Воздушный винт летающей модели преобразует энергию двигателя в работу поступательного перемещения модели. При вращении винта некоторой массе воздуха придается движение в определенном направлении. При этом, согласно третьему закону Ньютона, на винт действует сила, направленная в сторону, противоположную созданному движению воздуха, и называемая силой тяги винта. Умноженная на скорость полета, она дает работу поступательного перемещения модели. Разделив ее на работу, затрачиваемую на вращение винта, получим коэффициент полезного действия винта.
Естественно, что основной задачей конструктора при проектировании винта будет получение высокого к.п.д. на разных скоростях полета. Максимальные к.п.д., порядка 0,85—0,87, возможны только при очень тщательном подборе винтомоторной группы и регулировке модели.
Любой воздушный винт состоит из лопастей, число которых у моделей может колебаться от одной до четырех, и втулки, при помощи которой лопасти крепятся к валу двигателя. Удвоенное расстояние от оси вала до конца лопасти винта даст один из важнейших геометрических параметров — его диаметр. Другой важный параметр — шаг винта.
На рисунке 1 показан шаг для одного из поперечных сечений лопасти, удаленного от оси винта на расстояние r. Другими словами можно сказать, что шаг данного сечения есть расстояние, на которое переместился бы винт за один оборот в гайке, диаметр которой равен 2 r, а угол подъёма резьбы равен углу между хордой взятого сечения и плоскостью вращения винта.
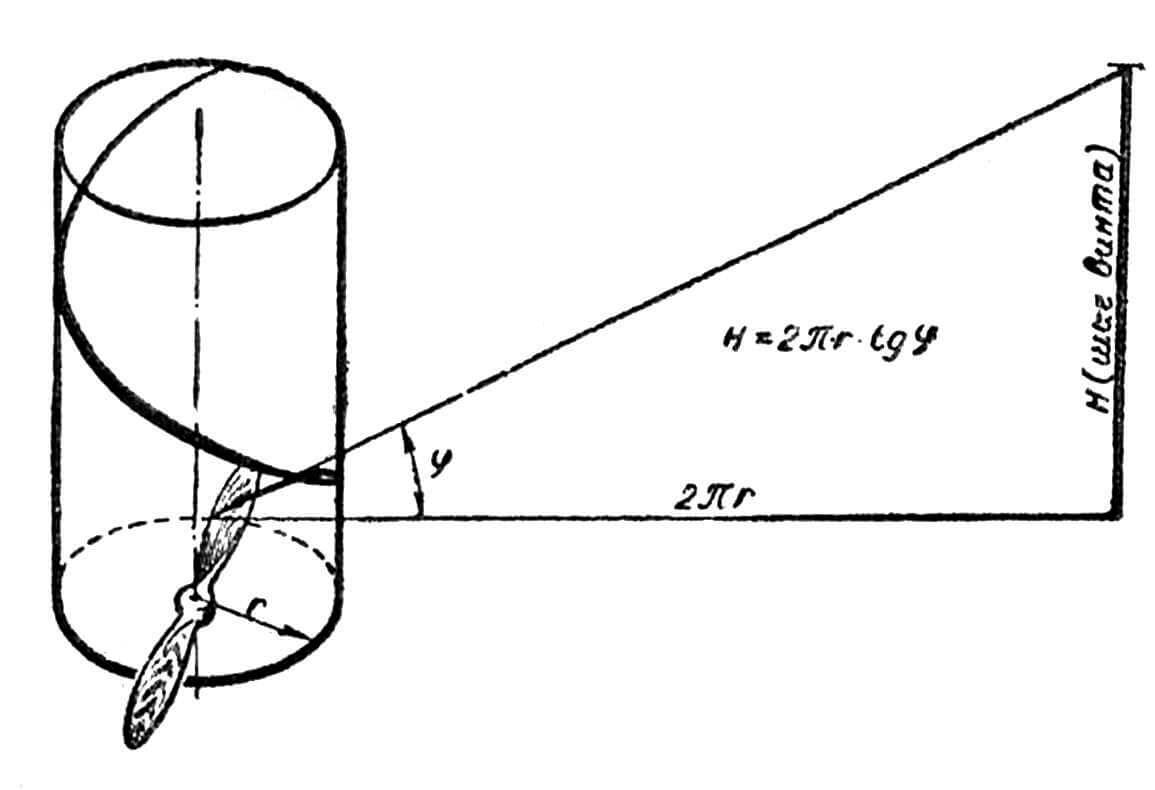
Шаг может быть постоянным или переменным вдоль лопасти и определяется по формуле Н = 2πr • tgφ, где: Н — шаг выделенного сечения, r — радиус сечения, φ — установочный угол сечения (угол между плоскостью вращения винта и хордой сечения).
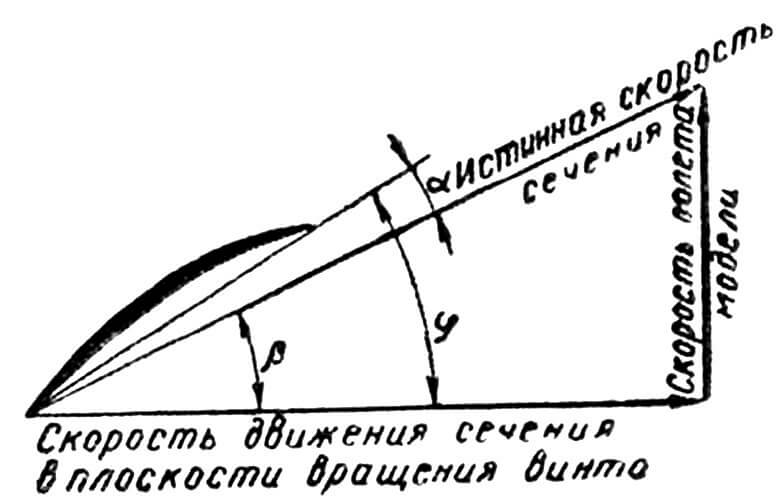
Шаг всех сечений винта постоянного шага одинаков. За шаг винта переменного шага принимается шаг сечения, взятого на расстоянии 0,75 г. Рассмотрим работу поперечного сечения лопасти в потоке (рис. 2). Его можно сравнить с сечением маленького крыла, встречающего поток под некоторым углом атаки. Сечение обычно имеет небольшой диапазон углов атаки (3÷8°), при которых обтекание будет наивыгоднейшим, то есть при относительно небольшом сопротивлении воздуха движению сечения подъемная сила его будет высока. Приближенно можно считать, что во время полета модели с винтом постоянного шага все поперечные сечения лопасти будут встречать поток примерно под одним углом атаки. Если этот угол будет лежать в диапазоне наивыгоднейших углов, то к.п.д. винта будет высоким.
