
С каждым годом растет популярность разнообразного транспорта на электротяге — автомобилей, скутеров, велосипедов и самокатов — и за ними, наверное, будущее. Однако пока еще существуют определенные индивидуумы, вроде меня и моего друга-единомышленника Олега Поздеева, которым запах бензина и рокот четырехтактного двигателя как-то ближе и родней новомодных девайсов. И мы далеко не одиноки! Во всяком случае, убедились в этом, представив свой проект под названием «Мегакат» на выставке «Мотовесна-2019» (см. «М-К» № 5-2019). Наше творение вызвало среди мотобратии большой интерес, и теперь я хочу рассказать о нем читателям «М-К».
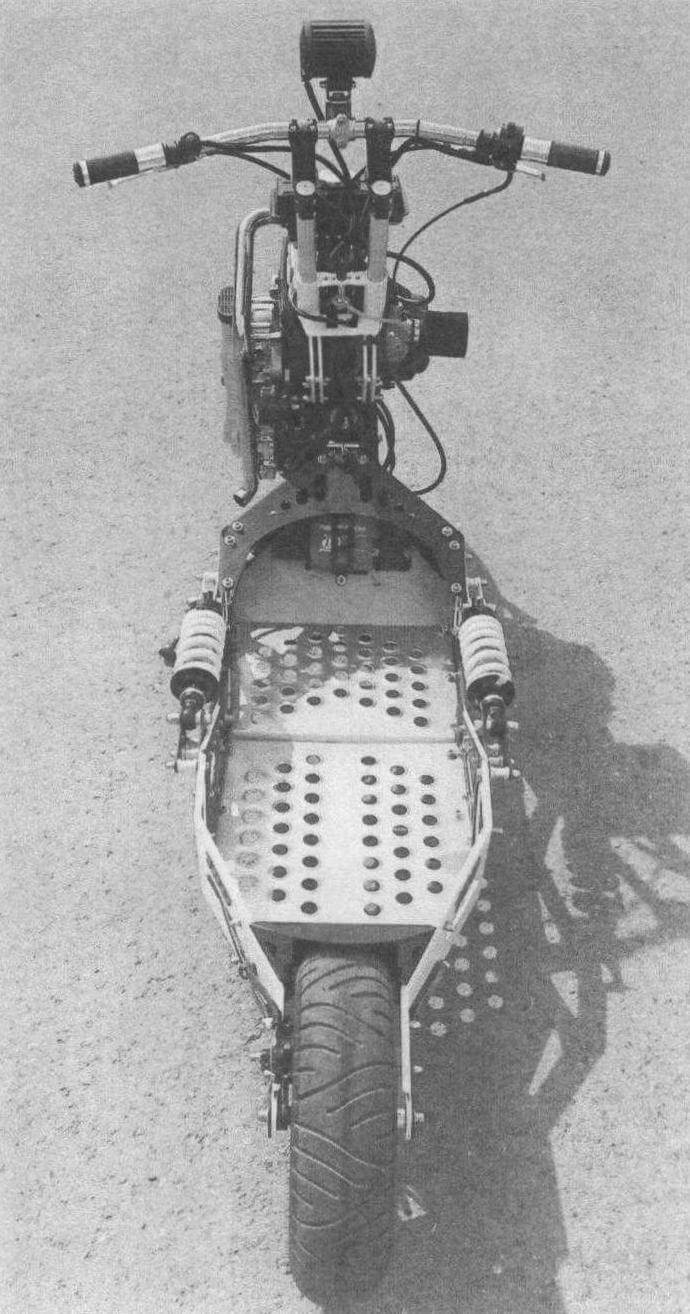
При создании этого мотосамоката основной задачей было проверить на практике сразу несколько технических решений. Впрочем, одну идею стоит выделить, так как на ней и зиждется вся концепция машины. Это так называемая «складывающаяся» рама. В случае с четырехколесной техникой под этим термином обычно понимается конструкция, в которой рама складывается в поперечном направлении для обеспечения управляемости транспортного средства. Тут дело совсем в другом: наша рама «ломается» в вертикальной плоскости, и на этом основан принцип работы подвески.
