
Ми — давні та постійні передплатники журналу «Моделіст-конструктор». Для нас — втім, як і для всіх тих, хто пов’язав своє життя з технікою,— журнал завжди був свого роду інформаційним джерелом, що постачав цілющу інформацію з питань, що нас цікавлять. А інтереси наші завжди концентрувалися на аматорських надлегких літальних апаратах: ми завжди уважно досліджували новинки самодіяльних авіаконструкторів, і в першу чергу гвинтокрилі машини — автожири та вертольоти.
Щоправда, «Моделісту-конструктору» про таку техніку останніми роками розповідати практично не доводилося. Справа в тому, що самодіяльні авіаконструктори вкрай рідко беруться за створення міні-вертольотів, а тих, що врешті-решт сягають «льотних» зразків, — буквально одиниці. Проте все це не зупинило нас, коли ми все ж таки вирішили взятися за створення спочатку автожиру, а потім і гелікоптера.

На жаль, надійної та досить точної методики розрахунку несучого гвинта нам знайти не вдалося. Тому для початку спроектували стенд для відпрацювання несучих гвинтів-роторів. У процесі виготовлення він ускладнювався, «обростав» механізмами, системами та вузлами — і вийшов гелікоптер НГУ-3, який можна бачити тут на кресленнях і фотографіях. Від стенду залишилася лише назва нашої машини, яка розшифровувалась як «Натурна Вертолітна Установка-3».