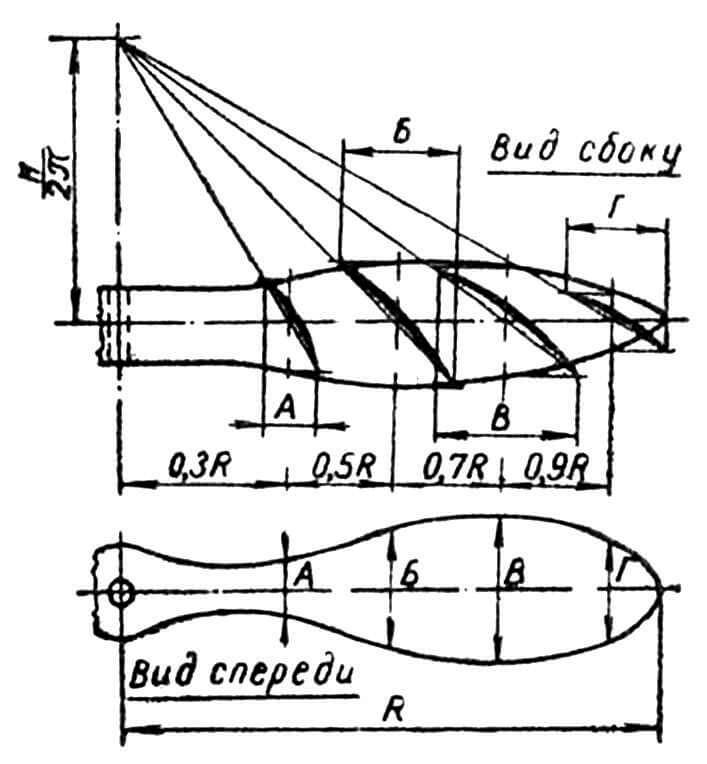
Порядок построения видов винта спереди и сбоку показан на рисунке 3. При таком порядке один из видов выбирается заранее. На рисунке 3 сначала был вычерчен вид сбоку, а затем выбран шаг винта. На чертеже откладывается величина шага, деленная на 2π. Вид спереди получается графическим построением.
Как было уже сказано, диаметр и шаг являются важными геометрическими параметрами винта, от подбора которых зависит его к.п.д. На к.п.д. влияют также ширина и форма лопастей, их количество и профили поперечных сечений. Все перечисленные параметры, включая диаметр и шаг винта, выбираются в соответствии с классом модели и типом двигателя.
Существует много методов подбора винтов, как теоретических, так и практических. При теоретическом расчете применяют теорию винта и данные экспериментов. Но из-за сложности расчетов, а главное, из-за отсутствия аэродинамических характеристик авиамодельных винтов большинство моделистов предпочитают смешанный метод подбора, то есть используют только некоторые данные теории, а геометрические параметры проектируемого винта подбирают близкими к параметрам винтов, хорошо зарекомендовавших себя на практике.
Знать некоторые положения теории обязан каждый моделист, помышляющий о спортивных успехах. Вооружившись этими знаниями, после небольшого количества прикидок можно спроектировать хороший винт.
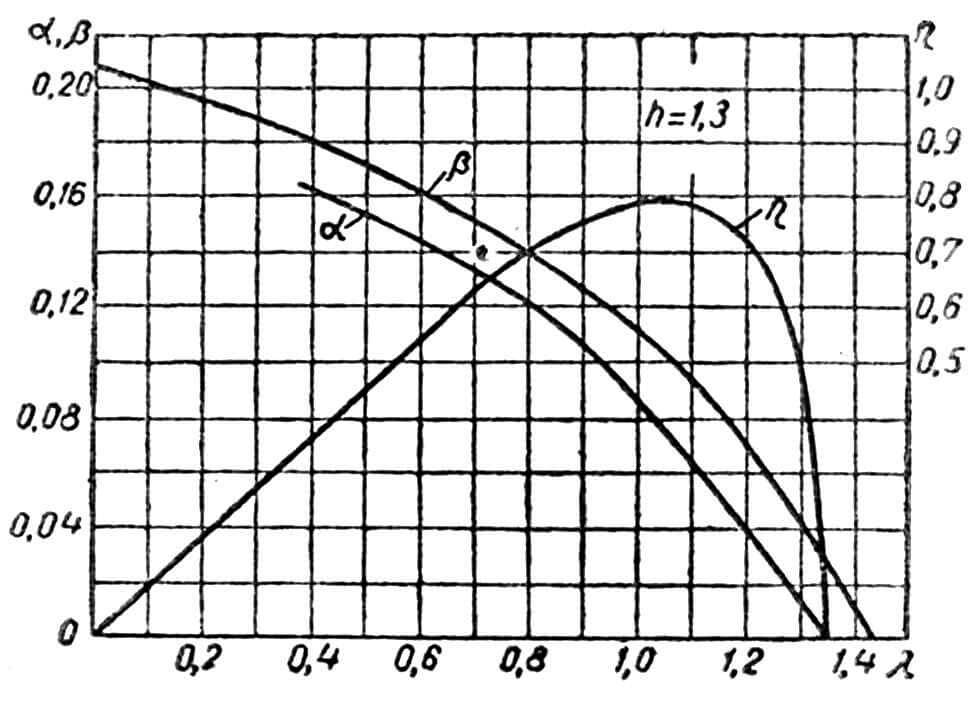
Предположим, модель летит со скоростью V м/сек; ее винт вращается со скоростью n об/сек. Расстояние, проходимое моделью за один оборот винта, равно V/n = S. Величина S называется поступью винта. Разделив S на D (диаметр винта), получаем относительную поступь винта λ, то есть λ=S/D = V/nD. От величины λ зависят в большой степени к.п.д. винта, а также два коэффициента α и β, которые для винтов с определенными геометрическими параметрами определяются опытным путем в аэродинамических трубах.
К.п.д. можно подсчитать по формуле:
η=(α/β)·λ
где:
α — коэффициент тяги,
β — коэффициент мощности винта,
λ — относительная поступь.
Тяга винта на данной модели определяется из выражения:
Р = αρ D4 n2;
где ρ — массовая плотность воздуха, которая в нормальных условиях (при температуре +15°С и давлении 760 мм ртутного столба) равна 0,125 (кг·сек2)/м2
α — коэффициент тяги,
D — диаметр винта (в м),
n — число оборотов в секунду.
Момент М на валу винта будет:
М = (β/2π)· ρD5 n2;
здесь β — коэффициент мощности винта.
Коэффициенты α и β в аэродинамических трубах определяются при помощи специального прибора. Для того чтобы знать, какую тягу Р создаст винт, к валу которого приложен момент М на модели, летящей со скоростью V, необходимо знать зависимость α и β от величины относительной поступи винта. При помощи упомянутого прибора и строится зависимость к.л.д. винта от величины Следует учитывать, что эта зависимость не может быть распространена на винты иной геометрии.