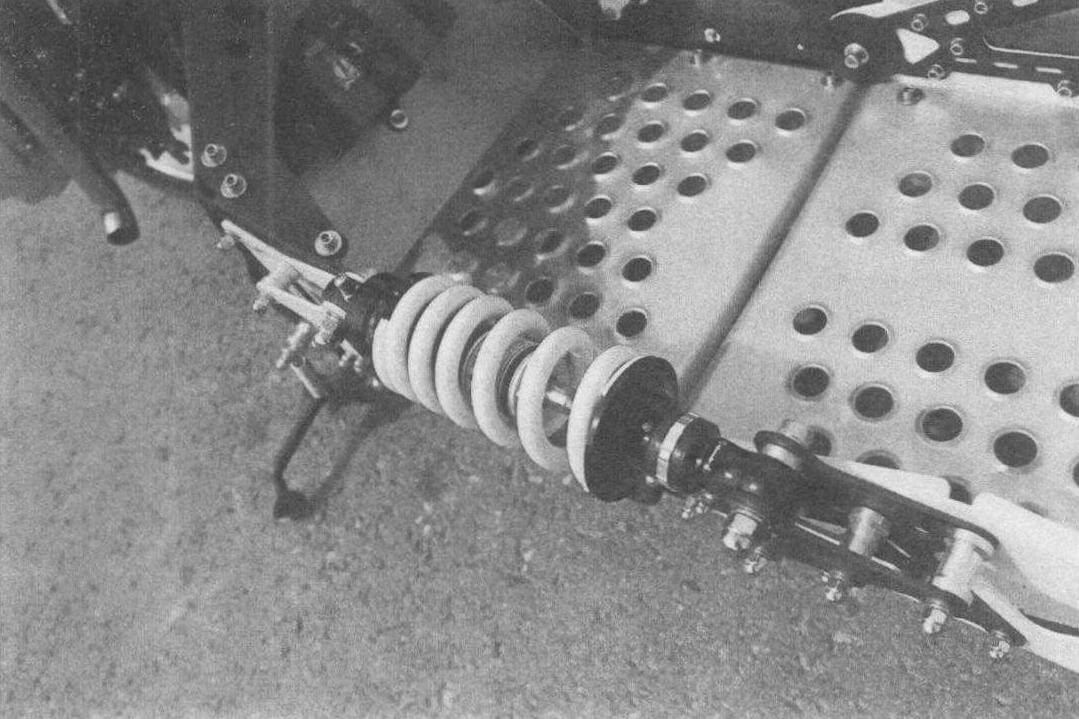
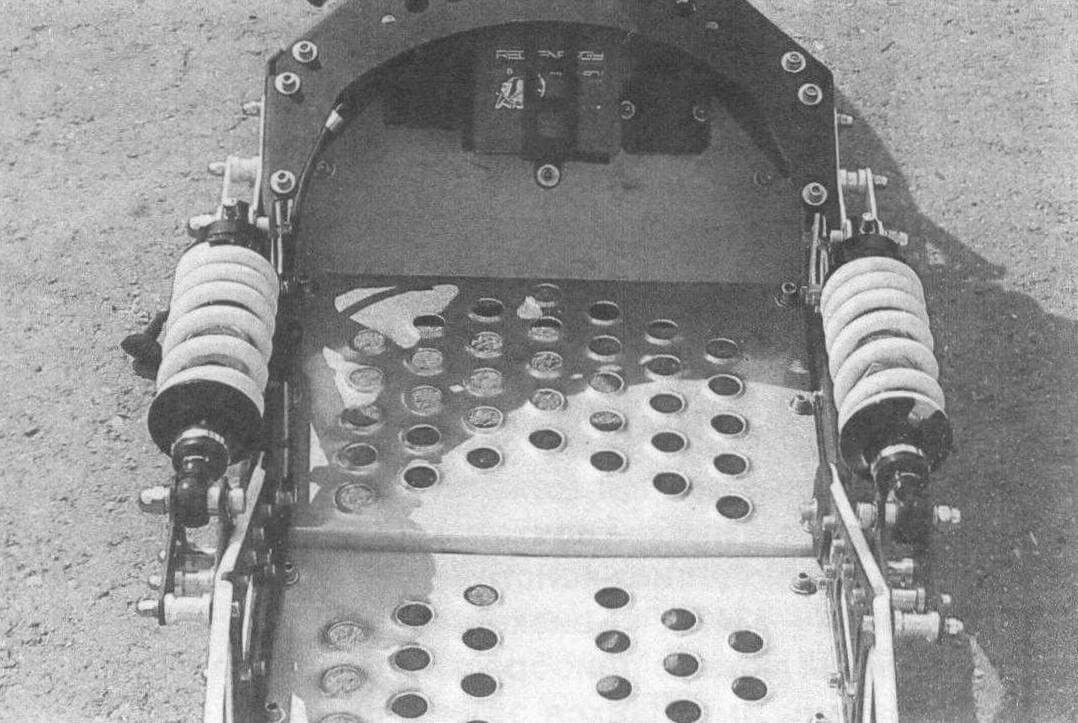
Передняя и задняя половинки рамы качаются относительно друг друга на горизонтально расположенной поперечной оси (в этом узле использованы подшипники 6202RS с обоймами, закрытыми с двух сторон пластиком). От самопроизвольного складывания раму удерживает пара гидравлических амортизаторов с витыми пружинами вокруг корпуса. Они установлены с двух сторон самоката выше оси излома частей рамы. Амортизаторы выбраны достаточно качественные, с полным набором регулировок по гидравлике на демпфирование сжатия и отбоя, плюс можно задать преднатяг пружин. Все это позволяет отрегулировать и настроить работу подвески индивидуально, в зависимости от веса райдера, скорости передвижения и типа дорожного покрытия.
Мысли объединить воедино обе подвески — и переднюю, и заднюю — пришли ко мне еще во времена, когда я работал в Отделе главного конструктора компании «Ижевские мотоциклы». Было это в начале 2000-х годов, и воплотить тогда задумку в металле по понятным причинам не получилось. Но спустя почти два десятка лет нам с Олегом — человеком, полностью разделяющим мое видение двухколесной машины и без которого, скорее всего, эти идеи так и остались бы на бумаге, удалось создать вполне работоспособную конструкцию. И сегодня с уверенностью можно сказать, что данная концепция себя полностью оправдала. Это отнюдь не красиво выглядящая, но при этом лишенная всякого смысла бугафория, какую мы можем сколь угодно много наблюдать на массе китайских поделок (да и отечественных, кстати, тоже). Наша подвеска реально работает!
