 Вы никогда не задумывались над тем, что на вашей гоночной автомодели установлен неплохой гироскоп, да и не один? А ведь они изготовлены и поставлены на место вашими собственными руками! Их роль выполняют маховик двигателя и колеса шасси. При не столь уж маленькой массе и размерах частота их вращения настолько велика, что такую не всегда встретишь и во «взрослой» технике.
Вы никогда не задумывались над тем, что на вашей гоночной автомодели установлен неплохой гироскоп, да и не один? А ведь они изготовлены и поставлены на место вашими собственными руками! Их роль выполняют маховик двигателя и колеса шасси. При не столь уж маленькой массе и размерах частота их вращения настолько велика, что такую не всегда встретишь и во «взрослой» технике.
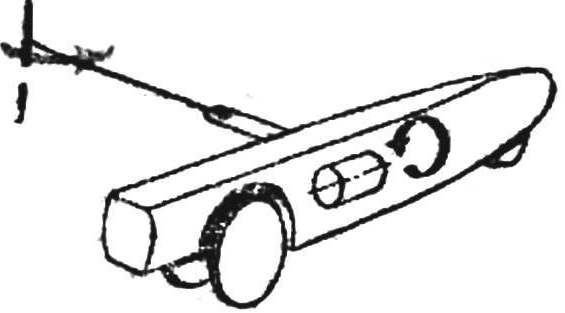
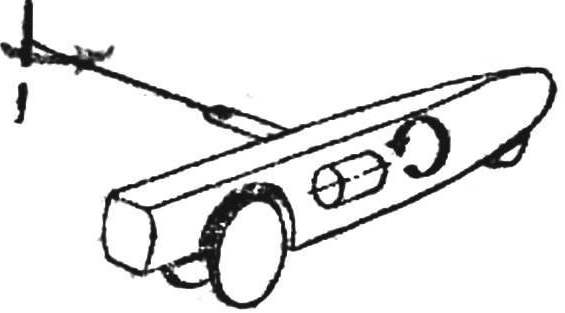
Гироскопический эффект, характеризующий стремление быстровращающихся масс сохранить свое положение в пространстве, в полной мере проявляется при заездах микромашин на кордодроме. Как? Давайте попытаемся разобраться. Прежде всего договоримся, что влиянием момента передних колес на поведение модели можно пренебречь — у них по сравнению с задними незначительная масса и меньший диаметр.
После предварительных преобразований получена формула для определения гироскопического момента в интересующих нас условиях (радиус движения микроавтомобиля согласно правилам проведения соревнований равен 995 см):
М = 14,89·10-7·P·R2·n·V (г·см),
где
P — вес маховика или колеса, г,
R — радиус маховика или колеса, см,
n — частота вращения маховика или колеса, об/мин,
V — скорость модели, км/ч.
При анализе влияния на поведение модели гироскопического момента маховика можно рассмотреть четыре возможных случая: 1 — модель движется против часовой стрелки, двигатель вращается против часовой стрелки, 2 — модель движется по часовой стрелке, двигатель вращается против часовой стрелки, 3 — модель движется против часовой стрелки, двигатель вращается по часовой стрелке, 4 — модель движется по часовой стрелке, двигатель вращается по часовой стрелке.