 (Окончание. Начало см. в № 9—11)
(Окончание. Начало см. в № 9—11)
РУЛЕВЫЕ МАШИНКИ
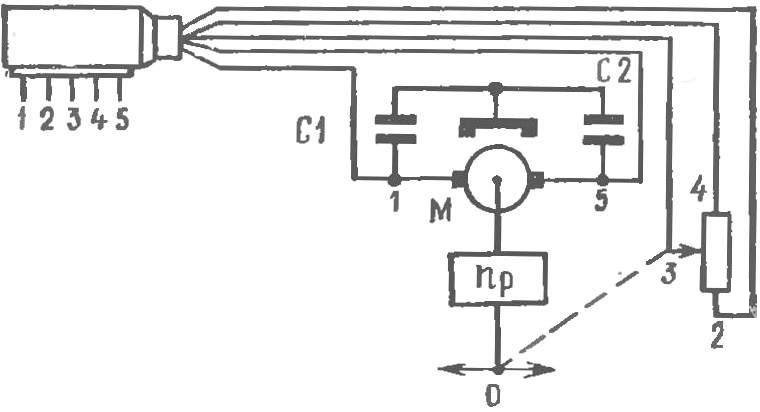
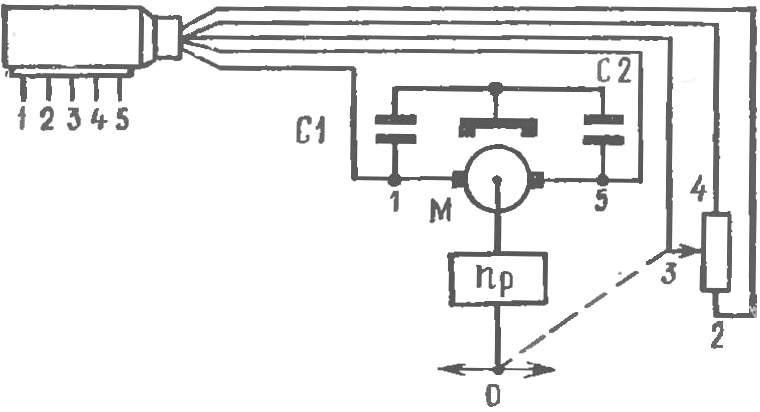
В системе «Радиопроп» применены электродвигатели постоянного тока с независимым возбуждением (с постоянными магнитами) типа ДП-1-26, ДП-1-13 с доработанными щетками и ДП-1-26 *, перемотанный на рабочее напряжение 4,5—5 В. Замена угольных щеток на металлические, сделанные из тонких проволочек, дает возможность улучшить характеристики двигателей: уменьшить статический момент сопротивления, ПОВЫСИТЬ К.П.Д. и т. д. Электрическая схема исполнительного механизма — на рисунке 1.
Основные параметры двигателей представлены в таблице 1, а их рабочие характеристики — на рисунках 2—5.
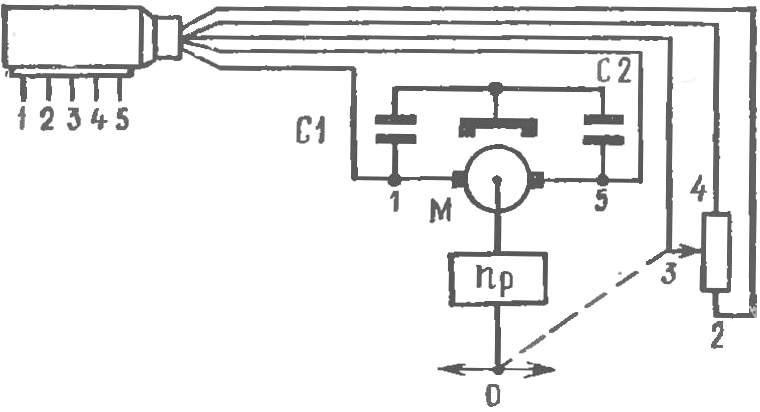
Рис. 1. Электрическая схема рулевой машинки.
Серводвигатель и передаточное отношение редуктора выбирают из условия передачи необходимой мощности нагрузке (под нагрузкой подразумеваются усилия, необходимые для привода рулей поворота и высоты, элеронов, механизма выпуска и уборки шасси, для управления режимом двигателя).
