На які тільки хитрощі не йдуть рибалки, щоб їм супутнювала удача.
Одного разу мій приятель — великий любитель рибної ловлі, поскаржився, що часто улов виявляється мізерним лише через те, що немає можливості закинути вудку-«донку» в те місце, де, за припущенням, має бути риба: то кущі заважають, то сил не вистачає.
Тоді й народилася ідея: для доставки в рибні місця снастей, а заодно й «бой-ловів» (прикорму у формі кульок) побудувати своєрідний міні-сейнер — невелике радіокероване судно величиною з модель.
Різні радіокеровані судомоделі в продажу є. Але, по-перше, вони недешеві (від тридцяти тисяч рублів), а по-друге, їх все одно потрібно переробляти, пристосовуючи під власні потреби.
Корпус судна вирішено було виготовити з пінопласту, обклеївши його ззовні склотканиною на епоксидному зв’язуючому, — це і дешевше, і простіше, ніж оболонковий корпус з силовим набором.
В якості силової установки — використати електродвигун постійного струму з живленням від малогабаритного акумулятора (двигун внутрішнього згоряння для судна не підходив через велику шумність.)
1 — корпус (пінопласт); 2 — рубка (пінопласт); 3 — кришка рубки (пенополіуретан s10); 4 — кронштейн антени (нержавіюча сталь, лист s1,5); 5 — телескопічна антена (покупне виріб);
6 — акумулятор (покупне виріб); 7 — лівий борт (правий—дзеркально відображений, дюралюміній, лист s1,5, 2 шт.); 8 — кільце гребного гвинта (латунь, лист s1); 9 — кіль (склотекстоліт, лист s2, 2 шт.); 10 — кришка-гірка; 11 — втулка осей борта (дюралюміній, квадрат 6×6, 2 шт.); 12 — платформа з силовим агрегатом та органами управління; 13 — рама: 14 — вимикач живлення (покупне виріб); 15 — кронштейн замикання борта (дюралюміній, лист s1,5); 16 — рушійно-кермовий блок; 17 — сигнальний вогонь
Керування здійснювати по радіо.
Найдешевшою виявилася апаратура пропорційного радіокерування Sanva, що продається в магазинах «Пілотаж». Передавач команд (командоапарат), приймач і дві кермові машинки обійшлися в 4 тис. рублів. До цієї суми додається ще 1300 рублів за реверсивний регулятор ходу фірми «Хайтек». Можна, звичайно, обійтися і без нього, але тоді знадобилася б ще одна кермова машинка для подачі або відключення живлення на електродвигун. Але й вона сильно обмежує можливості судна. Реверсний регулятор ходу дозволяє змінювати швидкість руху плавзасобу (що важливо при підході до місця скидання снастей), а також давати задній хід в умовах маневрування в очеретах або водоростях.
Досить жорсткий пінопласт для корпусу підібрав з викинутої упаковки від побутових приладів. Склотканину та епоксидний клей придбано в магазині будматеріалів.

Електродвигун на 12 В з редуктором — від склопідйомника легкової імпортної автомашини знайшов в гаражі серед запасних частин. Споживаний ним струм був мізерним — всього 150 мА, що обіцяло можливість експлуатувати судничко без підзарядки акумуляторів за всю риболовлю. Обороти на вихідному валу редуктора були невеликі, і це спонукало до того, щоб зробити судничко з колісними лопатевими рушіями — за типом старовинних пароплавів, що надавало йому своєрідний вигляд.
Що стосується механізму скидання вудок та прикорму, то перше, що спало на думку, — зробити над палубою двосхилу гірку з уклонами в бік бортів, прикривши її фальшбортами. Таке рішення дозволяло завантажувати на міні-сейнер одразу дві вудки — по одній в відсік кожного борта і скидати їх автономно відкриттям фальшборта.
