Двигатель соединяется с гребным валом с помощью шарнирной муфты, состоящей из двух дюралюминиевых полумуфт и шарнирно закрепленного в них двумя стальными штифтами эластичного резинового сухаря. Дейдвуд представляет собой дюралюминиевую трубку с внешним диаметром 10 мм, в торцы которой вставлены фторопластовые (можно и текстолитовые) втулки. При монтаже этого узла в корпус модели дейдвуд заполняется консистентной смазкой. Гребной винт выполнен из латуни — лопасти винта закрепляются в точеной втулке с помощью пайки, на гребном валу винт закреплен цилиндрическим штифтом.
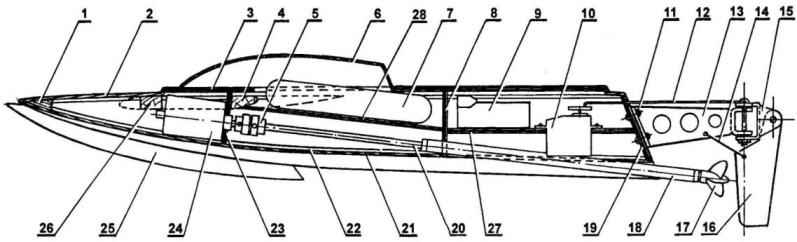
Компоновка судомодели:
1 — носовая бобышка (липа); 2 — палуба (фанера s1); 3 — крышка кокпита (фанера s2); 4,26 — балки мостика (бук); 5 — шарнирная муфта; 6 — оболочка фонаря (выклейка из стеклоткани и эпоксидного связующего; 7— никель-кадмиевые аккумуляторы; 8— шпангоут № 2 (фанера s3); 9 — приемник аппаратуры дистанционного управления; 10—рулевая машинка; 11 — крепление рулевого кронштейна (болт М4 с гайкой и шайбой); 12— рулевая тяга (проволока ОВС d2); 13 — рулевой кронштейн; 14—оттяжка (резиновая нить); 15 — баллер; 16 рулевое перо (фанера s4); 17 гребной винт d35, h = 47); 18 — дейдвуд; 19 — транец (фанера s5); 20 — дейдвудный вал; 21 — обшивка днища (фанера s1); 22 — стрингер (сосна, рейка 4×4); 23 шпангоут № 1 (фанера s5); 24— ходовой электродвигатель (Speed-600 фирмы Graupner); 25—боковой поплавок; 27 — днище отсека управления (фанера s4); 28 — днище аккумуляторного отсека (фанера s4)
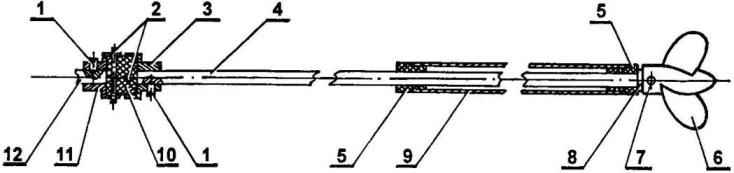
Устройство привода гребного винта:
1 — стопоры (винты М3); 2 — оси шарнира (цилиндрические штифты d2); 3,11—полумуфты (дюралюминий); 4 — дейдвудный вал (сталь, d5); 5 —втулки дейдвуда (фторопласт или текстолит); 6— гребной винт (d35, h=47); 7 — крепление винта (цилиндрический штифт d2); 8 — шайба; 9 — дейдвуд (дюралюминий, труба d10x1); 10 — крестовина шарнира (резина); 12 — вал электродвигателя
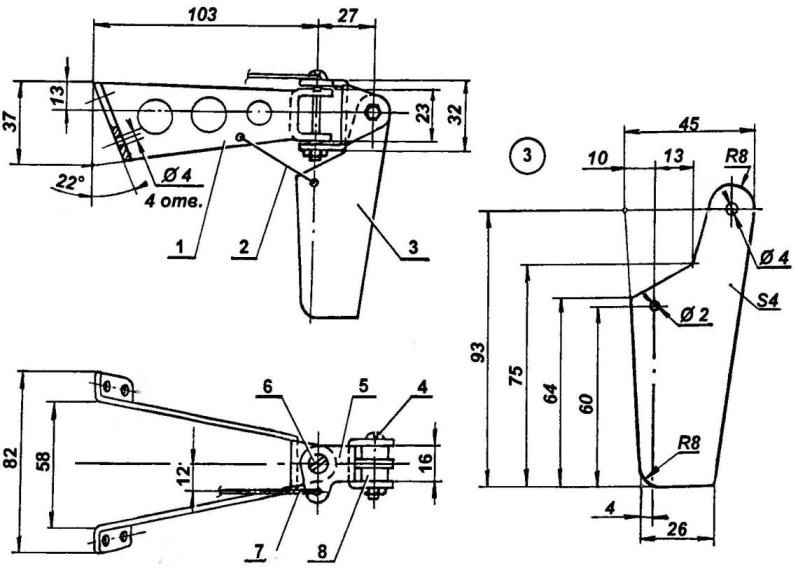
Рулевое устройство глиссера:
1 — рулевой кронштейн (дюралюминий, лист s2,5); 2 — оттяжка (резиновая нить сечением 2×2); 3 — рулевое перо (фанера s4); 4— ось рулевого пера (винт М4 с гайкой); 5 — баллер (дюралюминий, лист s2,5): 6 — ось поворота баллера (болт М4 с гайкой); 7—рулевая тяга (сталь, проволока ОВС d2)