Автором проекту вертольота є інженер-технолог С. Комісаров. Чимало сил та часу приділив створенню машини автор цих рядків, керівник авіамодельної лабораторії Станції юних техніків міста Лікіно-Дульово; у роботі брали участь також співробітники та учні лікіно-дулівського технікуму Лі-ДАМТ за цілком доброзичливого ставлення до нашої діяльності керівництва і технікуму, та міської Станції юних техніків.
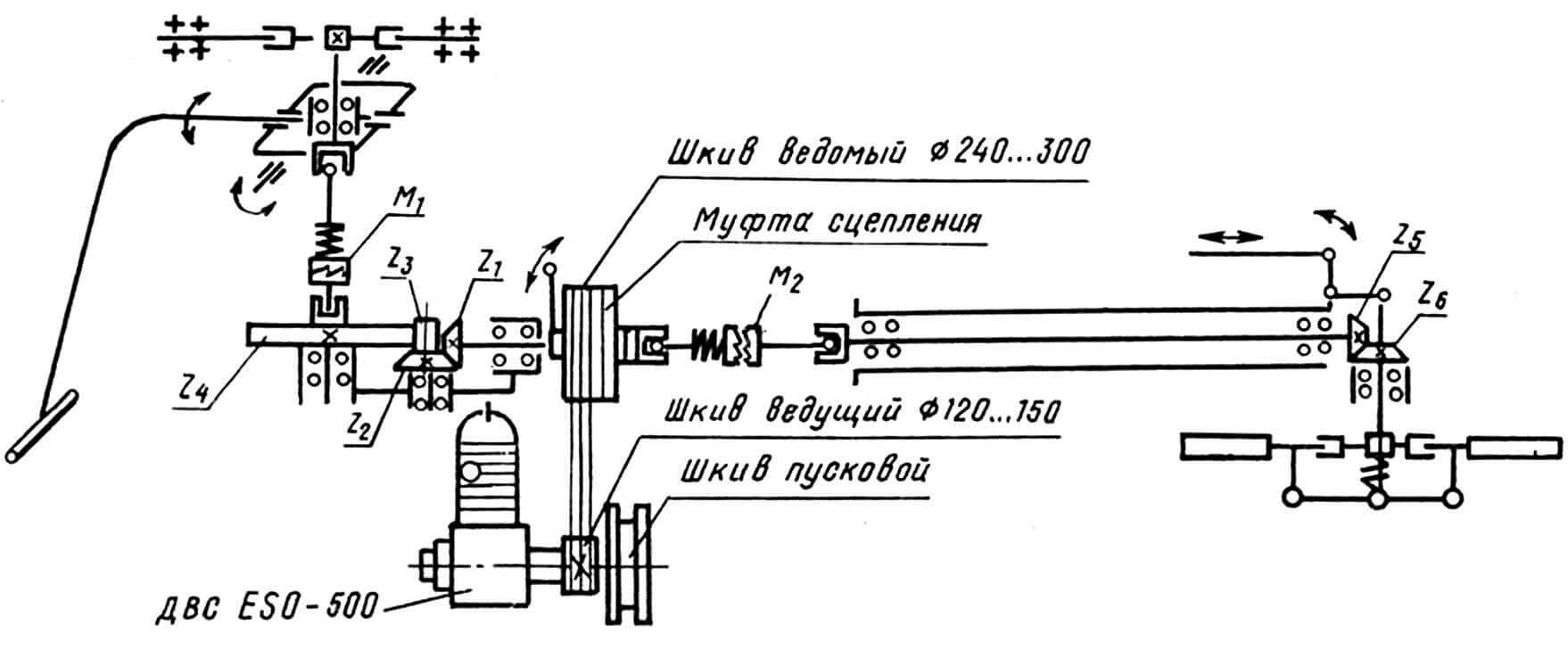
Отже, гелікоптер. Метод проектування ми вибрали найпростіший – його можна назвати статистичним. Інакше кажучи, були вивчені аналогічні гелікоптери такого типу, і на підставі аналізу їх конструкцій з урахуванням параметрів силового агрегату, а також матеріалів і технологій, які ми мали, і був розроблений наш гвинтокрилий апарат. До речі, силовий агрегат — 500-кубовий двигун ESO-500, без якого наша робота навряд чи мала б сенс, подарували нашій групі місцевий меценат, за що величезне йому спасибі.
Більшість агрегатів вертольота зроблена самостійно. Та й «пілотували» машину під час випробувань ми також самі. Вона робила руління по землі, а також з використанням спеціального стенду робила стійкі підльоти на висоту 1…2 метри. Стенд являв собою пристрій типу «колодезний журавель», що виключає розвороти та перекидання