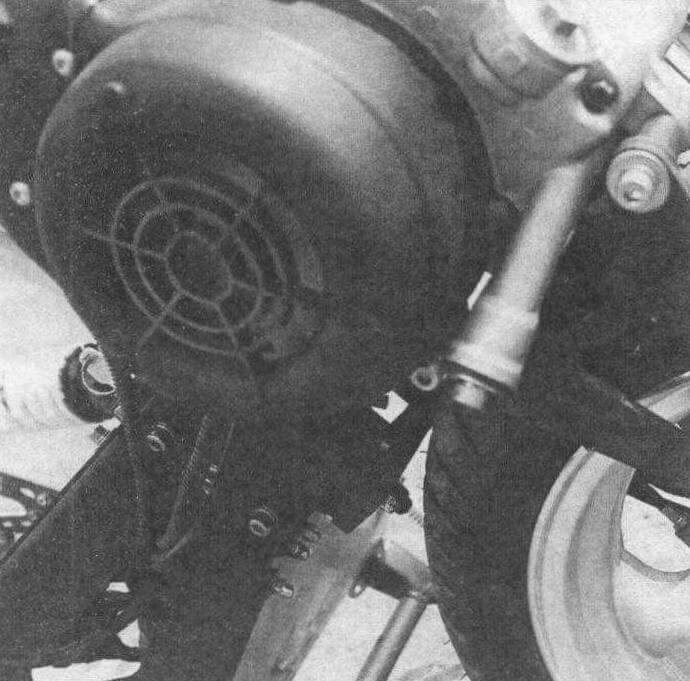
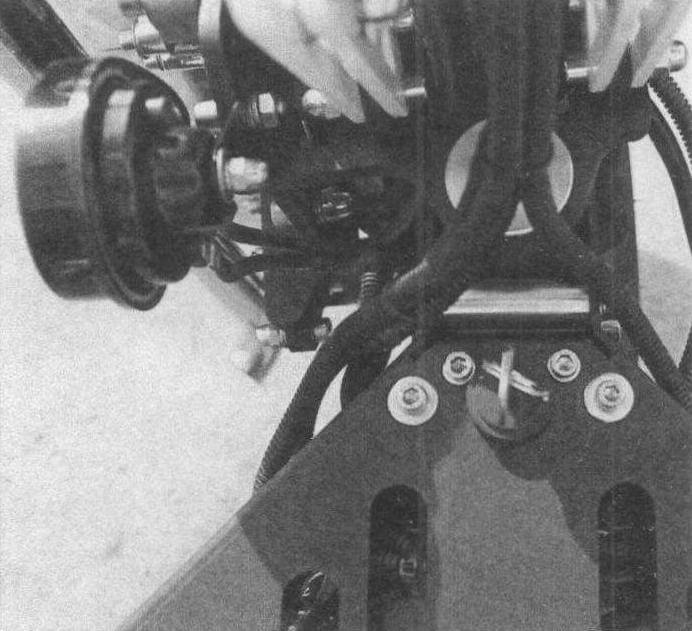
Второе принципиальное решение не столь инновационно. Оно заключается в том, что ведущим служит переднее колесо, и двигатель, приводящий его во вращение, расположен тут же — непосредственно на передней вилке. Такую компоновку можно встретить на мототехнике начала прошлого века. Например, на немецком «Феномобиле», фото которого было опубликовано в апрельском номере «М-К». Применялась она и позже, но особого распространения не получила. В данном случае, как нам кажется, подобная схема в дополнение к объединенной подвеске придает нашему «Мегакату» конструктивную оригинальность и нетривиальный дизайн. К тому же, давно известно, что «тянуть проще, чем толкать».
Двигатель взят от китайского скутера: рабочий объем 180 см3, воздушное принудительное охлаждение, в исполнении с единым блоком вариатора и, естественно, с электрозапуском. Он установлен почти вертикально, поэтому пришлось серьезно доработать его систему смазки. Масляный насос у него погружного типа, он не имеет маслозаборника и находится в картере в самой масляной ванне, откуда и подает масло по каналам к деталям ЦПГ. При штатном горизонтальном расположении мотора все работает нормально, нам же пришлось заглушать ненужные при вертикальной установке масляные каналы, высверливать новые, наваривать аргоном алюминиевые трубки, через которые и происходит теперь забор масла для подачи его наверх.
Изначально определив основной замысел конструкции мотосамоката, мы внимательно подошли к вопросам выбора геометрии наклона рулевой колонки и вылета колеса, определению базы, размера колес, типа шин и т.д. При этом постоянно учитывалось взаимное влияние всех элементов как с технической, так и с эстетической стороны.