ТАБЛИЦА 1
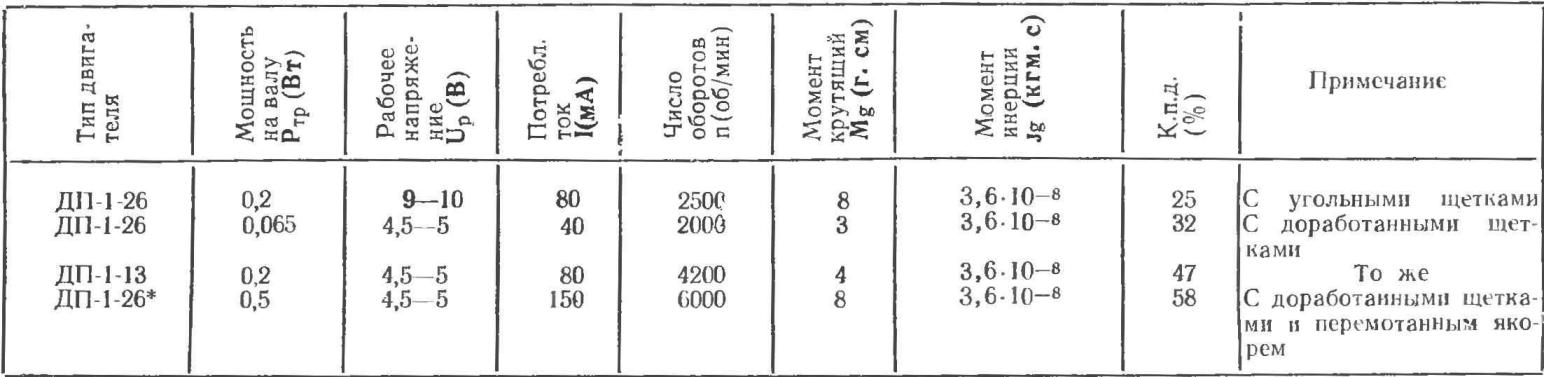

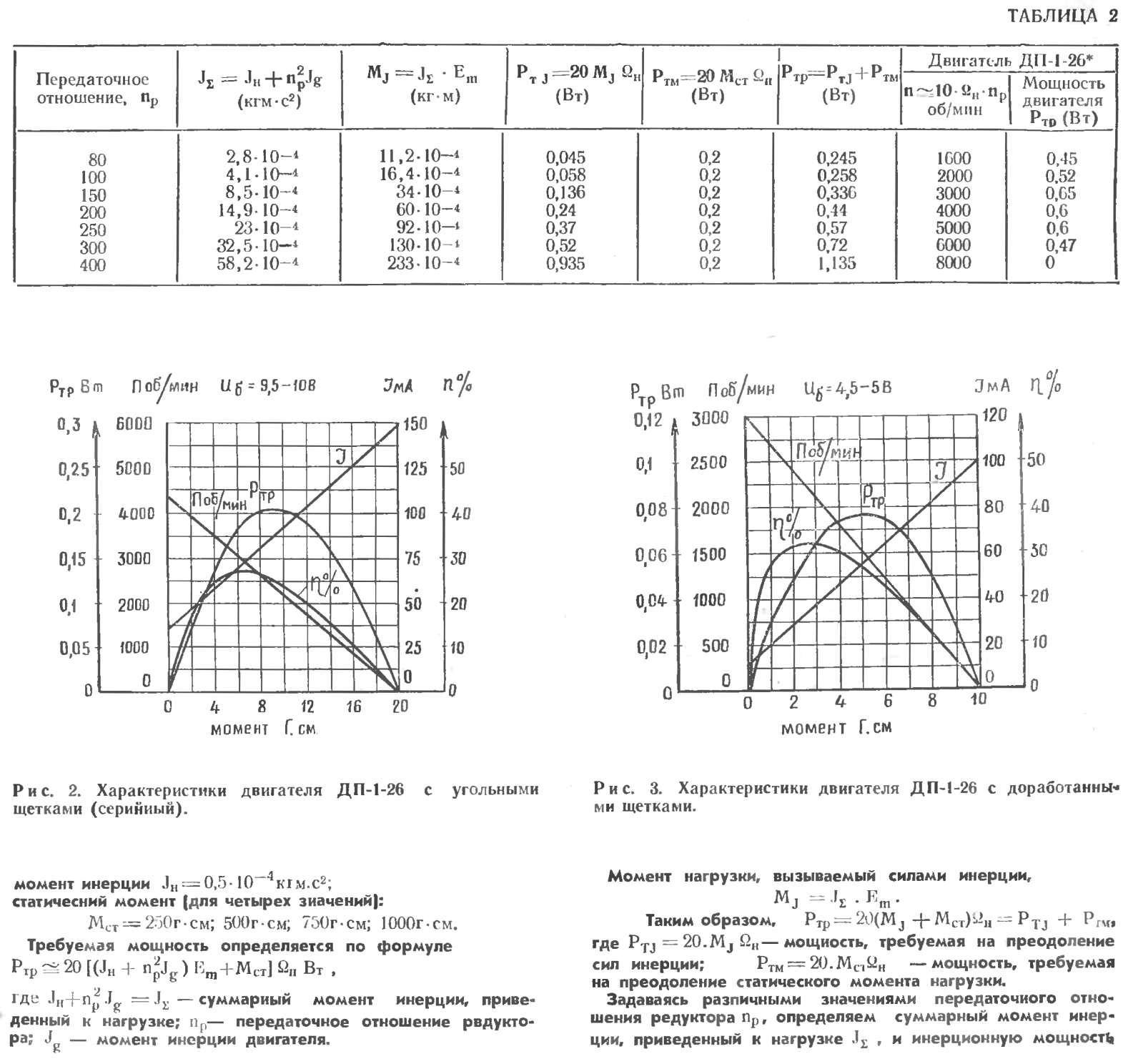
PTJ. Мощность выбранного типа двигателя и полная мощность нагрузки Pгр определяется в зависимости от передаточного отношения редуктора по таблице 2, рассчитанной для двигателя ДП-1-26*— при Мст = 500 г·см. Аналогичным образом проведен расчет и для других значений Мст.
Кривые мощностей нагрузки и двигателей ДП-1-26*, ДП-1-13 в зависимости от передаточного отношения редуктора приведены на рисунке 6. Из графика видно, что максимум превышения мощности двигателя ДП-1-26 * над мощностью нагрузки (при Мст = 1000 г·см) находится между 90 и 