Шестеренчатые редукторы, которые можно найти почти в любой машине, надежны, безотказны э работе, удобны. Эти достоинства обеспечили им самое широкое применение. Но от главного их недостатка — ступенчатого регулирования скорости и, следовательно, ограниченного числа передач никуда не уйдешь.
Возьмем, к примеру, автомобиль. Работает двигатель, крутятся колеса, машина движется на самом выгодном режиме. Но вот чуть-чуть приоткрылась дроссельная заслонка, в цилиндры стало поступать больше горючей смеси. Изменения происходят постоянно — ведь шофер все время держит ногу на педали газа. И если бы колеса смогли постоянно приспосаблизаться к этим изменениям, расход горючего был бы минимальным, скорость — оптимальной. Но этого нет из-за ограниченного числа передач. Всего в нескольких случаях из бесконечного множества машина работает на наивыгоднейшем режиме. А чтоб все время было так, число возможных передач следует сделать бесконачно большим, то есть регулировать скорость бесступенчато.
Добиваясь этого, конструкторы поставили на автобус гидравлическую передачу, для прокатного производства придумали регулируемый электродвигатель постоянного тока. Но как быть, к примеру, с маленькими машинами, где двигатель обладает мощностью в 1—1,5 л. с. (или несколько больше)? Это, во-первых, мопеды заводского изготовления и, разумеется, всякие самоделки. Гидравлическую передачу на них не поставишь — сложно, громоздко. Электродвигатель и вовсе тут ни к чему. Выход — в бесступенчатой передаче момента. Механизмы, используемые для этой цели, называются вариаторами.
Разных конструкций вариантов очень много: торевые, шаровые, лобовые, планетарные. Нас интересует вариатор только одного вида — с гибкой ременной связью, схема которого изображена на рисунке 1.
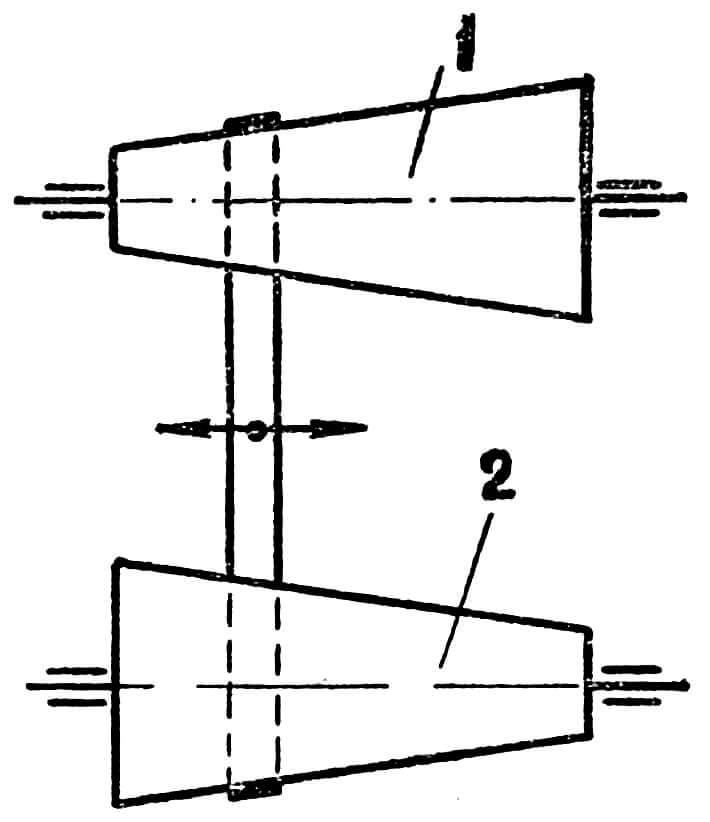
Конус 1 связан с двигателем, конус 2 — с рабочими органами. Ремень передаст вращение. Допустим, установилось определенное передаточное отношение. Ремень сдвинула. Рабочий диаметр ведущего конуса стал больше, ведомого — меньше. Передаточное отношение изменилось. Еще сдвинули — изменилось еще. И так сколько угодно раз ремень сдвигается на сколь угодно малое расстояние. Передаточное число всякий раз меняется, но нерезко. Это и есть бесступенчатая передача.