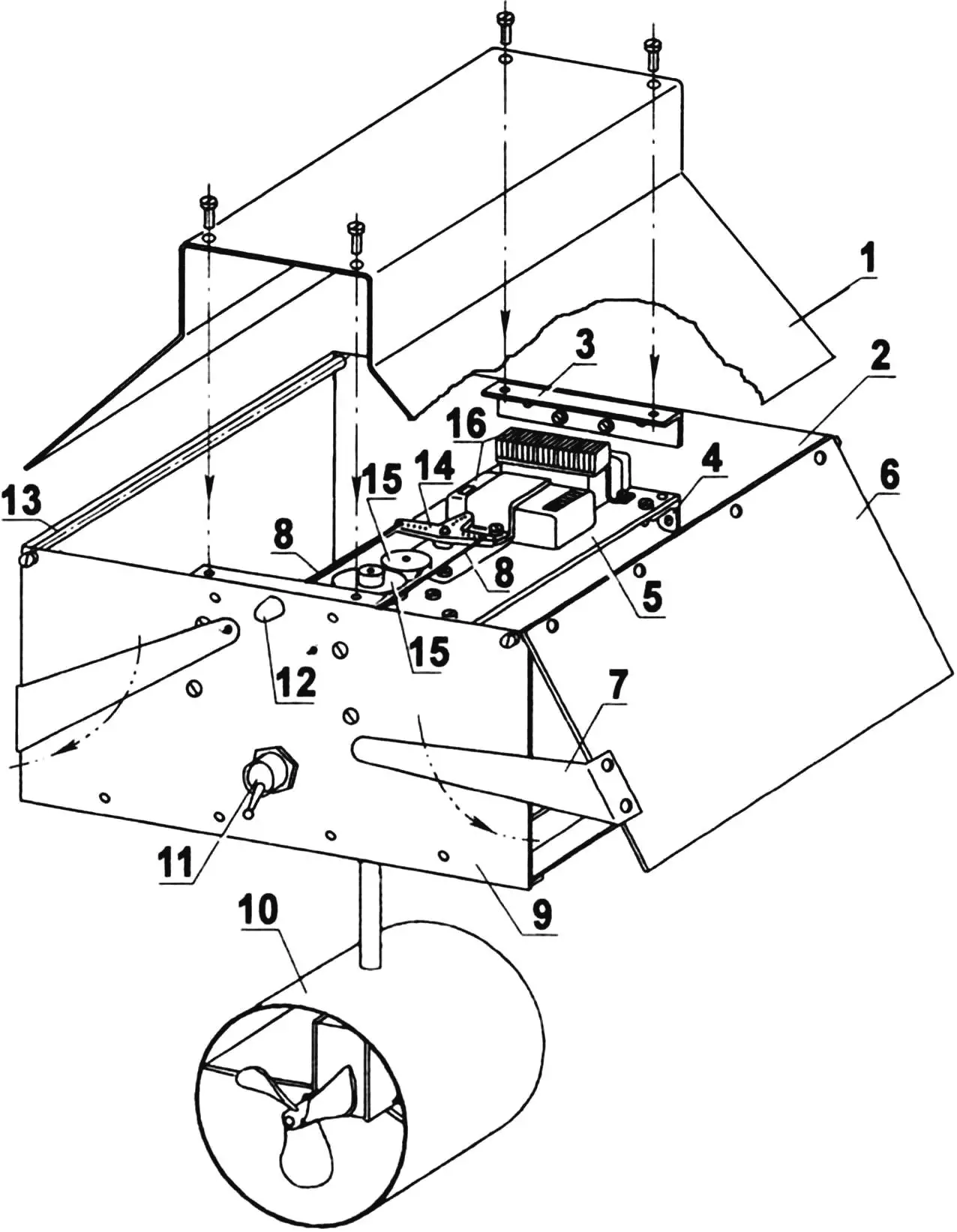
1 — кришка-гірка; 2 — передня стінка; 3 — опорний кронштейн кришки-гірки; 4 — кутовий кронштейн кріплення платформи; 5 — платформа; 6 — борт; 7 — кронштейн відкривання-замикання борта; 8 — тяги відмикання бортів; 9 — задня стінка; 10 — рушійно-кермовий блок; 11 — тумблер; 12 — сигнальний вогонь; 13 — втулка осей борта; 14 — качалка машинки відкривання бортів; 15 — шестерні понижуючого передавального механізму; 16 — приймач команд
При такому компонуванні електродвигун, кермові машинки (керування поворотно-гвинтовою колонкою та відкривання фальшбортів), акумулятори були розміщені в трюмі корпусу. Для видимості міні-сейнера в темряві на носі та в кормі були встановлені мигаючі світлодіоди.