200. Для двигателя ДП-1-13 максимум превышения мощности над мощностью нагрузки (при М ст= 250 г·см) находится между 60 и 110. Таким образом, любое передаточное отношение редуктора в этих пределах дает достаточный запас мощности для правильного функционирования рулевой машинки, установленной на борту радиоуправляемой модели. Руководствуясь приведенными соображениями, передаточное отношение редуктора выбрано равным np = 136—140, которое, как показали исследования, хорошо согласуется с параметрами сервоусилителя и нагрузкой.
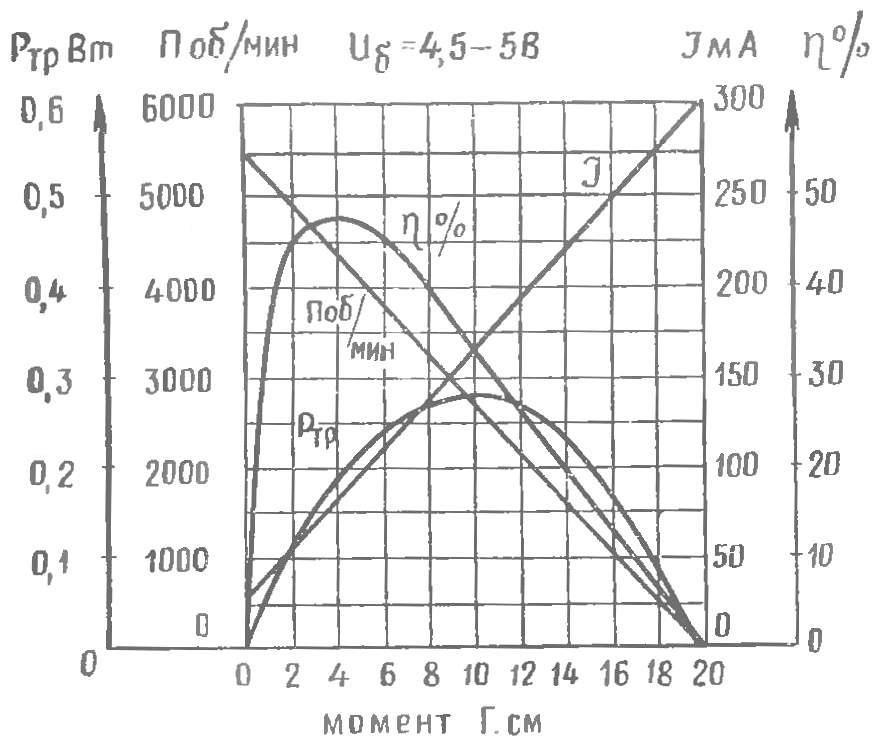
Рис. 4. Характеристики двигателя ДП-1-13 с доработанными щетками.