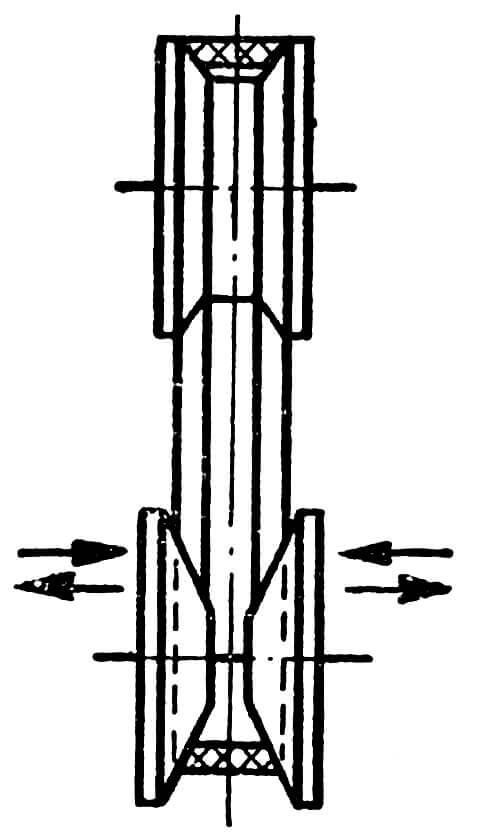
Тот же самый эффект будет, если соединить клиновидным ремнем (рис. 2) два шкива и дать ремню возможность перемещаться вдоль оси, соединяющей шкивы. Если рабочий диаметр верхнего будет увеличиваться, нижнего — уменьшаться, и, таким образом, передаточное число будет бесступенчато меняться. Это и есть клиноременный вариатор, который больше всего подходит для бесступенчатой передачи крутящего момента а маленьких машинах.
Кандидат технических наук Б. А. Пронин в книге «Передачи с бесступенчатым регулированием скорости (вариаторы)» вполне резонно пишет: «Эти передачи наиболее просты по конструкции и выполнимы в любой механической мастерской». Это обнадеживает создателей самодельных конструкций. Кстати, многие зарубежные мопеды и небольшие мотороллеры оснащены клиноременными вариаторами: «Триумф» (Англия); «Харлей-Давидсон» (США); «Сузуки» (Япония) — этот список можно было бы продолжить. Отечественная промышленность пока таких машин не выпускает.
Человеку, который хочет сделать маленький мотоцикл или детский автомобильчик с мощностью двигателя 1—1,5 л. с., безусловно, интересно будет ознакомиться с тем, как работает клиноременный вариатор, применяемый на практике (рис. 3).
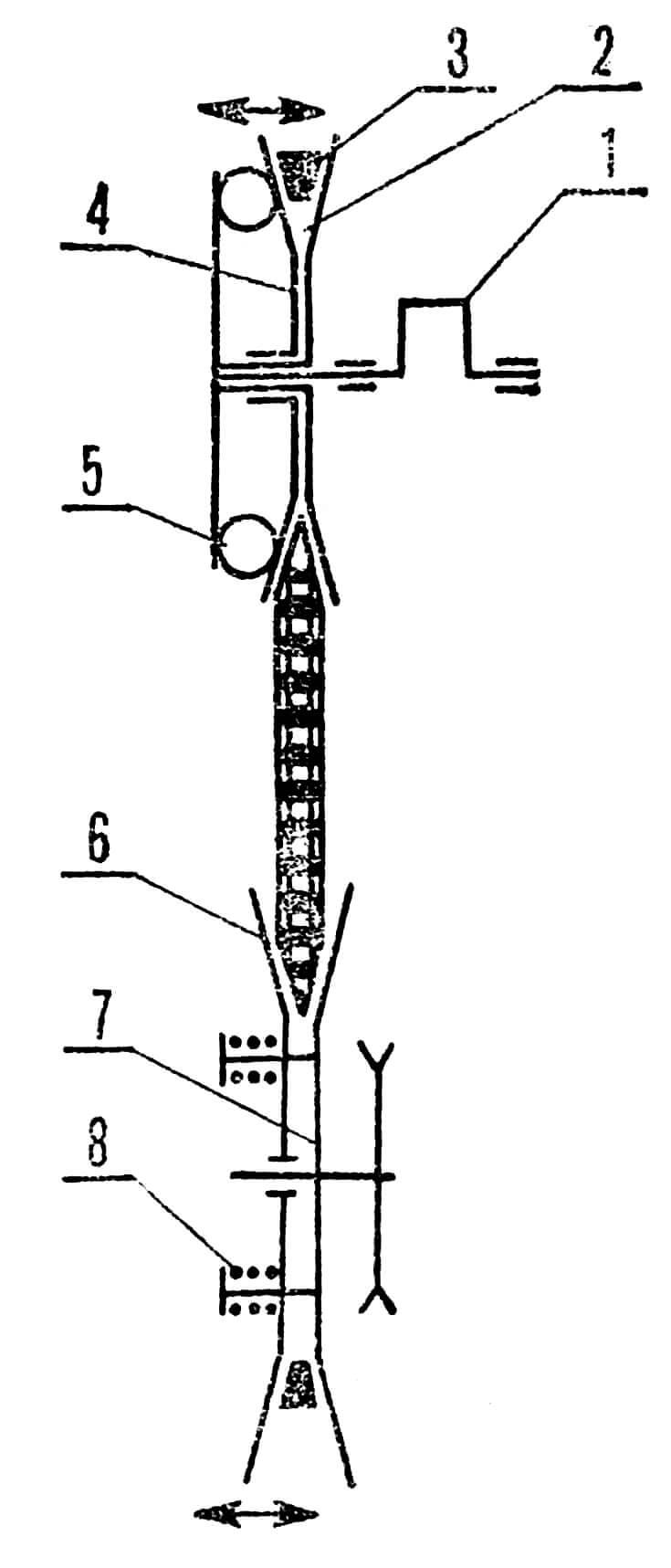
Ведущий шкив, соединенный с коленчатым валом, вращается и вращает клиновой ремень, который передает крутящий момент ведомому шкиву, связанному с колесом. Ведущий шкив состоит из двух дисков — неподвижного 2, связанного с валом 1 двигателя, и подвижного 4, который может перемещаться в осевом направлении. Грузы 5 под действием центробежной силы расходятся, меняют расстояние между дисками и тем самым рабочий диаметр ведущего шкива.