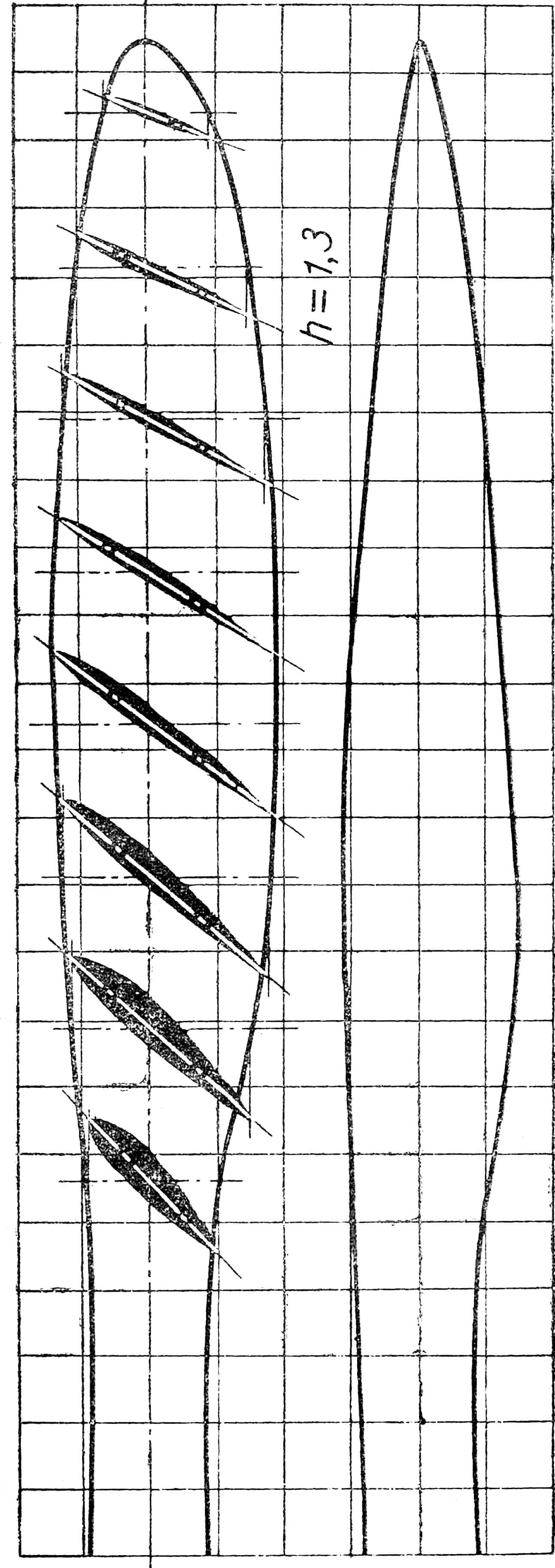
Для примера рассмотрим характеристики винта (рис. 4), чертежи которого приведены на рисунке 5. Эти характеристики даны с учетом того, что за винтом расположен фюзеляж, который своим влиянием несколько ухудшает работу винта.
Из характеристик видно, что наибольший к.п.д. винта получается при λ =1,1.
Это не случайный результат. Дело в том, что винт может характеризоваться еще одним относительным параметром, а именно относительным шагом винта
h=H/D
В нашем примере h = 1,3 и разность h —λ при максимальном к.п.д. равна 0,2. При такой разности между двумя относительными величинами к.п.д. почти всех винтов максимален.
Теперь сделаем следующее предположение: пусть взятый нами винт диаметром D = 0,6 м установлен на резиномоторной модели весом G = 0,23 кг. Скорость полета модели V = 5 м/сек.
Пользуясь графиком (рис. 4), мы можем узнать, при каких оборотах винта за секунду получается та или иная тяга, какой момент необходимо приложить к валу винта, чтобы получить те или иные обороты, а следовательно, и тягу. Подсчет удобнее всего свести в таблицу.
| 1 | n | 6,5 | 7 | 8 | 9 | 10 | 11 |
| 2 | λ | 1,28 | 1,19 | 1,04 | 0,92 | 0,83 | 0,75 |
| 3 | β | 0,045 | 0,071 | 1,102 | 0,123 | 0,135 | 0,145 |
| 4 | α | 0,02 | 0,045 | ,008 | 0,103 | 0,118 | 0,128 |
| 5 | γ | 0,55 | 0,745 | 0,785 | 0,77 | 0,74 | 0,65 |
| 6 | n2 | 42 | 49 | 64 | 81 | 100 | 121 |
| 7 | Р кг | 0,0135 | 0,035 | 0,082 | 0,133 | 0,189 | 0,248 |
| 8 | М кг.см | 0,3 | 0,53 | 1,07 | 1,53 | 2,11 | 2,71 |
| 9 | n2 | 27 | 153 | 170 | 57 | 25 | 13 |
| 10 | Δ t | 4,1 | 21,9 | 21,25 | 6,33 | 2,5 | 1,64 t общ —57,7 сек. |
| 11 | sin Q | -0,04 | 0,05 | 0,26 | 0,48 | 0,72 | 0.97 8,0 Н общ. = 64,5 м |
| 12 | Δ Н | -0,82 | 5,5 | 27,6 | 15,2 | 9,0 |
Первая строчка таблицы содержит значения возможных оборотов, вторая — значения относительной поступи винта, подсчитанные по формуле λ =V/nD для принятых оборотов. Третья, четвертая и пятая строки содержат значения α, β и η;, которые берутся из графика (рис. 4) при соответствующих значениях Значения Р (шестая строка) находим из приведенного выше выражения: Р = αρ D4 n2, значения М — из выражения М = (β/2π)· ρD5 n2.
Зная характер уменьшения момента по мере раскручивания мотора, а также зависимость угла набора высоты от тяги, можно определить время раскручивания двигателя, а также высоту, на которую поднимется модель за это время.
Для этого возьмем кривую моментов 40-граммового двигателя, изготовленного из 12 нитей резины 1×6 «пирелли» (рис. 6).
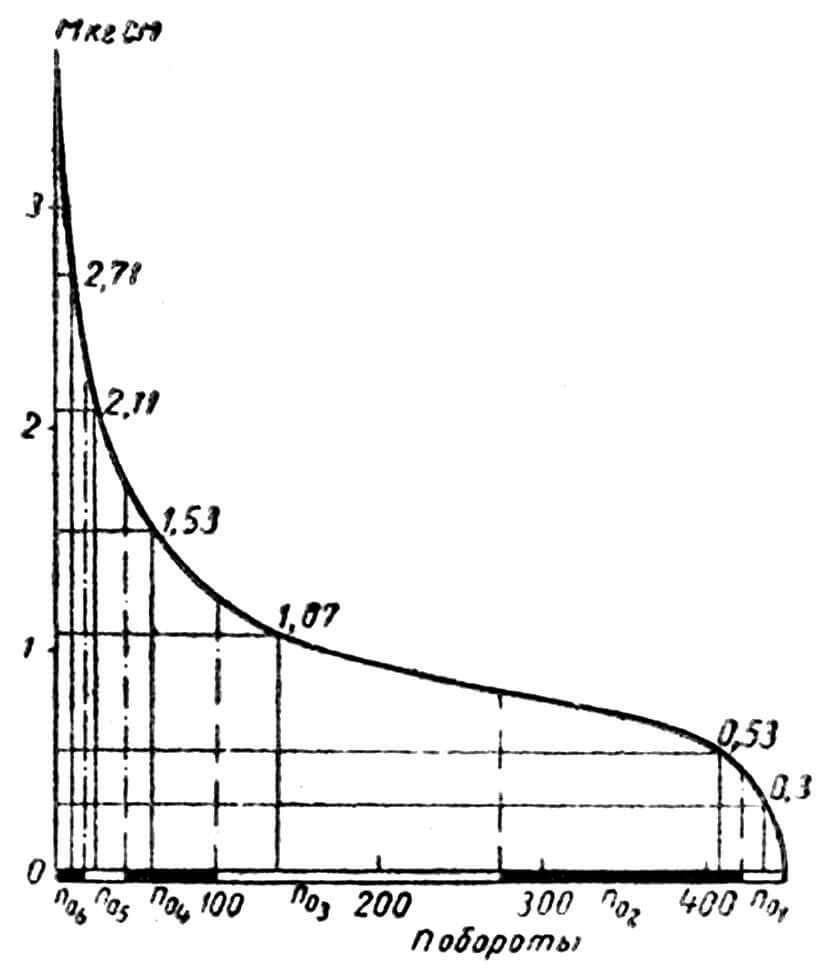
Отложим значение М из восьмой строки таблицы на вертикальной оси графика моментов и проведем горизонтальные прямые до пересечения с кривой, а затем из точек пересечения опустим перпендикуляры на ось оборотов. Потом, проведя вертикальные прямые, отстоящие от соседних перпендикулярных оси оборотов отрезков примерно на равные расстояния, получим 6 участков на оси оборотов — nα1, и nα2 и т. д.