Рулевое устройство представляет собой кронштейн, согнутый из листового дюралюминия толщиной 2,5 мм. Из того же материала сделан и баллер — на кронштейне он навешивается с помощью болтика и гайки с резьбой М4. Для предупреждения отворачивания гайка контрится нитрокраской. Рулевое перо выпилено из 4-мм фанеры и имеет симметричный крыльевой профиль. В баллере оно закрепляется шарнирно с помощью болтика М4, гайки и двух фторопластовых втулок. В вертикальном положении рулевое перо удерживается резиновой нитью.
Регулировка глиссера сводится к загрузке корпуса балластом для подбора оптимального положения центра тяжести. Правильно сбалансированная модель легко выходит на глиссирование, красиво и четко описывает циркуляции.
И.ТЕРЕХОВ
Рекомендуем почитать
 DUESENBERG SJ
DUESENBERG SJ
Когда блистательный бизнесмен Эррет Лоббен Корд включил в 20-х годах прошедшего века в свою финансовую империю небольшую фирму Duesenberg Motors, он первым делом поручил владельцам фирмы... КАК СДЕЛАТЬ «ЦИММЕРИТ»
КАК СДЕЛАТЬ «ЦИММЕРИТ»
Всем интересующимся историей бронетанковой техники хорошо известно, что весьма характерной чертой внешнего облика германских танков начиная с 1943 года было антимагнитное покрытие брони...

 Гоночная судомодель с электродвигателем. Гоночные радиоуправляемые миниатюрные скутеры с электроприводом всегда были популярными у судомоделистов — особенно среди тех, кто лишь начинает осваивать эти интереснейшие гоночные болиды. Этому в немалой степени способствуют: относительная простота обводов современных глиссеров, позволяющая изготавливать корпуса из самых различных материалов и использовать наиболее доступные для моделиста технологии; надежность электрической силовой установки, исключающей проблемы с запуском, присущие двигателям внутреннего сгорания; и, наконец, не слишком дорогая — всего лишь двухканальная — аппаратура дистанционного управления.
Гоночная судомодель с электродвигателем. Гоночные радиоуправляемые миниатюрные скутеры с электроприводом всегда были популярными у судомоделистов — особенно среди тех, кто лишь начинает осваивать эти интереснейшие гоночные болиды. Этому в немалой степени способствуют: относительная простота обводов современных глиссеров, позволяющая изготавливать корпуса из самых различных материалов и использовать наиболее доступные для моделиста технологии; надежность электрической силовой установки, исключающей проблемы с запуском, присущие двигателям внутреннего сгорания; и, наконец, не слишком дорогая — всего лишь двухканальная — аппаратура дистанционного управления.