Ведомый шкив тоже состоит из неподвижного диска 7 и подвижного 6, прижатого пружинами 8.
Рассмотрим процесс регулировки. Двигатель только начал работу, коленчатый вал вращается медленно, грузы 5 — внизу, диски верхнего шкива 4 и 2 — раздвинуты, ремень 3 — на самом дне желоба. Диски 6 и 7, наоборот, сжаты пружинами, и ремень — на самой вершине желоба. Наверху рабочий диаметр шкива — наименьший, внизу — наибольший. Передаточное число — максимально. Но вал вращается быстрей и быстрей, грузы расходятся, сжимают диски ведущего шкива, ремень поднимается на больший диаметр; а в ведомом шкиве перемещается к меньшему, отодвигая подвижный диск и сжимая пружины. Передаточное отношение уменьшается. Схема, как видим, проста, но конструктивных ее разновидностей немало. Основные вопросы, которые могут встать перед конструктором: каков вес грузиков! какие ремни можно применять! Отвечаем.
Во французском мопеде фирмы «Пежо» грузиками служат стеклянные шарики диаметром 2,5 мм. Их довольно много — общий вес составляет 51,6 г.
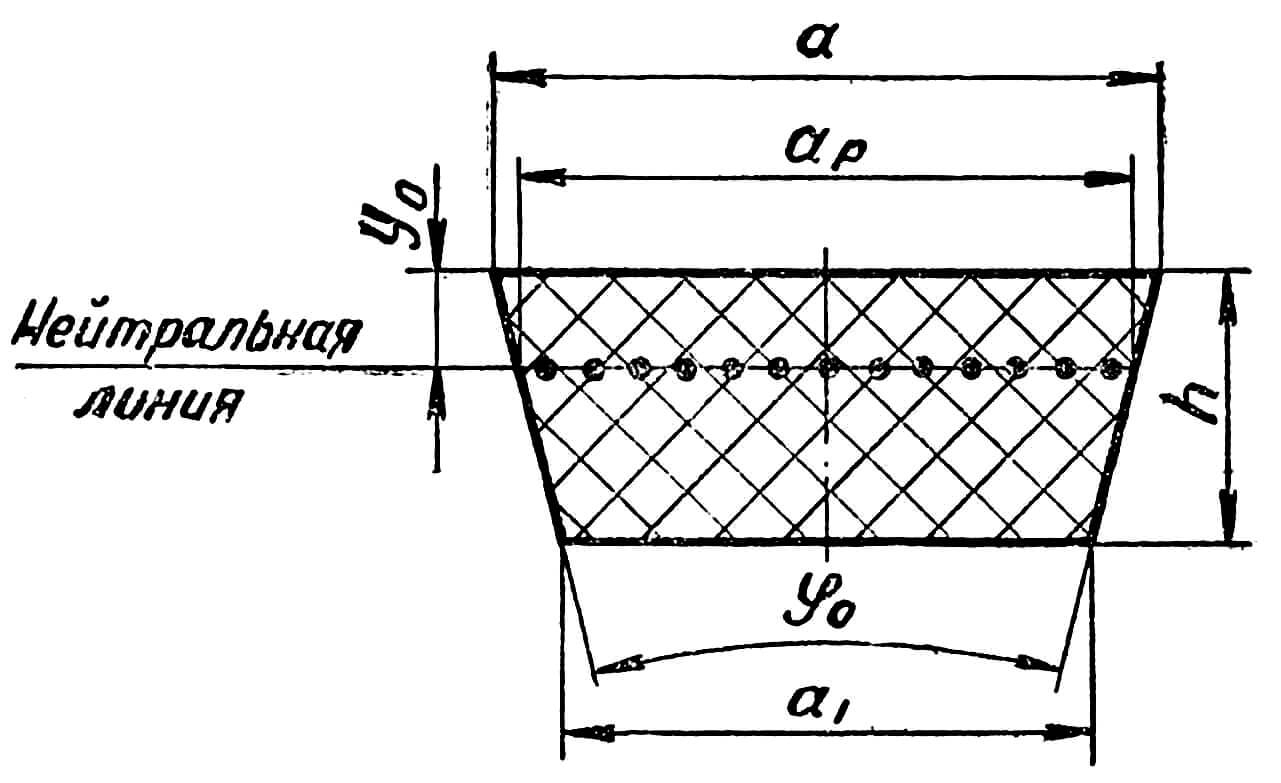
Для клиноременных вариаторов можно использовать стандартные ремни. Размеры их поперечного сечения обусловлены ГОСТом 1284—57. Основные обозначения видны на рисунке 4, а размеры приводятся в таблице. Величина ар — ширина нейтрального слоя при изгибе — является основной. В соответствии с размерами ар делают профилирование канавок шкива. Угол φо равен для всех ремней 40°±1°. Это наилучший угол для того, чтобы ремень не заклинивало в шкиве. Угол канавки шкива лежит в пределах 32—40°. Но диапазон регулирования вариаторов при использовании таких ремней невелик — 1,28—1,68. Для того чтобы его увеличить хотя бы до 3 (этого вполне достаточно для мопедов и маленьких самодельных автомобилей), нужно иметь ремень, увеличенный по ширине, с уменьшенной высотой и углом клина, равным 28—30°. Такие ремни в нашей стране разработаны, хотя промышленностью пока еще не выпускаются.