вертольота. Управління ним на стенді дозволяло поступово збільшувати кількість ступенів свободи машини і тим самим поступово вдосконалювати навички керування апаратом. Головне тут було — забезпечити безпеку цього процесу, оскільки нікому з нас раніше пілотувати гелікоптер не доводилося.
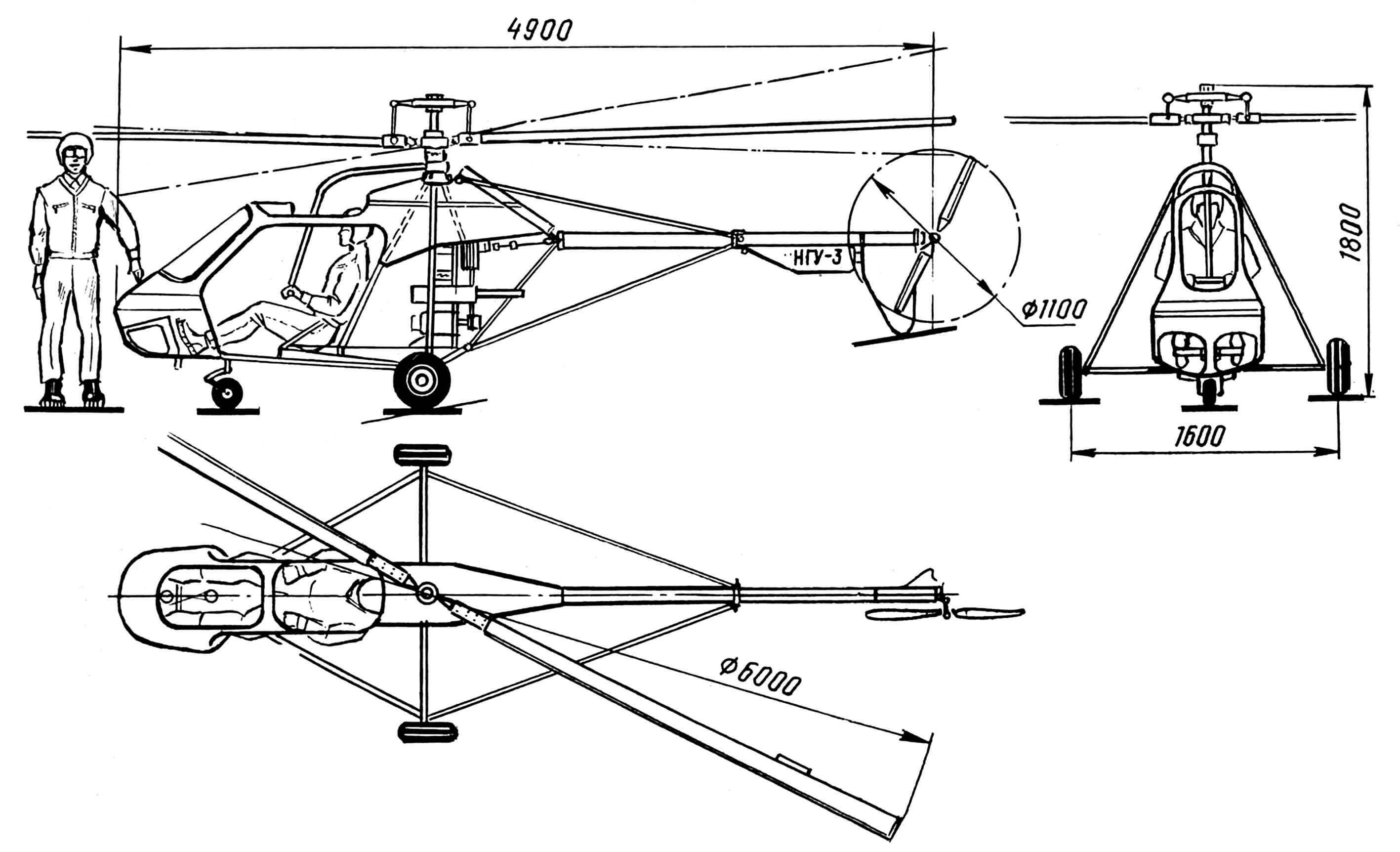
Декілька рядків про технічні характеристики НГУ-3. Так, злітна вага апарата становить 250 кг; діаметр несучого гвинта-ротора – 6 м; профіль лопаті – CLARK-Y – 10%; потужність двигуна – 35 кВт (48 л.с.). Управління ротором – за допомогою ручки типу «крок-газ», зміна напрямку вектора тяги – безпосередня. Автомат кута установки лопат — відцентрового типу, розташований над втулкою несучого гвинта. Апарат суцільнометалевий, зібраний з дюралюмінієвих (Д16Т) профілів (труб, «куточків») та листового матеріалу. Несучі лопаті дерев’яні (ялина), обтягнуті склотканиною з використанням епоксидного сполучного. Комбінований редуктор, відкритого типу. Фрикціон сухого типу, дисковий. Передача крутного моменту – за допомогою карданних шарнірів.
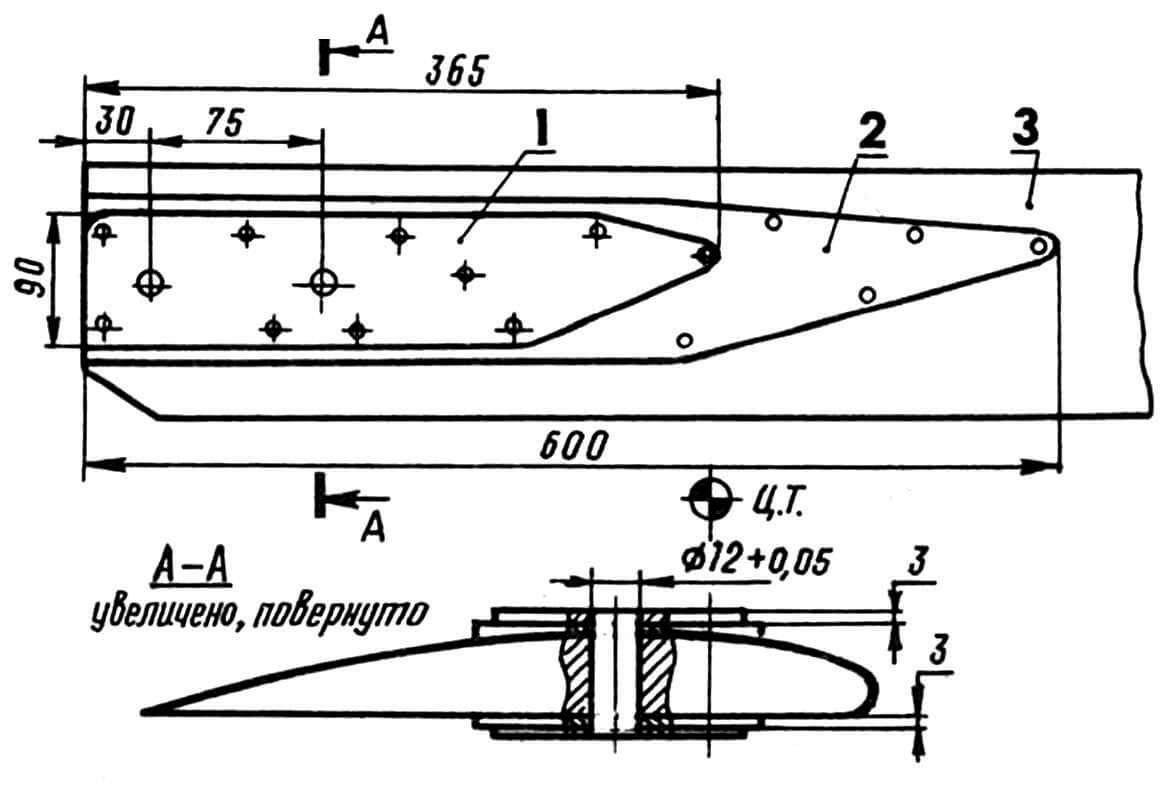
Один комплект лопатей вертольота виготовлявся за технологією, описаною в журналі «Моделіст-конструктор» № 3 за 1970 рік, а інший — за нашою власною, спрощеною, як ми її називали, «музичною».