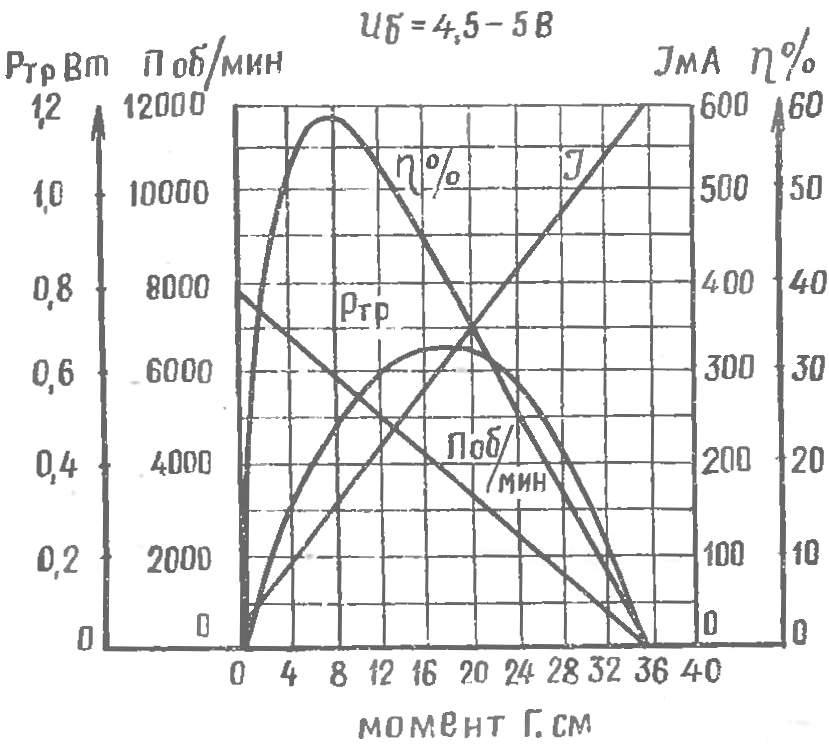
Рис. 5. Характеристики двигателя ДП-1-26* с перемотанным якорем и доработанными щетками.
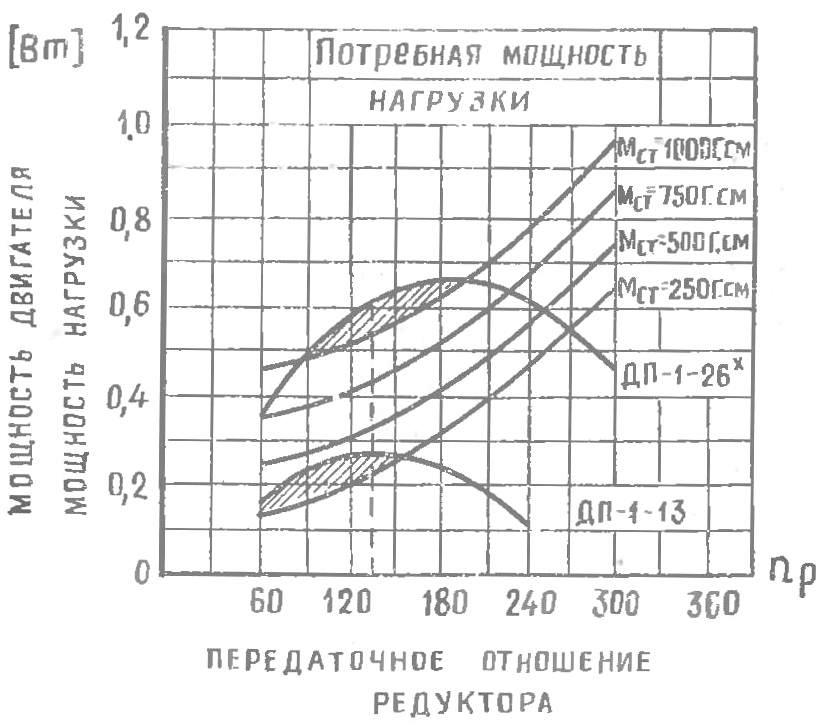
Рис. 6. График для определения оптимального передаточного отношения редуктора.