Количество оборотов, соответствующее каждому участку, занесем в девятую строку таблицы. Разделив количество оборотов на значение их скорости вращения из первой строчки, будем иметь значение продолжительности раскрутки для каждого из 6 участков оси оборотов. Сложив эти отрезки времени, получим суммарное время раскрутки резинового двигателя с точностью до 2 — 3 сек.
И наконец, покажем, как подсчитывается высота подъема модели в спокойном воздухе за время раскрутки двигателя.
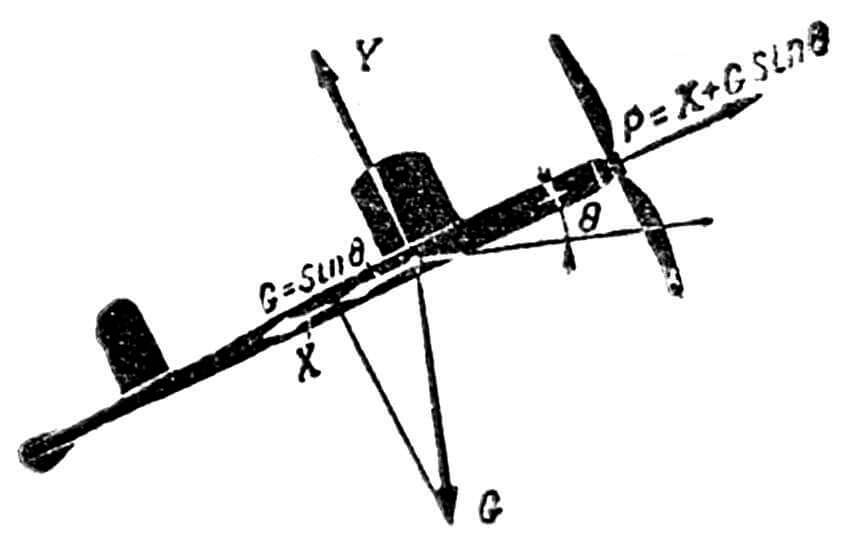
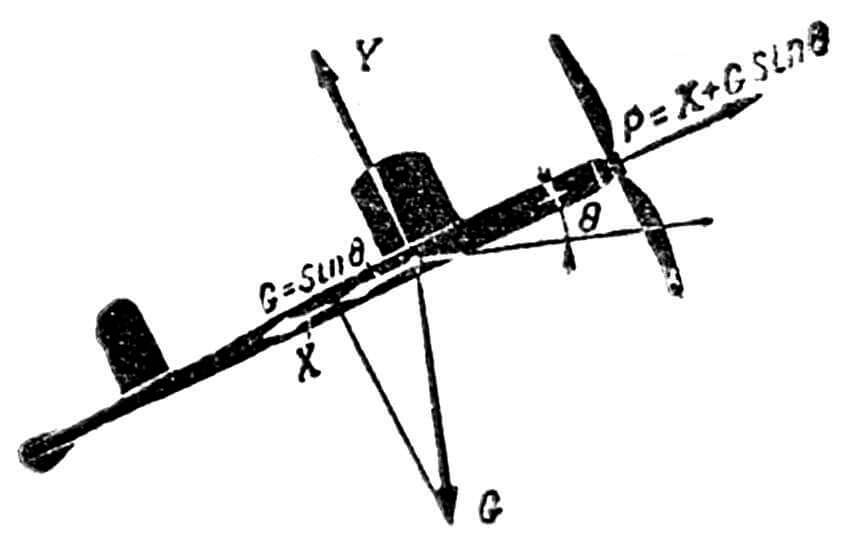
Для этого познакомимся сначала с некоторыми аэродинамическими характеристиками модели. На рисунке 7 показано, какие силы действуют на модель в горизонтальном полете: сила тяги Р, сила сопротивления модели X, по величине равная Р, сила тяжести G и подъемная сила крыла Y·G.
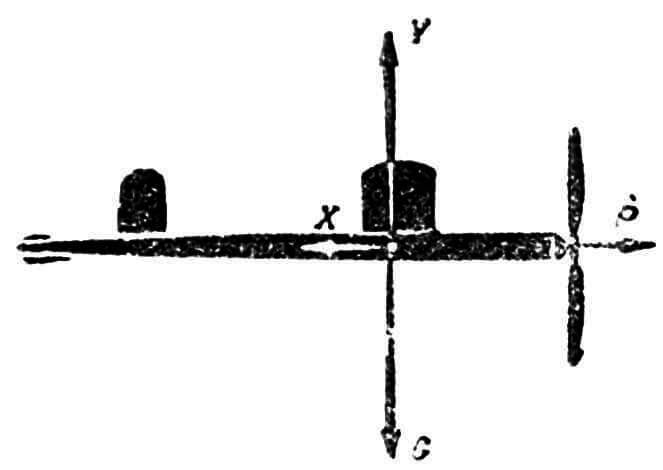
Отношение — Y/X называется аэродинамическим качеством модели. Обычно для спортивных резиномоторных моделей качество в моторном горизонтальном полете лежит в пределах 10-12. Теперь рассмотрим равновесие сил у модели, поднимающейся под углом в к горизонту (рис. 8). Силе тяги Р необходимо преодолеть проекцию силы тяжести G на продольную ось модели и силу сопротивления X, то есть:
Р = X+G·sinΘ.
Заменим X через отношение Y/K (из формулы качества), a Y, в свою очередь, заменим через G. Таким образом, формула тяги примет вид:
P=G/K+G·sinΘ.
Решив это уравнение относительно sinΘ, получим:
sinΘ=(P-G/K)/G.
Как помните, G нашей модели равно 0,23 кг. Качество модели примем равным 10. Тогда получим:
sinΘ=(P-0,023)/0,023.
Значение sinΘ внесем в одиннадцатую строку таблицы для соответствующих значений Р.