Угол наклона рулевой колонки равен 26 градусам — это наиболее оптимальное значение с точки зрения управляемости на классическом мотоцикле. Вылет колеса при этом составил 88 мм. Базу же в угоду устойчивости самоката на высоких скоростях (мотор весьма проворен, и машина с ним легко набирает 80 км/ч) сделали весьма внушительную — 1495 мм. Похожее значение можно встретить у среднекубатурной дорожной мототехники. В рулевой колонке — точке максимальной концентрации напряжений всей конструкции — использованы два мощных конических подшипника с наружным диаметром обоймы 52 мм.
Довольно сложно было реализовать консоль руля, чтобы обеспечить этому узлу необходимую жесткость. Перебрав возможные варианты, остановились на комбинированной конструкции, которая предусматривает возможность трансформации руля как по высоте, так и по вылету, с учетом антропометрии водителя.
Спереди на «Мегакате» установлено 13-дюймовое заднее колесо с литым диском от скутера. Сзади — наоборот: переднее 10-дюймовое колесо от другого скутера. На них смонтирован комплект качественной резины немецкой фирмы METZELER. Передняя шина шириной 140 мм — это максимальный размер, который подходит. Задняя шина имеет ширину 110 мм. В принципе возможна установка резины такого же типоразмера любого более бюджетного производителя, но, как я уже отмечал, скоростной потенциал нашего транспортного средства с данным двигателем достаточно высок, поэтому на покрышках экономить не хотелось — безопасность важнее!
Передние тормоза механические, барабанного типа — они штатно применялись в использованном скутерном тандеме «двигатель-вариатор». А на заднее колесо установили дисковый велосипедный тормоз с диаметром диска 160 мм, он также с механическим приводом.


Основные технические данные «Мегаката»
МОТОР: бензиновый, 1-цилиндровый, 4-тактный, 180 см3, 11 л.с., с воздушным принудительным охлаждением, выполненный в едином блоке с клиноременным вариатором
ТОРМОЗА: передний — барабанный с механическим приводом, задний — дисковый велосипедный с механическим приводом
БЕНЗОБАК: 2 л
СУХАЯ МАССА: 85 кг
МАКСИМАЛЬНАЯ СКОРОСТЬ: 80 км/ч
Пока наш «Мегакат» существует в единственном экземпляре. Однако в отличие от любого кастомного образца, который обычно строится под конкретнота заказчика, в данном проекте сразу продумывалась достаточно простая технология изготовления, при которой можно было бы сравнительно легко повторить такую машину или даже поставить ее на поток. По сути, порядка 90% деталей вырезаны лазером из листовой стали толщиной от 2 до 10 мм, согнуты на листогибочном прессе или выточены на обычном токарном станке. Сварки минимум — почти весь самокат собран на болтовых соединениях. Это, кстати, позитивно работает на его запоминающийся дизайн. А яркая раскраска порошковой эмалью усиливает образ. Но не забыли при этом и о практичности: некоторые элементы, в частности — площадки для ног и рулевая ферма перед покраской подвергнуты горячему цинкованию во избежание проявления коррозии при эксплуатации.