Однак ходові випробування показали, що перший млинець виявився грудкою: судничко рухалося мляво — проти течії пливло з великими труднощами і його навіть зносило вітром та течією. До того ж через осі коліс в трюм надходила вода, яка вивела з ладу електродвигун і ледь не згубила кермові машинки. Зате механізм скидання вудок та прикорму виявився ефективним і працював бездоганно.
Висновок напрошувався невтішний: потрібні інша компонування виконавчих механізмів, високооборотний силовий агрегат та інший рушій — не дарма ж наші предки давно замінили лопатеві колеса на гребний гвинт.
Для нового міні-сейнера придбав електродвигун «Spid-500» (вартістю 500 руб.), що працює від напруги 6 В, а для нього — і свинцево-кислотний акумулятор (вартістю 400 руб.). Габарити акумулятора досить значні: довжина х ширина х висота — 150x150x100 мм, та й маса близько 1,5 кг. Зате його ємності з лихвою вистачить на всю риболовлю.
Знову постало питання про компонування судничка. Класична схема передачі обертового моменту від електродвигуна через редуктор та похилий валопровід до гвинта простягалася б майже по всій довжині міні-сейнера, а тому відпала сама собою — для габаритного та важкого акумулятора місця всередині корпусу не залишалося, тим більше що його треба було розмістити якнайнижче та посередині судничка. Але вихід все ж таки знайшовся — була використана досить рідко застосовувана схема передачі обертання від двигуна до гвинта через вертикальний вал та кутовий редуктор (поворотно-гвинтову колонку або інакше — рушійно-кермовий блок). При цьому всі основні деталі та механізми радіокерованого міні-сейнера: електродвигун, кермові машинки та поворотно-гвинтова колонка змонтовані на одній платформі — склотекстолітовій смузі товщиною 3 мм (можна використати і дюралюмінієву товщиною 1,5 — 2 мм).
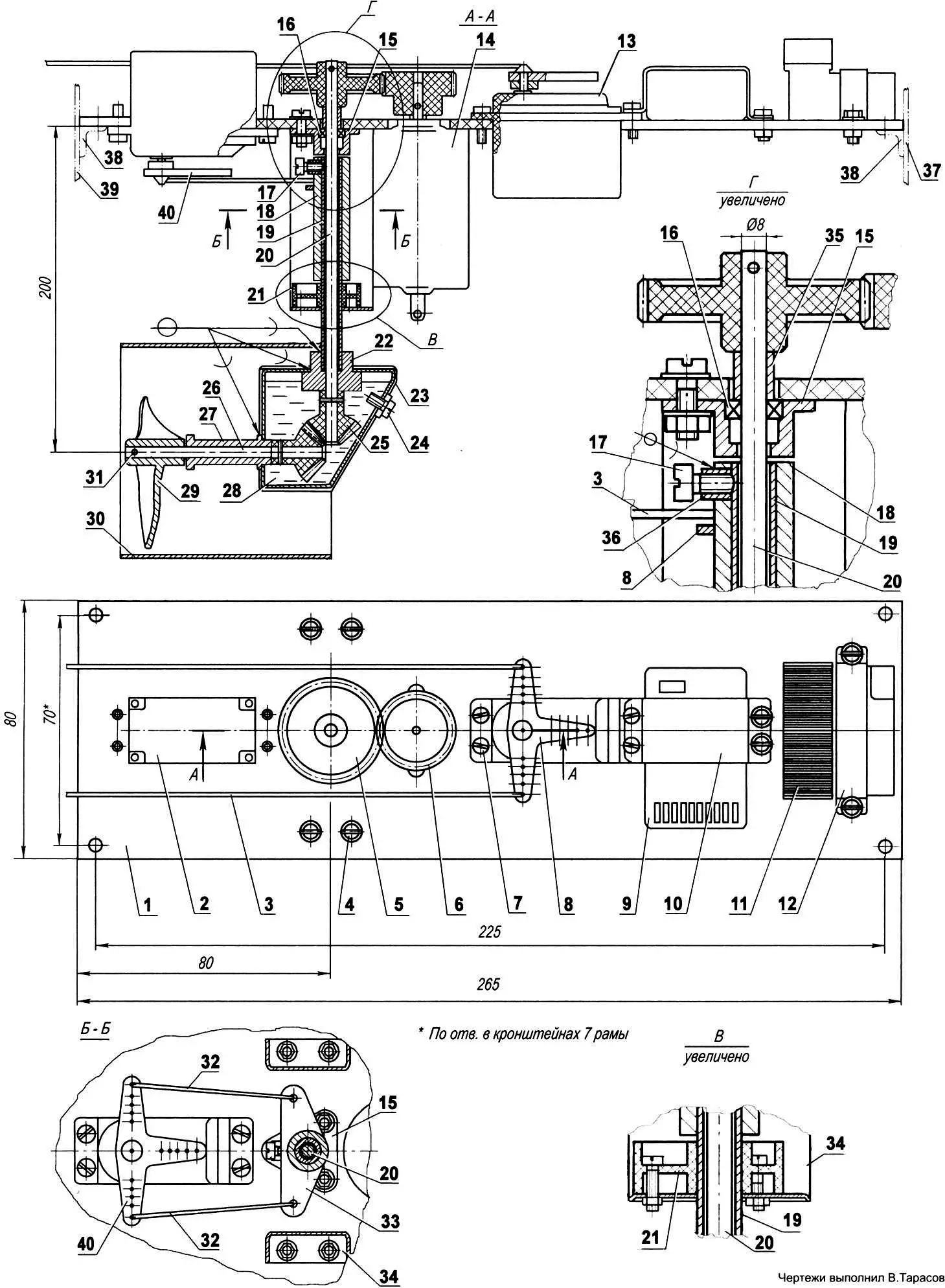