В последнюю строку внесем значение высот, на которую поднимается модель за отрезки времени, приведенные в строке 10. Значение прироста высот получаем, умножая путь, равный скорости V = 5 м/сек, на указанное время и на соответствующие значения sinΘ то есть ΔH=V·Δt·sinΘ. Знак минус в первой колонке означает, что модель в конце раскрутки двигателя уже переходит на снижение. Сложив полученные отрезки высот, определим высоту моторного полета нашей модели.
Для резиномоторных моделей используют одно- или двухлопастные винты с более тонким сечением. Для снижения лобового сопротивления модели при планировании лопасти делаются складывающимися после остановки винта.
Для практического подбора винта достаточно на первый случай взять шаблоны (виды спереди и сбоку) проверенного на практике винта и под него подобрать резиномотор соответствующего сечения, то есть обеспечивающего продолжительность раскрутки в пределах 35—45 сек.
Какие же существуют способы для улучшения характеристик винтов! Способов много.
Можно увеличить диаметр винта, уменьшив ширину лопасти. Однако здесь возникает сразу несколько проблем, основные из которых — прочность и вес лопастей. Второй способ — уменьшение шага лопасти у ее комля и на конце, но это надо делать очень осторожно, так как можно принести иногда больше вреда, чем пользы. Третий способ — применение однолопастных винтов, но при этом неизбежна вибрация.
Для моделей с механическими двигателями подбор винта тоже дело довольно сложное, так как при относительно невысоких скоростях полета обороты современных двигателей очень высоки и, следовательно, h—λ получается очень высоким. Для первых полетов следует брать готовые винты, а для последующих делать по форме подобные рекомендованным, но с другим шагом. Таким образом можно найти удовлетворительное решение.
ТЕХНОЛОГИЯ ИЗГОТОВЛЕНИЯ ВИНТОВ
Инструменты, необходимые для изготовления винтов:
1. Нож (типа сапожного). 2. Рубанок малогабаритный. 3. Стамеска плоская. 4. Пила-ножовка по дереву. 5. Рашпиль или драчевой напильник полукруглый. 6. Дрель ручная. 7. Набор сверл. 8. Плоскогубцы. 9. Круглогубцы. 10. Паяльник. 11. Тиски слесарные. 12. Ножницы по металлу.
Этот перечень можно увеличить, особенно если иметь в виду работу по металлу при изготовлении винтов музейных моделей.
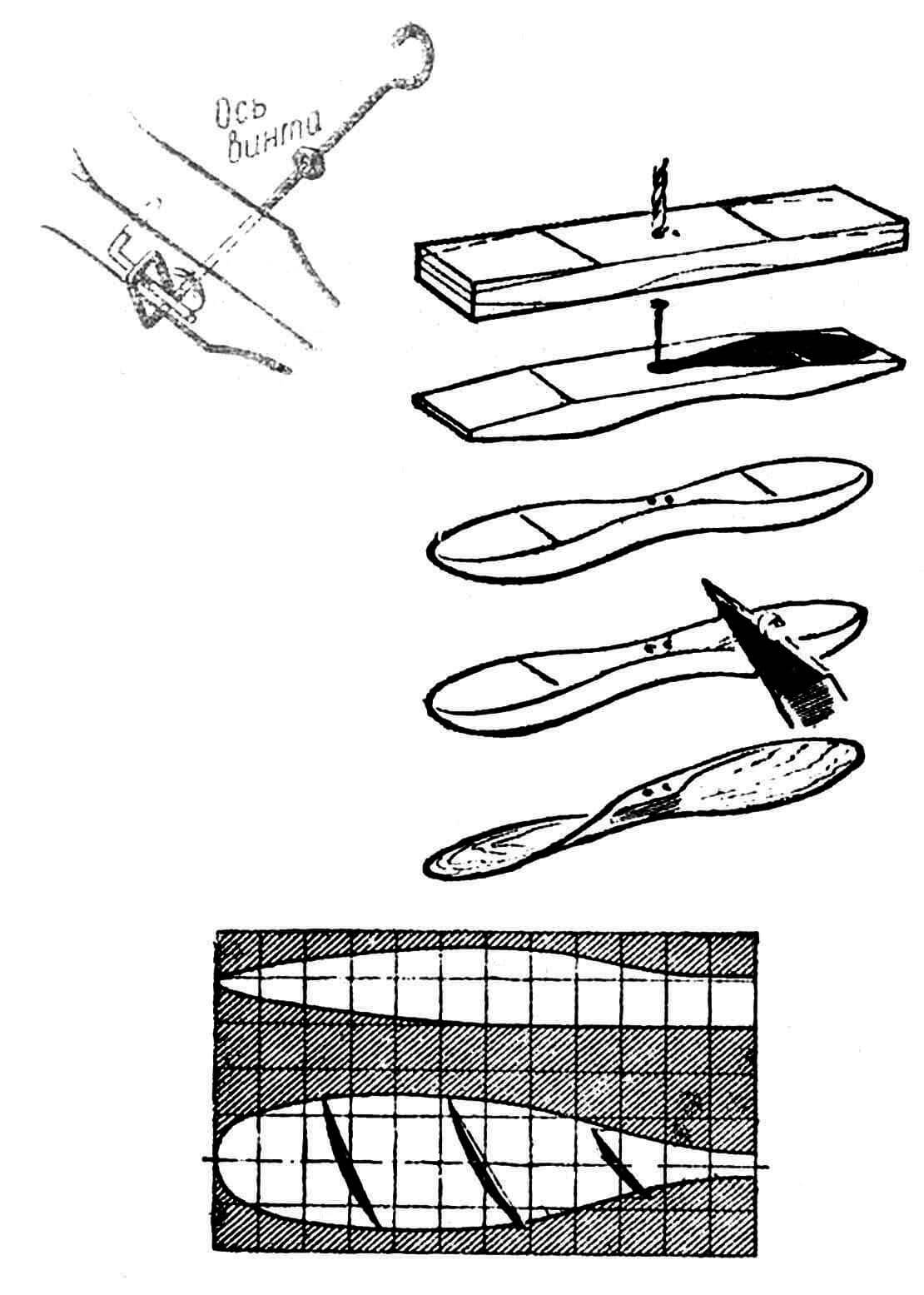
На рисунке 9 даны шаблоны и показан процесс изготовления винта схематической резиномоторной модели. Этот винт рассчитан на модель с размахом крыла около 1 м. Если сравнивать диаметр винтов схематических моделей с диаметром винтов фюзеляжных, то вы увидите, что у первых он в 2—2,5 раза меньше, чем у вторых, при одинаковом размахе крыла. Объясняется это тем, что из-за особенностей обтекания крыла схематических моделей винт большого диаметра (свыше 300 мм) будет работать с очень низким к.п.д.
Процесс изготовления винта состоит из следующих операций:
а) По чертежу вырезают из тонкой фанеры, картона или целлулоида шаблоны.
б) Из липовой или березовой доски выпиливают и остругивают заготовку винта, высота, ширина и длина которой должны соответствовать высоте, ширине и диаметру винта.
в) С помощью шаблонов переносят виды спереди и сбоку на заготовку и сверлят в ней два отверстия диаметром 1,5 мм.
г) Обрабатывают заготовку по разметке вида сбоку, а затем сверху (линии вида спереди, которые состругиваются при обработке по разметке вида сбоку, восстанавливаются).