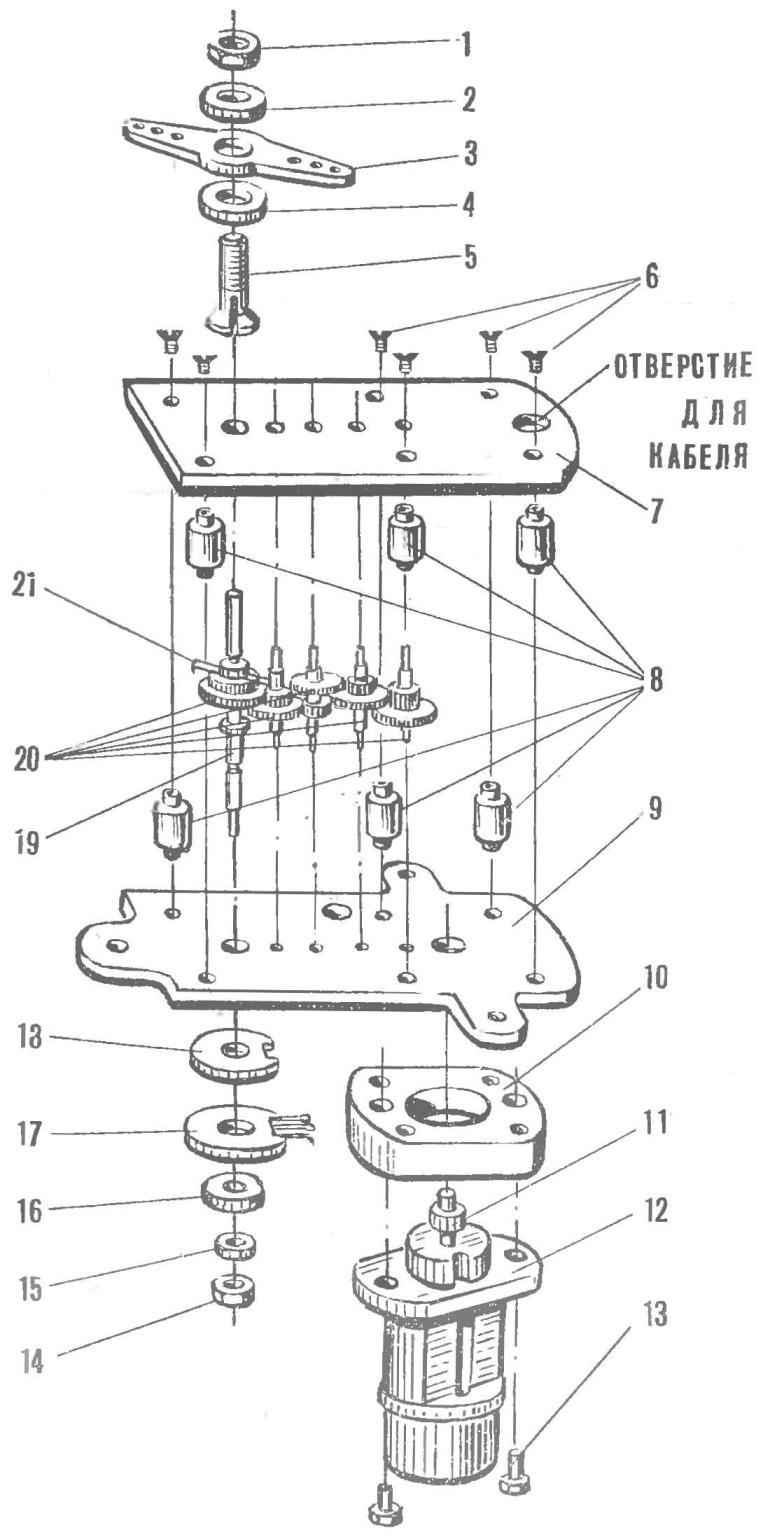
Рис. 7. Устройство рулевой машинки:
1 — гайка (Ст. 45); 2 — шайба (Д16Т); 3 — качалка (текстолит); 4 — шайба (Д16Т); 5 — цанга (Д1СТ); 6 — винт М2,5; 7 плата верхняя (текстолит); 8 — стойка (Д16Т); 9 — плата нижняя (текстолит); 10 — прокладка (текстолит); 11 — ведущая шестерня 12 — электродвигатель; 13 — винт крепления; 14 — гайка; 15 — шайба (латунь); 16 — движок потенциометра; 17 — потенциометр обратной связи: 18 — прокладка (гетинакс); 19 — выходной вал редуктора (Ст. 45), 20 — шестерни редуктора; 21 — ограничитель (Ст. 45).