1 — платформа (гетинаксова пластина s3); 2 — кермова машинка гвинторулевої колонки —кермо повороту (покупне виріб); 3 — тяга відмикання бортів (дріт ОВС Ø1,0,2 шт.); 4 — болтове кріплення вузла (болт М3, гайка М3, шайба, 8 компл.); 5 — ведена шестерня вала колонки (капрон z = 38, від картриджа ксерокса); 6 — ведуча косозуба шестерня вала електродвигуна (капрон, z = 18, від картриджа ксерокса); 7 — гвинтове кріплення вузла (гвинт М3, 8 компл.); 8 — качалка машинки відкривання бортів (покупне виріб); 9 — приймач (покупне виріб); 10 — скоба кріплення приймача та платформа (дюралюміній, лист s1); 11 — реверсивний регулятор оборотів двигуна (покупне виріб); 12 — скоба кріплення регулятора до платформи (дюралюміній, лист s1); 13 — машинка відкривання бортів (покупне виріб); 14 — електродвигун (Spid 500, n = 9000 об/хв, N = 100 Вт, покупне виріб); 15 — корпус підшипника (бронза); 16 — кульковий підшипник 1000095; 17 — стопорний гвинт; 18 — поворотна втулка важеля (дюралюмінієва труба Ø10×1); 19 — штанга колонки (латунна труба Ø8×1); 20 — вал колонки (сталь, круг 5); 21 — підшипник ковзання штанги (капрон); 22 — підшипник ковзання вала (бронза); 23 — корпус редуктора (латунь, лист s1); 24 — пробка корпусу редуктора (гвинт М3 з капроновою шайбою); 25 — конічна шестерня редуктора (капрон, від картриджа ксерокса, 2 шт.); 26 — вал гребного гвинта (нержавіюча сталь, круг 5); 27 — втулка вала гребного гвинта (бронза); 28 — мастило (літол); 29 — гребний гвинт (латунь, лист s1); 30 — кільце (латунь, лист s1); 31 — штифт (дріт ОВС, Ø2, 5 шт.); 32 — тяги машинки повороту колонки (дріт ОВС Ø1, 2 шт.); 33 — качалка поворотної колонки (нержавіюча сталь, лист s2); 34 — скоба встановлення вузла поворотної колонки до платформи (нержавіюча сталь, лист s1); 35 — упорна втулка; 36 — різьбова втулка; 37 — передня стінка; 38 — кутовий кронштейн кріплення платформи (2 шт.); 39 — задня стінка; 40 — качалка машинки повороту колонки
Посадкові місця під кермові машинки та електродвигун випилюються лобзиком з пилкою по металу або по периметру свердлять отвори і потім обробляють їх напилком. Кріпильні отвори виконуються як зазвичай — відповідним свердлом та метчиком.