д) Обрабатывают заднюю часть болванки. Материал состругивается ножом очень аккуратно, иначе он может сколоться.
е) Обрабатывают переднюю часть болванки.
Прикладывая для наглядности линейку к тому или иному поперечному сечению, нужно добиться, чтобы профили сечений были близки к профилям, указанным на рисунке 9. Этот процесс будет выполнен точнее, если вы сделаете шаблоны всех указанных сечений.
ж) Зачищают винт наждачной бумагой.
з) Производят балансировку винта. Отбалансированный винт, насаженный на горизонтальную ось, должен оставаться всегда в том положении, в каком вы его установили. Балансировка осуществляется стачиванием более тяжелей лопасти.
и) Зачищают винт мелкозернистой наждачной бумагой и производят окончательную балансировку.
После изготовления винта его насаживают на ось, форма которой показана на рисунке 9, а во второе отверстие вставляют проволоку Г-образной формы. Необходимо добиться, чтобы они свободно вращались в своих отверстиях. Такая система, называемая «свободным ходом», позволяет винту свободно вращаться на оси под действием набегающего потока после раскручивания резиномотора, что уменьшает лобовое сопротивление модели при планировании.
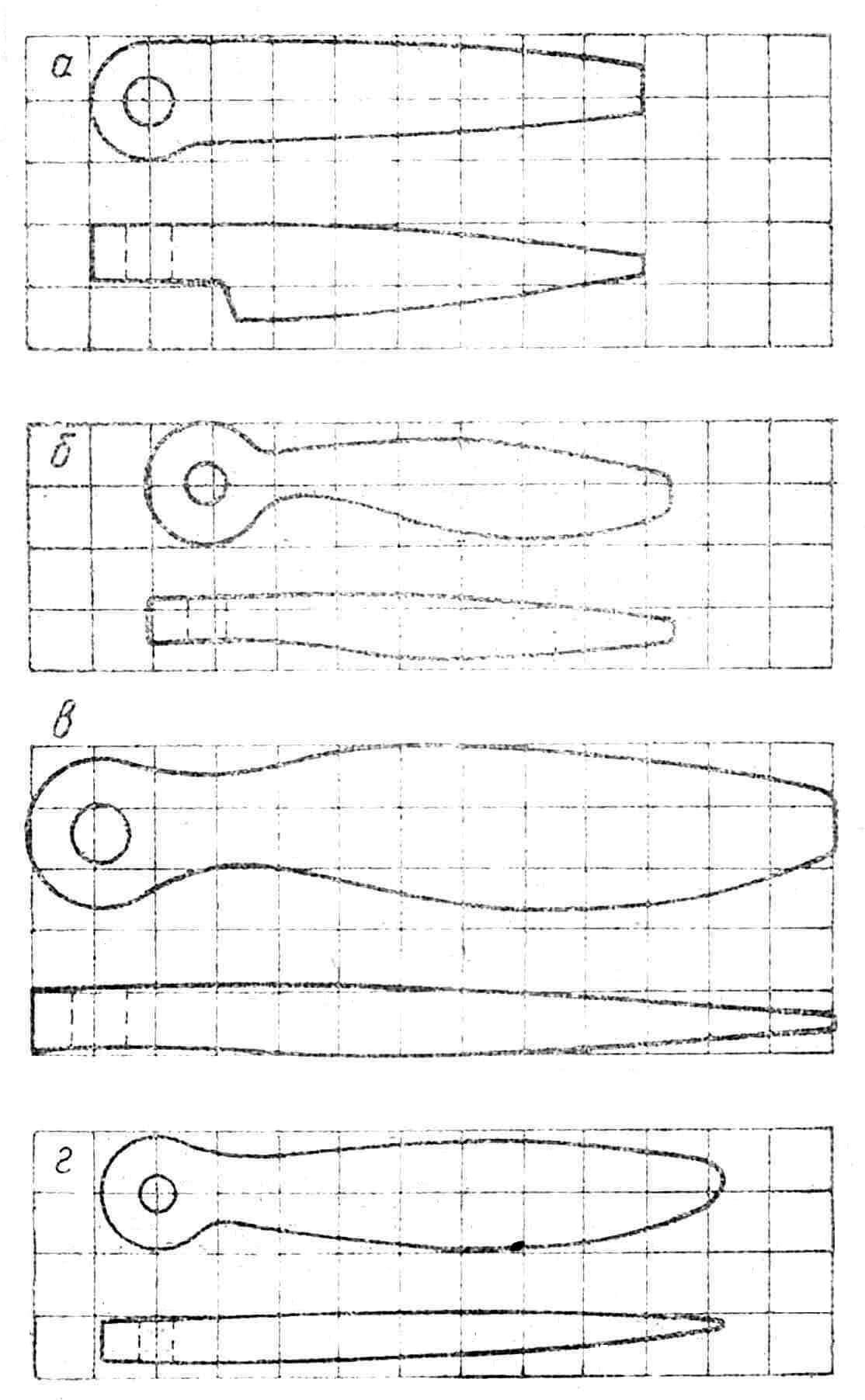
На рисунке 10 приведены шаблоны винта резиномоторной спортивной модели класса № 2. Винты большого диаметра делают складывающимися, так как сопротивление винта свободного хода значительно.
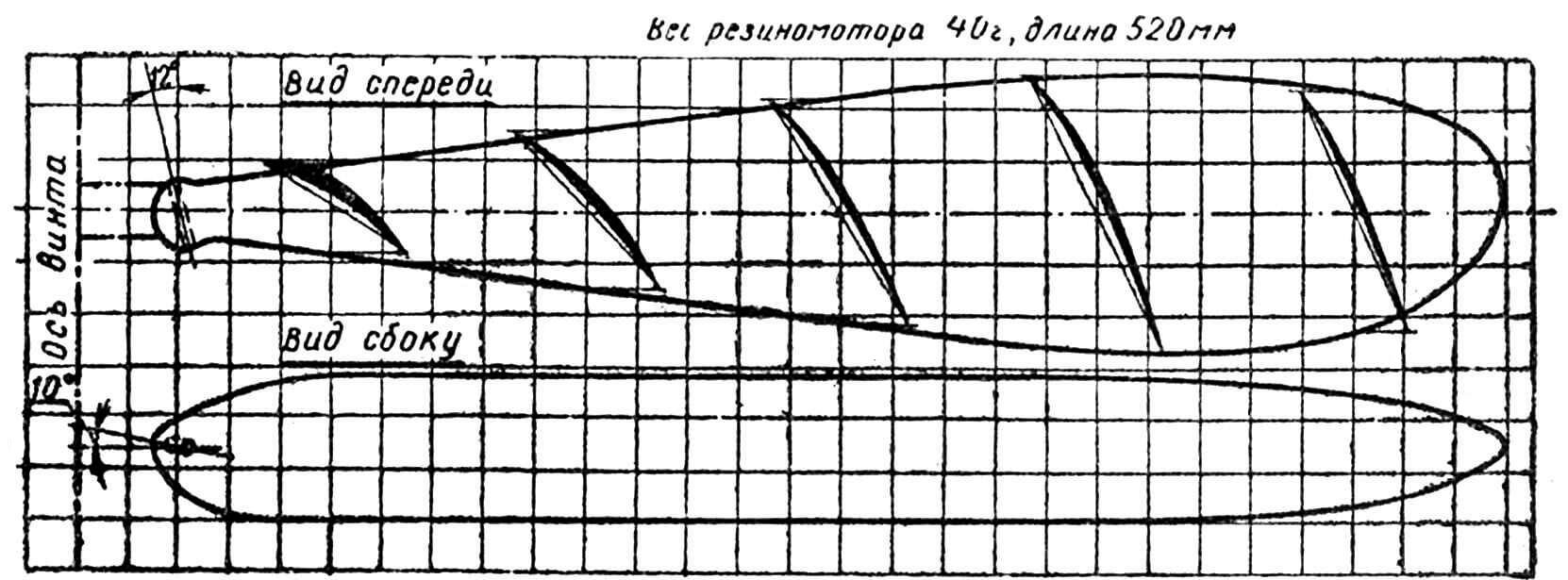
Наиболее приемлемой древесиной для таких винтов является липа. Некоторые моделисты употребляют тополь, единственным преимуществом которого является более легкая обработка. Винт делают из целой болванки. Процесс изготовления его аналогичен описанному выше.