Устройство рулевой машинки — на рисунке 7. Наладка ее сводится к обеспечению плавности вращения редуктора и потенциометра обратной связи без электродвигателя. При этом особое внимание уделяется надежности контакта движка потенциометра и линейности его сопротивления в зависимости от угла поворота выходного вала редуктора. Затем, после установки электродвигателя, окончательно проверяют плавность хода редуктора.
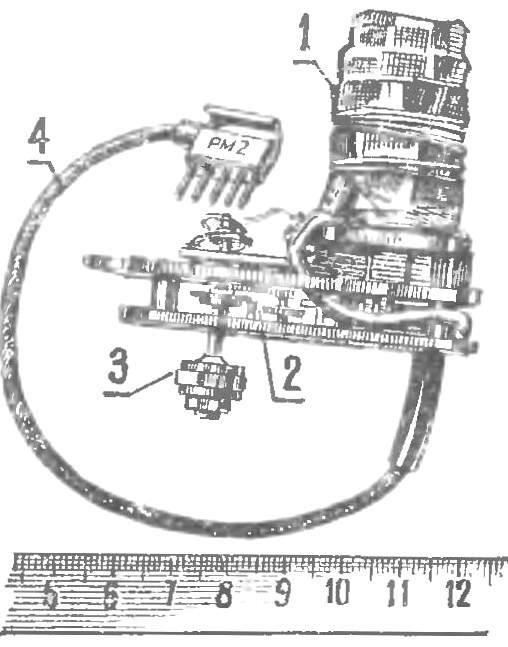
Рис. 8. Внешний вид рулевой машинки:
1 — электродвигатель; 2 — шестерни редуктора; 3 — выходной вал редуктора; 4 — кабель питания с разъемом
Правильно собранная машинка (рис. 8) должна иметь минимальное значение люфта выходного вала. Следует помнить, что рулевые машинки, установленные на борту моделей, подвержены довольно значительным вибрационным перегрузкам. Поэтому к механической прочности и амортизации рулевых машинок предъявляются жесткие требования. Ненадежность контакта в цели обратной связи или якоря электродвигателя в условиях вибрации может стать причиной радиопомех, нарушающих работу радиоприемного устройства.
По вопросам, затронутым в статье, рекомендуем прочитать следующие книги:
1. Веребрюсов И. А., Синхронные передачи и следящие системы. Л., Судпромгиз, 1954.
2. «Техника передачи результатов измерения по радио». Сборник переводов по радиотелеметрии. М., Воениздат, 1955.
3. Трансел Дж. Дж., Справочная книга по технике автоматического регулирования. Перевод с английского. М., «Знание», 1962.
4. Беляев Н. И., Нагорский В. Д., Выбор двигателя и редуктора следящих систем. М., «Машиностроение», 1972.
5. Петров Б. И., Электропривод систем управления летательных аппаратов. М., «Машиностроение». 1973.
Г. ОХОТНИКОВ, г. Жуковский, Московской области
Рекомендуем почитать
 КОМНАТНЫЙ САМОЛЕТ
КОМНАТНЫЙ САМОЛЕТ
В № 2 за этот год мы поместили статью В. Колпакова «Изготовление микропленки», в которой автор рассказал, как можно сделать в домашних условиях пленку для обтяжки комнатных моделей. Статья... НЕ ВСЕГДА СРЕДНИЕ «СЕРЕДНЯКИ»
НЕ ВСЕГДА СРЕДНИЕ «СЕРЕДНЯКИ»
Опыт работы с немцами весьма пригодился для усовершенствования собственных лодок. В частности, удалось заметно улучшить конструкцию «щук», последовательно ликвидируя те или иные...