Но если для настоящей, большой (хоть и самодельной) машины клиноременные вариаторы из-за отсутствия ремней пока построить вряд ли удастся, для детских автомобилей и мопедов вполне можно разрабатывать клиноременную бесступенчатую вариаторную передачу с небольшим диапазоном регулирования. Возможно, этот опыт окажется полезным и тогда, когда можно будет создавать клиноременкые вариаторы с большим диапазоном регулирования.
РАЗМЕРЫ СЕЧЕНИИ СТАНДАРТНЫХ КЛИНОВЫХ РЕМНЕЙ
| Сечение ремней | Размеры и допускаемые отклонения по ГОСТу 1284—57 | Вспомогательные данные | |||||
| ар в мм | h в мм | Площадь сечения F1, в см2 | размеры в мм | ||||
| а | Уо | а1 | |||||
| О | 8,5 | +0,4 | 6 ± 0,3 | 0,47 | 10 | 2,1 | 5,6 |
| -0,3 | |||||||
| A | 11 | +0,6 | 8 ± 0,4 | 0,81 | 13 | 2,8 | 7,2 |
| -0,4 | |||||||
| Б | 14 | +0,7 | 10,5 ± 0,5 | 1,34 | 17 | 4,1 | 9,3 |
| -0,5 | |||||||
| В | 19 | +0,8 | 13,5 ± 0,5 | 2,30 | 22 | 4,8 | 12,2 |
| 0,5 | |||||||
| Г | 27 | +0,9 | 19 ± 0,6 | 4,76 | 32 | 6,0 | 18,2 |
| -0,6 | |||||||
| Д | 32 | +1,0 | 23,5 ± 0,7 | 6,92 | 33 | 8,3 | 20,9 |
| -0,7 | |||||||
| Е | 42 | +1,0 | 30 ± 0,8 | 11,70 | 50 | 11,0 | -28,2 |
| -0,8 | |||||||
Е. МУСЛИН,
инженер
ОТ РЕДАКЦИИ: Если кто-либо из наших читателей осуществит в металле идею бесступенчатого регулирования скорости, мы будем очень рады поместить полное описание его конструкции.
Рекомендуем почитать
 ГАЗ-АА (4X2)
ГАЗ-АА (4X2)
В 1930 году в ряде городов нашей страны начали собирать из импортных агрегатов грузовик «Форд-АА», а после ввода в строй автогиганта в Нижнем Новгороде у «Форда-АА» появился «родственник»—... В ПОЛЕТ — БРОСКОМ
В ПОЛЕТ — БРОСКОМ
Метательные планеры с увлечением конструируют как начинающие, так и опытные авиамоделисты. Привлекает здесь то, что модели из вполне доступных материалов получаются не хуже, чем...