к) После балансировки винт разрезают на 2 половины-лопасти и в них сверлят отверстия под детали ступицы. Для лучшего укладывания лопастей вдоль фюзеляжа внешние детали ступицы несколько наклонены как к плоскости вращения винта, так и к продольной оси его. После сверления отверстий комли лопастей закругляют при помощи ножа и шкурки, а затем покрывают нитролаком пять-шесть раз. Многие моделисты, покрыв лопасть нитролаком один-два раза, обтягивают цветной волокнистой бумагой, а затем наносят на нее еще три-четыре слоя лака.
Важной частью резиномоторной модели является бобышка винта. Конструкция деталей бобышки показана на рисунке 11. Некоторые детали ее вытачиваются на токарном станке.
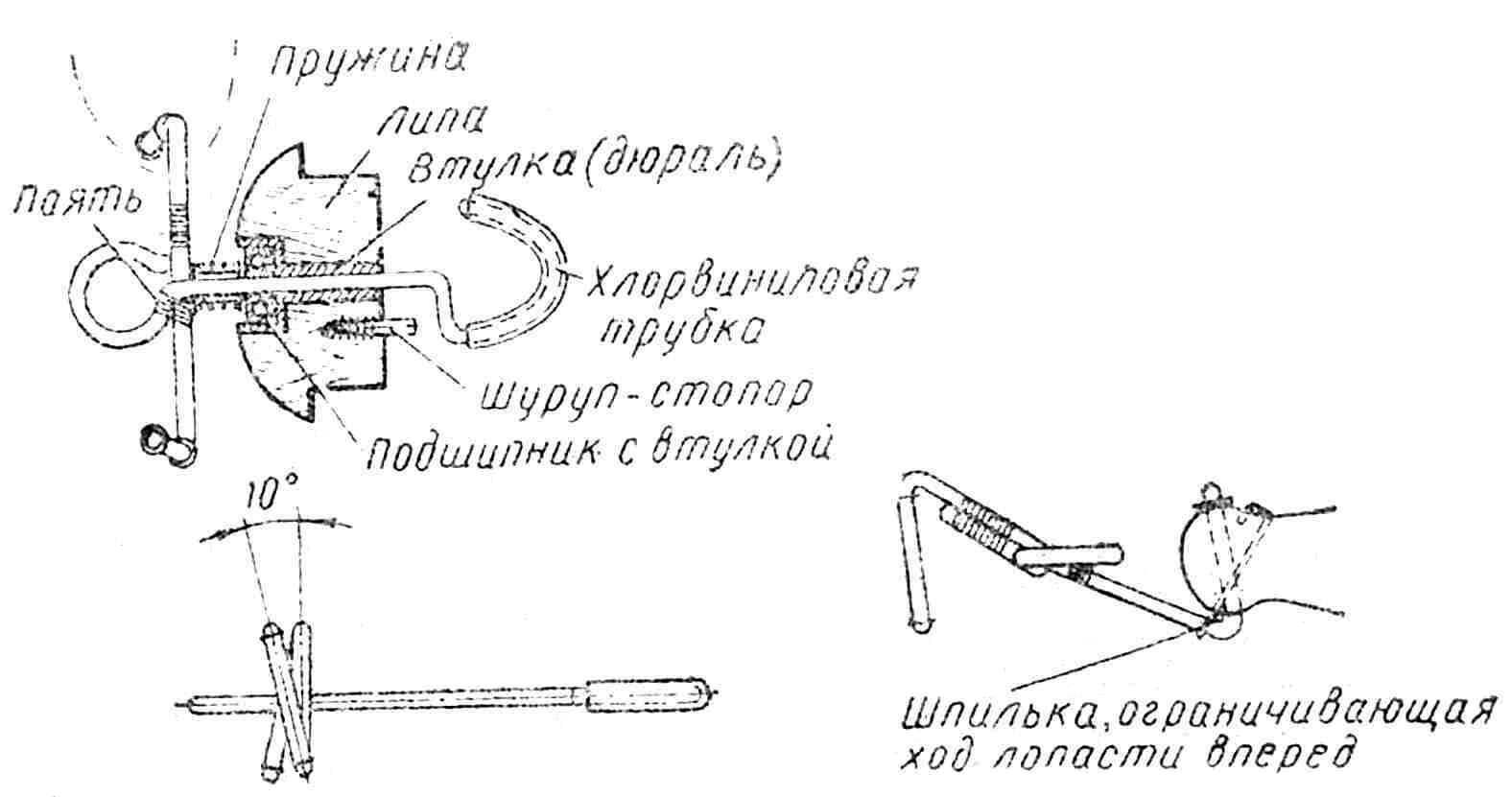
Ось винта и ступицу изготовляют из проволоки ОВС толщиной 2,5 мм. Напильником удаляют лишнюю проволоку, скрепляют их медной проволокой диаметром 0,3 мм и места соединений пропаивают. Перед окончательной сборкой лопасти надевают на ступицу, вал устанавливают в бобышку и еще раз проверяют балансировку винта. После сборки бобышки с осью задний крючок оси загибают и надевают на него для предохранения резины от надрезов хлорвиниловую трубочку, а в бобышку ввертывается стопор, изготовленный из 3-миллиметрового шурупа.
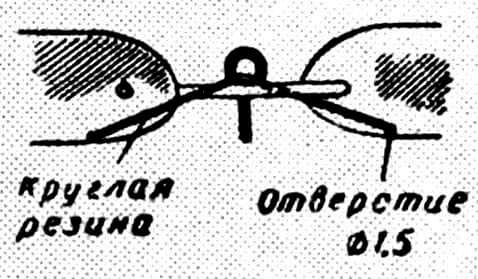
В последнюю очередь на ступице закрепляются лопасти. В отверстия лопасти вставляется круглая резинка, концы которой скрепляются между собой (рис. 12).