Було обрано монолітний брус ялини з певною орієнтацією шарів та необхідною структурою. Бруски сушилися в пресі, фугувалися, вимочувалися і знову сушилися в пресі, ще раз фугувалися і фіксувалися лаками, потім профілювалися, фіксувалися лаками і знову доводилися … ), а також тримерний вузол. Далі лопать обклеювалася склотканини з використанням епоксидної смоли, шпаклювалася, полірувалася і фарбувалася. Вдалося навіть отримати негативну крутку кінцевих перерізів лопатей.
Балансування лопатей по профілю виконувалося так, як це рекомендувалося в номері «Моделіста-конструктора», що вже згадувався. Звичайно, такі лопаті виходять досить тяжкими. Однак це все ж таки значно краще, ніж використовувати списані та обрізані лопаті від вертольота Ка-26, як це робить більшість знайомих нам «автожирників».
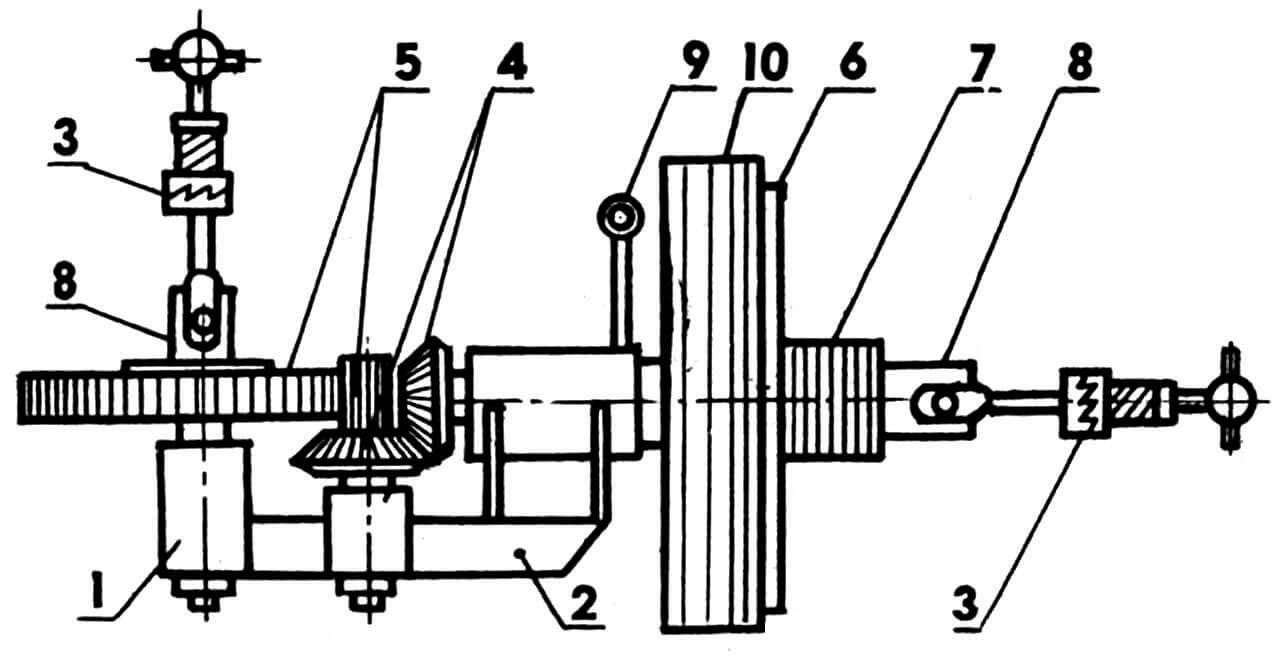
Конструкцію редуктора відкритого типу ми запозичили у радіокерованої моделі гелікоптера і, як показала практика, не помилилися. І взагалі наш вертоліт є, по суті, подібністю такої моделі, а за відсутності вимог до значного ресурсу багато проблем відсівається через простоту конструкції.