Кріплення до платформи деталей механізмів та пристроїв, що не мають своїх кріпильних отворів, здійснено за допомогою скоб, виконаних з дюралюмінієвого листа товщиною 1 мм, гвинтами або болтами М3.
При компонуванні на платформі деталей та механізмів необхідно точно узгодити відстані між центрами валів електродвигуна та колонки з діаметрами веденої та ведучої шестерень. При цьому деталі колонки не повинні стикатися з корпусом електродвигуна. Шестерні я взяв від старого принтера та його картриджів. Вони капронові, циліндричні, косозубі. Бажане зниження оборотів на цьому ступені — в 2 — 3 рази. Але це не критично. Двигун високооборотний, а знижувати обороти можна до нуля і за допомогою регулятора від радіокерування.
Колонка складається з вертикального вала, встановленого в двох підшипниках: верхньому — кочення та нижньому — ковзання. Строго кажучи, в нижньому підшипнику встановлений не сам вал, а надіта на нього трубчаста штанга. На штангу ж надіта ще розпірна втулка з качалкою та фіксується на ній стопорним гвинтом. Цей же гвинт регулює (обмежує) кут повороту колонки. Для кріплення колонки до платформи використовується П-подібна (але перевернута) скоба, на полицю якої і встановлюється нижній підшипник ковзання.
Нижній кінець вала проведений через ще один підшипник ковзання (бронзовий). В нього ж вставлена і штанга. Але для штанги підшипник служить наконечником, оскільки деталі припаюються одна до іншої. Згодом до цього ж наконечника припаюється і корпус кутового редуктора, а до штанги — кільце гвинта.
Треба відзначити, що кільце було встановлено пізніше, після однієї з риболовель, на якій на гвинт намоталися водорості і міні-сейнер з труднощами вдалося повернути до берега. Після встановлення кільця такого більше не траплялося, а до того ж покращилася керованість судничка.
Кутовий редуктор складається з двох конічних шестерень. В даному випадку вони однакові, капронові і взяті теж від старого принтера (але можна застосувати і різні, використовуючи кутовий редуктор ще й як понижуючий). Одна шестерня насаджена на кінець вертикального вала, а інша — на вал гвинта. На вал гвинта ще надіта бронзова втулка-підшипник і сам гвинт. Шестеренки поміщені в корпус редуктора, спаяний з листової латуні, а корпус заповнений консистентним мастилом.