Технология изготовления винтов для таймерных и кордовых моделей совершенно аналогична изготовлению винтов для резиномоторных моделей. Все они преимущественно выполняются из древесины твердых пород дерева: граба, бука, яблони и т. д. Шаблоны винтов приведены на рисунке 13. Обрабатывать и профилировать винт по шаблонам следует рашпилем в тисках. После обработки и балансировки винта грубой наждачной бумагой его шлифуют мелкозернистой наждачной бумагой и покрывают четыре-пять раз нитролаком. В случае установки винта на двигатель с калильным зажиганием его дополнительно покрывают антиметаноловым лаком.
Некоторые моделисты делают эти винты ножом.
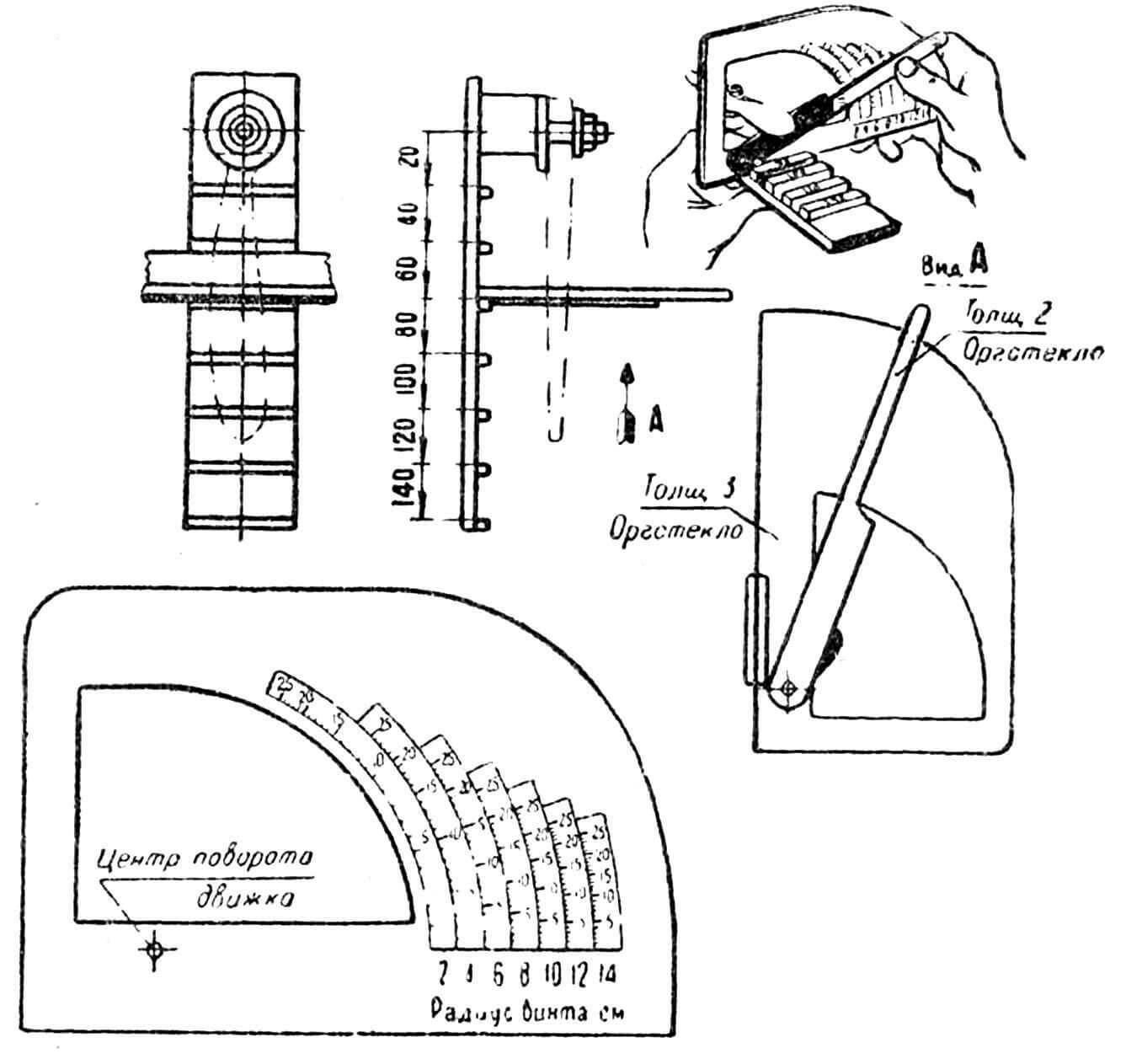
В процессе изготовления винтов кордовых и таймерных моделей опытные моделисты пользуются прибором для проверки шага винта. Чертежи этого прибора и способ пользования им показаны на рисунке 14.
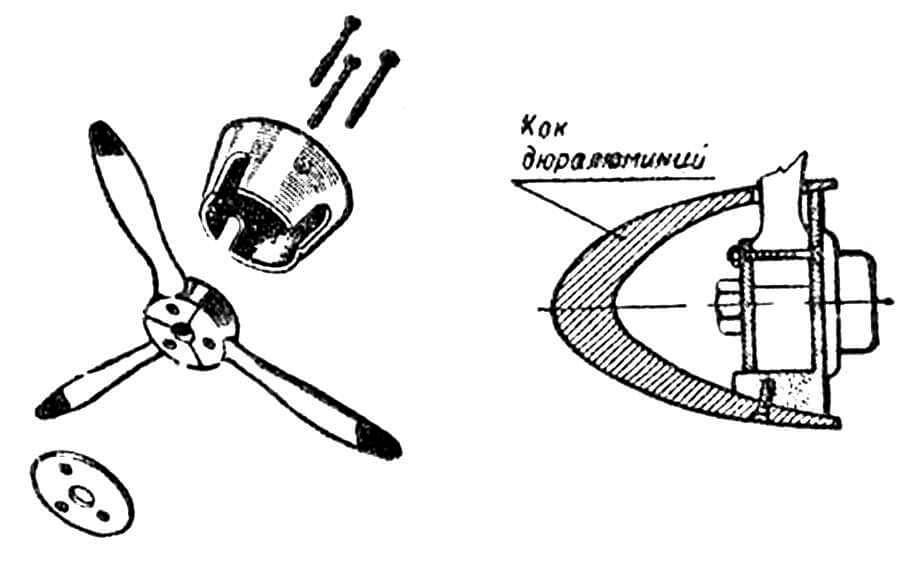
На рисунке 15 показана технология изготовления трехлопастного винта для модели-копии. При разметке его заготовки требуется особая точность, а при изготовлении лопастей необходимо пользоваться прибором для проверки шага.
В. КОЛПАКОВ,
мастер спорта СССР,
Москва
Рекомендуем почитать
 ОПРЕСНЕННАЯ ВОДА
ОПРЕСНЕННАЯ ВОДА
В регионах, где запасы пресной питьевой воды ограничены опреснительные заводы удаляют соль из морской воды, делая ее пресной и пригодной для человеческих нужд. В мире более 13 тысяч... НЕ СТОИТ ВЫБРАСЫВАТЬ
НЕ СТОИТ ВЫБРАСЫВАТЬ
Сломанные кусачки пассатижи ипи плоскогубцы - из этих инструментов можно сделать неплохой разметочный циркуль — надо только срезать на элритроточиле сломанные губки заточить ножки...