Карданна передача виконана подібно до приводу від диференціала до колес на автомобілі «Запорожець». Простіше не придумаєш, якщо знову ж таки не брати до уваги вимоги ресурсу.
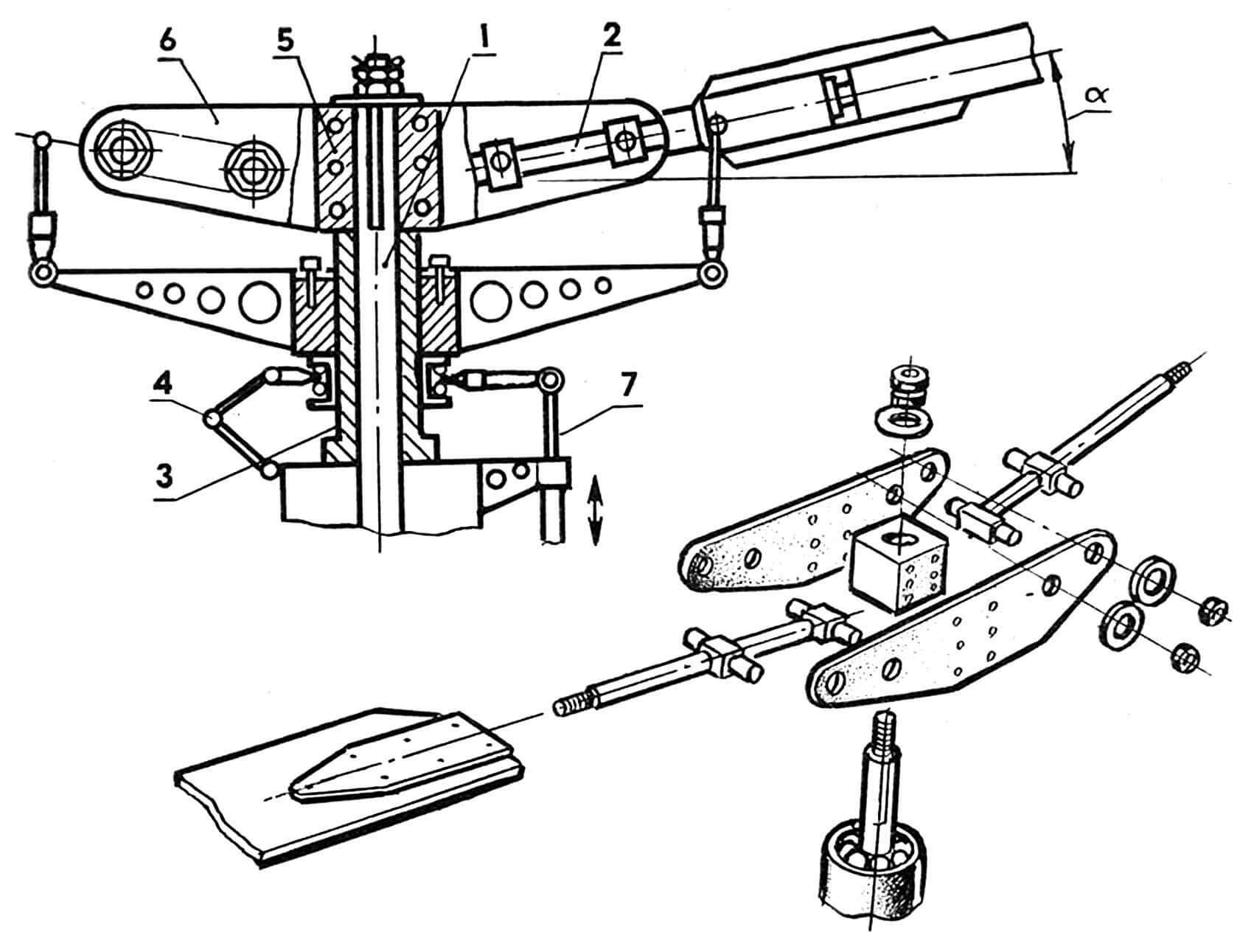
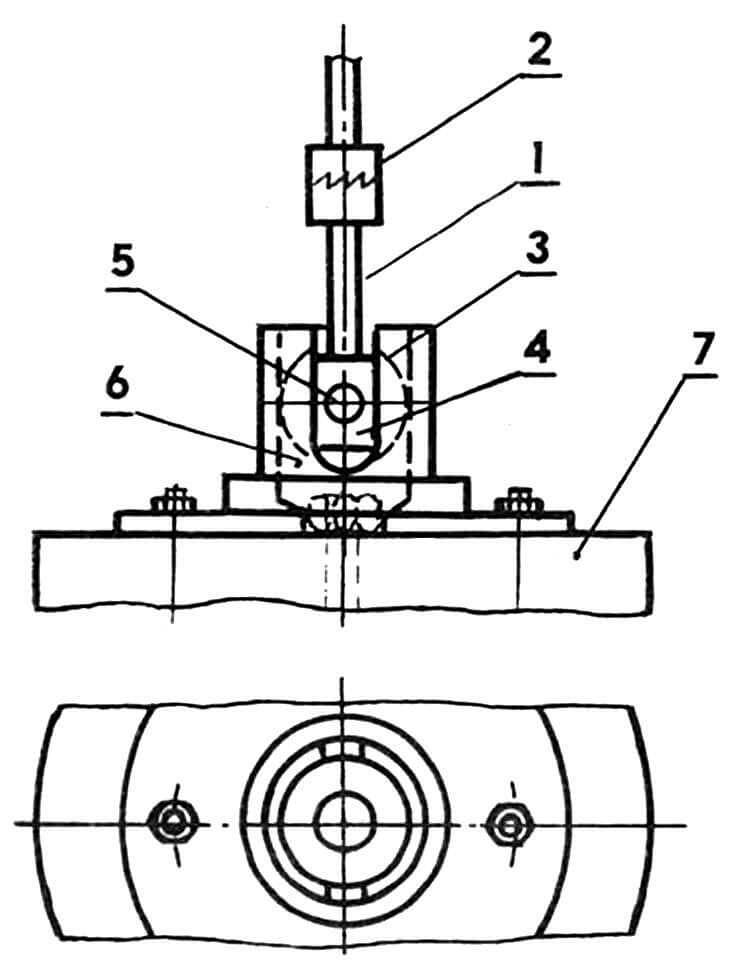
Конструкція втулки гвинта, що несе, разом з горизонтальними шарнірами виглядає досить непоказно. Але вона дозволила забезпечити бажану установку та рознесення лопатей, а також уникнути зварних з’єднань, не здатних забезпечити стабільну міцність.
