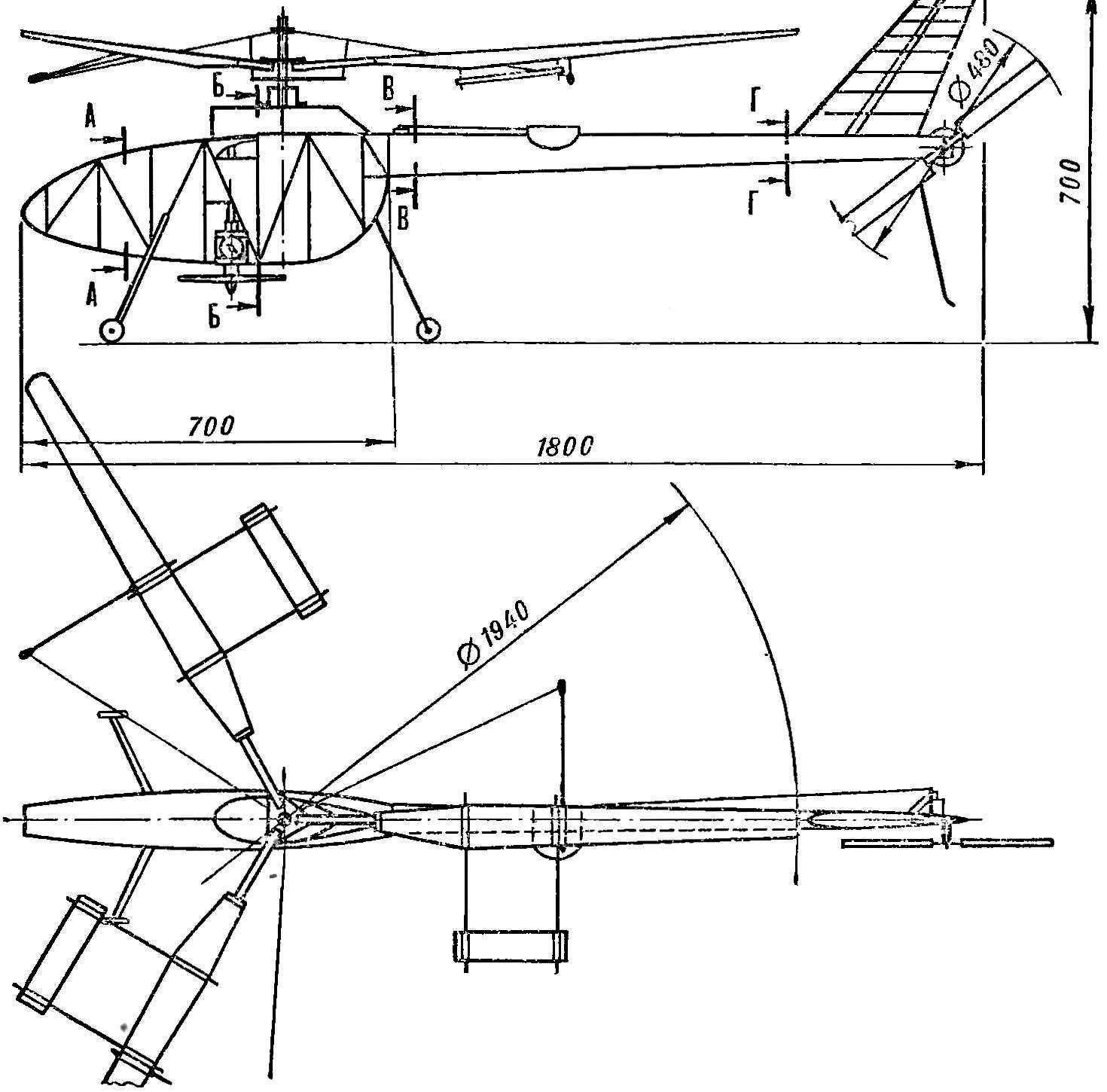
Диаметр несущего винта, мм — 1940
Ометеемая поверхность, дм2 — 294
Вес модели, г — 2950
Коэффициент заполнения несущего винта — 0,065
Диаметр рулевого винта, мм — 480
Полетная мощность двигателя, л. с. — 0,25
Скорость вращения вала двигателя в полете, об/мин — 12 000
Передаточное отношение редуктора от двигателя к несущему винту — 1:32
Передаточное отношение от двигателя к рулевому винту — 1:6,4
Скорость вращения несущего винта, об/мин — 375
Скорость вращения рулевого винта, об/мин — 1875
Вес аппаратуры, установленной на модели, г — 515
В. СЛЕПКОВ, кандидат технических наук, мастер спорта СССР
Рекомендуем почитать
 СПАЛЬНЫЙ СУПЕРКАР
СПАЛЬНЫЙ СУПЕРКАР
История появления в нашем доме этой конструкции началась с того, что я подарил трехлетнему сыну на день рождения модельку спортивного автомобиля Audi ТТ RS. Машинка так ему понравилось,... АРКА К АРКЕ — ГОТОВА ОРАНЖЕРЕЯ
АРКА К АРКЕ — ГОТОВА ОРАНЖЕРЕЯ
Арочная конструкция при всех прочих равных условиях всегда будет прочнее, надежнее и дешевле сооружений иных типов — тем более когда сама арка состоит из стержней, работающих только на...
 В последнее, время в авиационном моделизме широкое распространение получили летающие модели, управляемые по радио, в том числе вертолеты. Впервые такую модель продемонстрировал в 1959 году на Всесоюзных соревнованиях С. Воробьев. Для управления полетом он применил принцип изменения центровки аппарата. Спустя год на первенстве страны в Куйбышеве появился вертолет В. Борисова с аэродинамическим приводом ротора. В 1964 году на матчевой встрече спортсменов Москвы и Ленинграда он же представил построенную по схеме Б. Юрьева новую модель с рулевым винтом. Однако машина была «сырой» и, к сожалению, так и осталась незаконченной.
В последнее, время в авиационном моделизме широкое распространение получили летающие модели, управляемые по радио, в том числе вертолеты. Впервые такую модель продемонстрировал в 1959 году на Всесоюзных соревнованиях С. Воробьев. Для управления полетом он применил принцип изменения центровки аппарата. Спустя год на первенстве страны в Куйбышеве появился вертолет В. Борисова с аэродинамическим приводом ротора. В 1964 году на матчевой встрече спортсменов Москвы и Ленинграда он же представил построенную по схеме Б. Юрьева новую модель с рулевым винтом. Однако машина была «сырой» и, к сожалению, так и осталась незаконченной.