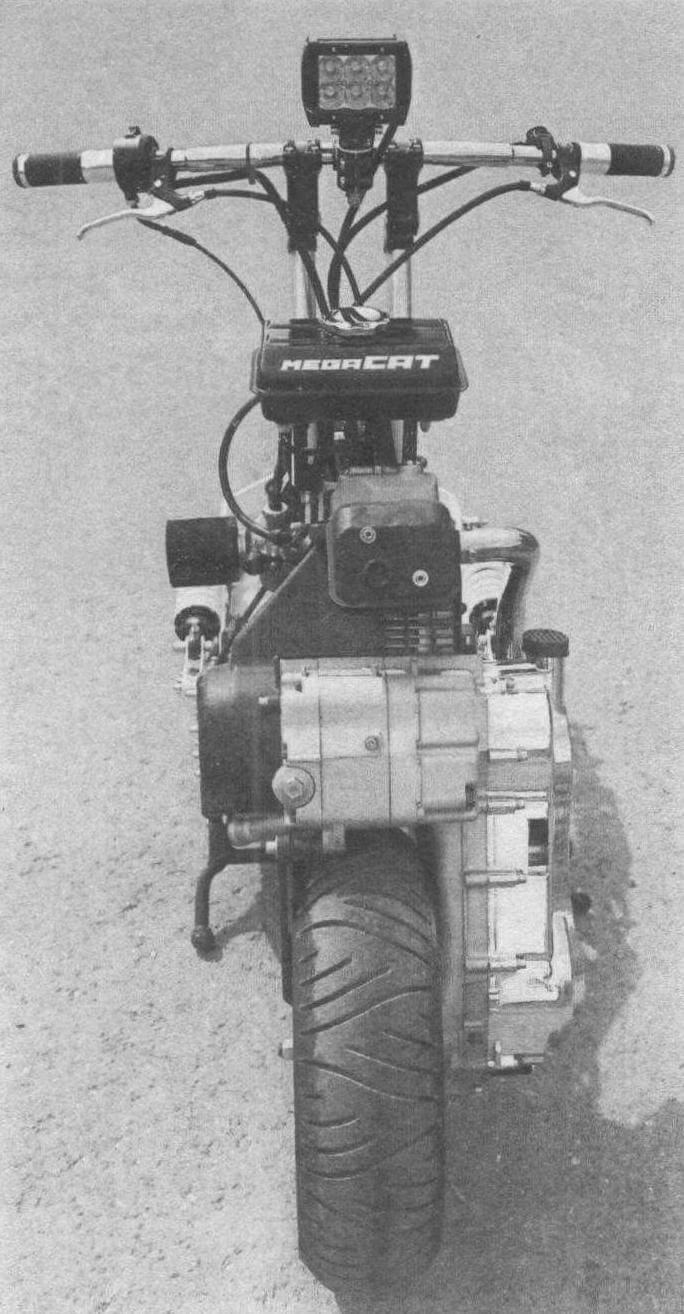
Головное освещение обеспечивает LED-фара с шестью сверхъяркими диодами белого цвета. Подобные фонари устанавливают любители внедорожных «покатушек», квадроцикписты и снегоходчики, так как свет они дают мощный и яркий. Правда, такие источники не сертифицированы для использования на дорогах общего пользования. Впрочем… как и сам наш «Мегакат», которому по букве закона запрещено выезжать на городские дороги. Поэтому мы ни в коем случае не претендуем на его ультраутилитарность и прочие достоинства сугубо «рабочих лошадок», курсирующих по пробкам между домом и офисом. Даже напротив, — позиционируем его как фановую игрушку. А в качестве целевой аудитории видим молодых активных людей — жителей мегаполисов, где имеется много площадок с хорошим покрытием, на которых можно весело провести выходной день или часы отдыха в компании друзей. А заодно и покататься на двухколесных «болидах», способных подарить массу незабываемых впечатлений и положительных эмоций. Ведь для чего мы покупаем или делаем подобную технику? Абсолютно верно — для удовольствия!
Михаил БЕЛОРУСОВ,
г. Ижевск
Рекомендуем почитать
 ИСТОЧНИК ПИТАНИЯ — РАДИОВОЛНЫ
ИСТОЧНИК ПИТАНИЯ — РАДИОВОЛНЫ
Один мой хороший знакомый стал владельцем шести соток неподалеку от Красноярска. В связи с тем, что электричество туда обещают подвести лишь к началу какого-то тысячелетия, а батареек к... ТАКОЙ ЧЕТЫРЕХКОЛЕСНЫЙ МОТОРОЛЛЕР
ТАКОЙ ЧЕТЫРЕХКОЛЕСНЫЙ МОТОРОЛЛЕР
Этот четырехколесный мотороллер (сочлененной схемы) очень удобен для сельской местности. Его двигатель — Т200. Передний мост ведущий. Поворотное устройство гидравлическое, как на тракторе,...