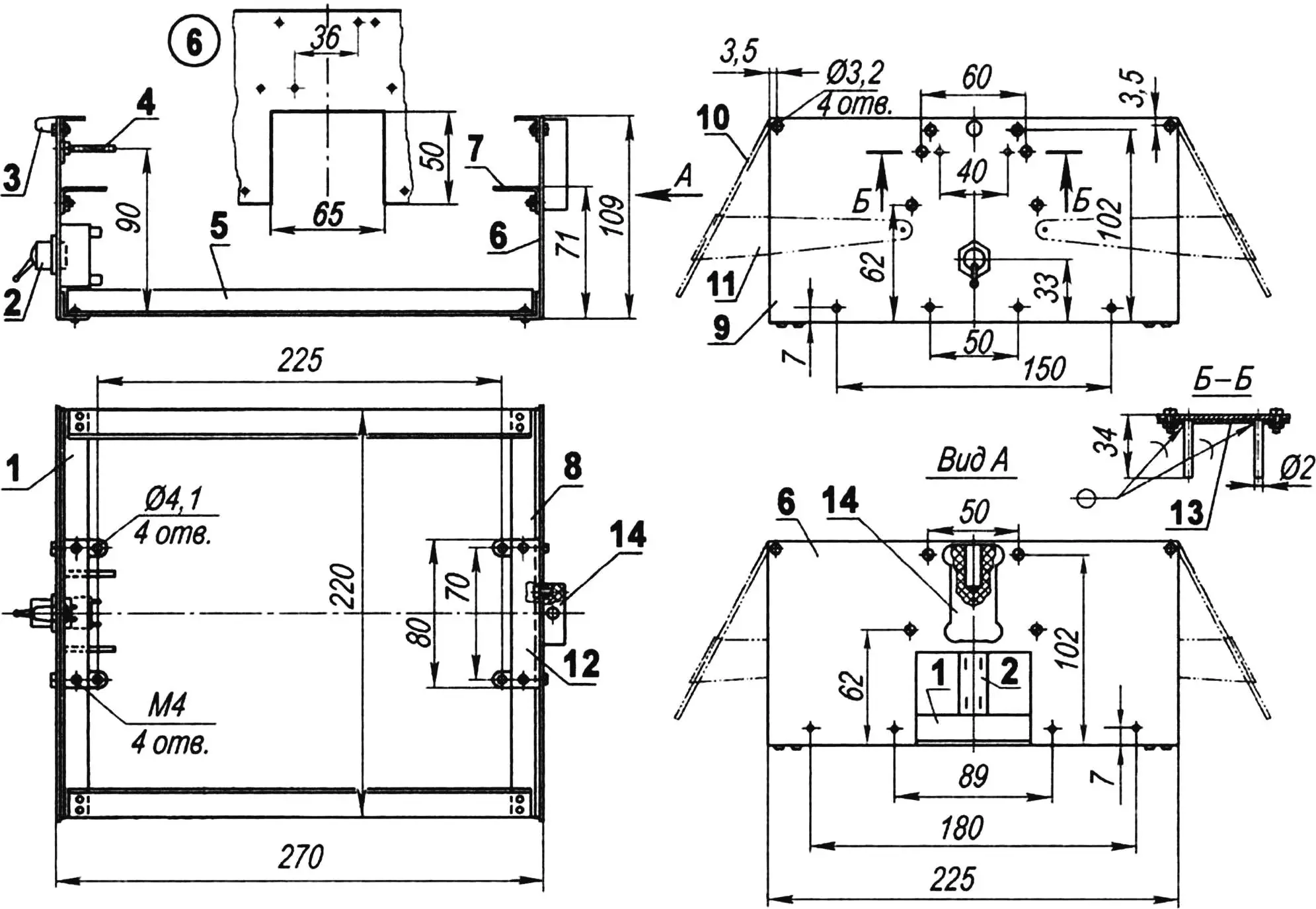
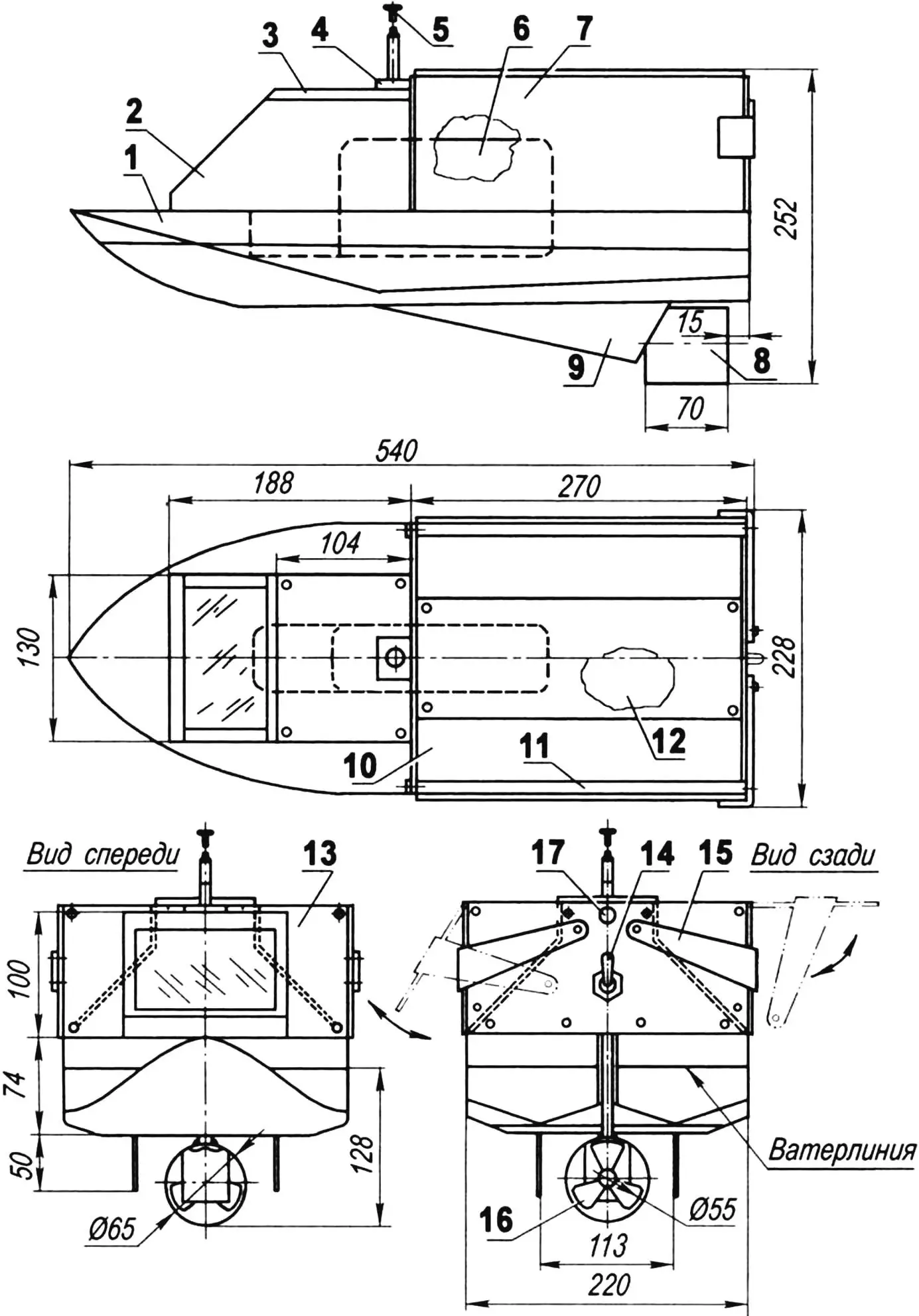
1 — задня поперечина (дюралюмінієвий куточок 15×15); 2 — тумблер вмикання живлення виконавчих пристроїв (покупне виріб); 3 — сигнальний вогонь (світлодіод); 4 — напрямна тяги відкривання-замикання бортів (МН95, труба Ø3×0,5, 2 шт.); 5 — лонжерон (дюралюмінієвий куточок 15×15, 2 шт.); 6 — передня стінка (дюралюміній, лист s1,5); 7 — кутовий кронштейн кріплення платформи (сталевий лист s1, 4 шт.); 8 — передня поперечина (дюралюмінієвий куточок 15×15); 9 — задня стінка (дюралюміній, лист s1,5); 10 — відкриваючийся борт (дюралюміній, лист s1,5, 2 шт.); 11 — кронштейн замикання борта (дюралюміній, лист s1,5, 2 шт.); 12 — кронштейн кришки-гірки (дюралюміній, лист s1,5, 2 шт.); 13 — пластина для припаювання напрямних трубок (латунь, лист s1); 14 — кронштейн антени (гетинакс)
Платформа з виконавчими механізмами монтується на рамі. Рама являє собою дві стінки (передня та задня), скріплені між собою дюралюмінієвими куточками. Через отвори в цих куточках згодом рама кріпиться саморізами до палуби міні-сейнера. В передній стінці зроблено виріз по товщині акумулятора, а в задній виконані отвори під вимикач живлення та тяги відкривання-замикання бортів. Крім того, в обох стінках просвердлені різні кріпильні отвори та отвори під сигнальні вогні — світлодіоди і зсередини прикріплені по два кутових кронштейни — на них і монтується платформа. Зверху платформа закривається кришкою з похилими «крилами»-стінками, які служать схилами двосхилої гірки.