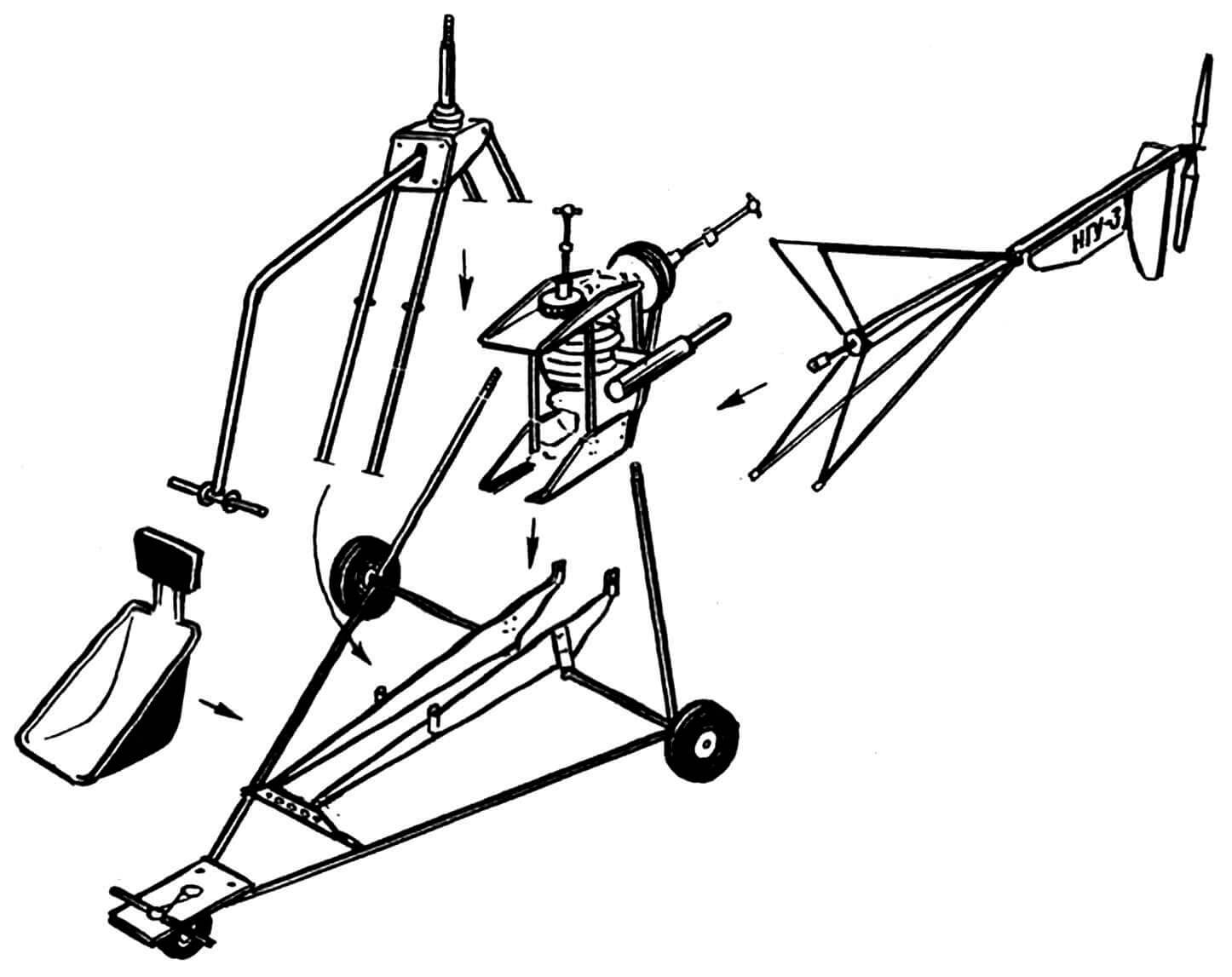
Балка хвостового (кермового) гвинта, милиці та розкоси виконані з дюралюмінієвих (Д16Т) труб. Кінематика приводу кермового гвинта може завдати багато клопоту: довгі вали – це завжди складно. Але ми все ж таки не спокусилися на ремінну передачу і залишилися вірними карданному валу.
Візок шасі (без носової стійки) – від мотодельтаплана. На візку змонтовано дюралюмінієву раму та силовий агрегат. Останній встановлюється на подушці з деревини.
Кінематична схема трансмісії вертольота – це комбінація шківів та зубчастих коліс. Проміжні опори підвалу приводу рульового гвинта встановлені з використанням гумових подушок. Діаметри шківів і передавальні відносини зубчастих передач підбиралися і варіювалися стосовно характеристик несучого і рульового гвинтів, а також параметрів силового агрегату.

Стенд для випробувань вертольота був зварений зі сталевих труб за кресленнями, опублікованими в журналі «Моделіст-конструктор» № 5 за 1983: у цьому номері описувалося пристрій для навчання польотам дельтапланеристів. У нашому випадку ми використовували стенд для забезпечення безпеки в процесі випробування та вироблення навичок пілотування вертольота. Встановлений на ньому гелікоптер може переміщатися вперед, назад, вгору, а також (у невеликих межах) розгортатися під час роботи кермового гвинта. Може змінюватися і кут тангажу за рахунок гасування (закручування) всієї ферми стенду, оскільки вона пласка і не працює на кручення.
Треба сказати, що використання стенду дозволило дати можливість усім будівельникам нашого вертольота набути навичок управління гвинтокрилою машиною, не ризикуючи при цьому єдиним екземпляром літального апарату та власним життям.
Олексій СОРОКІН