Між передньою та задньою стінками рами шарнірно на осях монтуються поворотні піднімаючіся борти. Підйом бортів може здійснюватися як під дією витих пружин кручення, встановлених на осях (один кінець кожної пружини при цьому закріплюється на борту, а інший — на стінці), так і під дією сили тяжіння скиданих снастей.
Утримання ж бортів в закритому положенні здійснюється тягами кермової машинки відкривання бортів через прикріплені до бортів і заведені за задню стінку кронштейни. Борти відкриваються по команді по черзі, що дозволяє скидати вантаж в різних точках акваторії.
Корпус нового «міні-сейнера», як і першого, виготовлений з твердого пінопласту і обклеєний зверху склотканиною на епоксидному зв’язуючому. Він майже плоскодонний, а тому для кращої стійкості на курсі передбачені два вклеєні кілі зі склопластику. По діаметральній площині приблизно посередині довжини майже до дна в корпусі зроблено вибірку — акумуляторна ніша. Ніша в півтора рази довша за акумулятор — для зручності засування останнього під двосхилу гірку.
В кормовій частині корпусу також по діаметральній площині виконаний неширокий, але сквозний паз під колонку. Сквозний паз, а не отвір зроблено тільки для зручності монтажу (або демонтажу) колонки (або платформи з усіма механізмами в зборі).

Тепер про процес доставки вудок та прикорму до рибних місць. Дві вудки зі звільненими для вільного розмотування спінінговими котушками встановлюються в рогатинках на березі на відстані близько двох метрів одна від одної. Між вудок на воду спускається «міні-сейнер» носом до цілі. На гачки вудок насаджуються «бойли» або інша приманка і вони разом з грузилами заводяться знизу бортів на схил гірки (від кожної вудки на свою) — і борти закриваються. Потім в відсіки засипається потрібна кількість прикорму, вмикається апаратура радіокерування, тумблер бортового живлення і плавним натисканням ручки ходу «вперед» відправляють судничко до рибного місця.

«Міні-сейнер» рухається до цілі, світлодіод мигає, а ліска розмотується і тягнеться слідом. При підході судничка до потрібної точки сповільнюють його хід (аж до зупинки) і дають команду на відкриття борта. По реакції ліски та котушки (вони спочатку теж зупиняються, а потім знову трохи розкручуються) визначають, що стався скид. До речі буде сказати, що збоїв в цьому процесі поки не спостерігалося. Потім відводять «міні-сейнер» до іншої наміченої точки і скидають снасть з протилежного борта. Після цього направляють судничко назад до берега.
На перших же випробуваннях «мінісейнер» перевершив наші очікування і забезпечив успішну риболовлю. При низькому атмосферному тиску, коли риба ні в кого з рибалок поруч не кльовала, ми з приятелем спіймали пару двокілограмових коропів. Згодом таке повторювалося не раз.

При виконанні задач «міні-сейнер» показує впевнений і швидкий хід навіть проти течії, розвертається практично на «п’ятачку», пробирається крізь очерети та водорості.
Відоме перефразування прислів’я: «Риба шукає — де глибше, а людина — де риба» точно застосовується для мого «міні-сейнера».
Щоб знайти таке місце, дообладнав «міні-сейнер» ехолотом. І тепер відкриваю борти вже не по інтуїції, а на тому глибокому місці, на яке вкаже прилад.
«Моделіст-конструктор» № 3’2008, В. ІВАНОВ