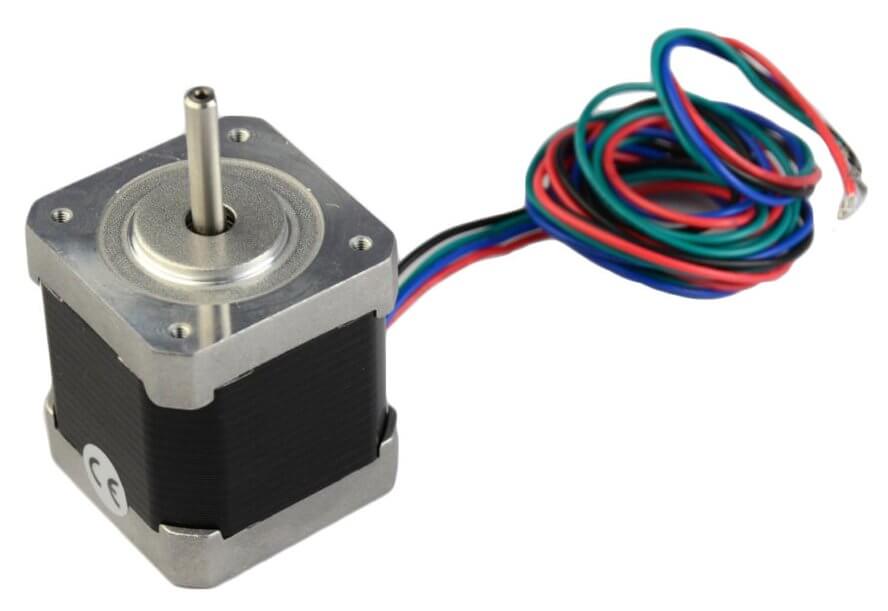
Шаговый двигатель (ШД) — это электрическое устройство с несколькими обмотками, используемое для дискретного смещения магнитного ротора. Шаговые двигатели генерируют высокий крутящий момент при небольших скоростях обращения. При обесточивании обмоток расположение роторного механизма фиксируется.
ШД отличаются большой точностью и имеют длительный срок эксплуатации. Шаговые двигатели применяются в станках с программным управлением, приводах различных механизмов и электронных носителях, предназначенных для хранения компьютерной информации.
Помимо очевидных преимуществ у шаговых устройств есть и определённые недостатки. Самой известной проблемой является проскальзывание ротора, возникающее при неправильной настройке управляющего программного обеспечения, резком увеличении скорости вращения и превышении нагрузки на валу.
Устройства с постоянными магнитами
Конструкция ШД предполагает наличие статора и ротора. Второй элемент представляет собой магнит с несколькими полюсами. Внутри статора расположены полюсные наконечники, имеющие форму пластин. Обмотки находятся на отдельных проводах, которые устанавливаются в непосредственной близости друг от друга. В статоре располагается две фазы.
Полюса ротора располагаются параллельно оси двигателя и имеют прямолинейную ориентацию. При подаче электричества на одну из катушек, магнит занимает положение, при котором полюса ротора и статора устанавливаются напротив друг друга. Двигатели с перманентным магнитным элементом делают 24-48 шагов за один полный оборот. Угол шага составляет 7-15 градусов. Ротор ШД создаёт обратную электродвижущую силу, ограничивающую скорость перемещения вала.
Униполярные и и двуполярные ШД
Двигатели с перманентными магнитами бывают однополярными и двуполярными. Биполярный ШД имеет две катушки и четыре вывода. Смена направления движения магнитного поля в двуполярном устройстве производится путём смены полюсов обмоток.
Эта операция производится при помощи мостового или полумостового управляющего устройства, имеющего двуполярное питание. Катушки однополярного двигателя снабжены особыми отводами. Вектор магнитного поля изменяется после переключения половины обмотки. Для этой операции применяют четырёхключевые драйверы. Монополярный аппарат снабжён 5-6 выводами.
Униполярный механизм с двумя обмотками можно эксплуатировать в двухполярном режиме (отводы необходимо отключить от сети). Расчёт мощности тока, проходящего через обмотки, следует проводить с учётом значения предельной рассеиваемой энергии. Биполярные механизмы генерируют значительную мощность и больший момент. ШД с постоянным магнитом обеспечивают фиксацию ротора после отключения устройства.
Моторы с меняющимся магнитным сопротивлением
В механизмах данного типа отсутствует магнит, поэтому ротор раскручивается свободно, без остаточного крутящего момента. ШД имеет зубчатую форму и состоит из магнитного материала. На статоре располагается 6 магнитных полюсов и три фазы. Отключенный ШД не генерирует тормозящий момент при раскручивании вала. Для передачи магнитной энергии, вращающей ротор, производится последовательное подключение фаз статора.
Двигатели с меняющимся магнитным сопротивлением используются в небольших электронных устройствах (например, в компьютерных жёстких дисках). Для реактивных ШД характерен значительный угол шага (около тридцати градусов).
Гибридные аппараты
В подобных устройствах используются элементы конструкции двигателей как с меняющимся, так и с перманентным магнитным сопротивлением. В статоре ШД используется 4-8 базовых полюсов. Катушки статора, выполненные с помощью двойной намотки, могут иметь ответвление, используемое для монополярного управления. Ротор гибридного аппарата представляет собой магнитный цилиндр с радиальными зубцами, сделанными из намагниченного материала.
Статор имеет зубцы, уменьшающие магнитное сопротивление в определённых положениях ротора. Зубья полюсов статора перемещены на 1/4 деления. Эта конструктивная особенность позволяет уменьшить шаг и повысить точность работы. Типичное число шагов за 1 поворот ШД составляет 150-400 (угол шага составляет 1-3,7 градуса).
Взаимосвязь момента и скорости вращения
Указанная зависимость является базовой характеристикой шаговых устройств. Момент, генерируемый ШД, во многом обусловлен действием следующих факторов: скорость вращения роторного механизма, мощность электричества в обмотках, конструкция драйвера. Также необходимо учитывать силы трения, которые приходится преодолевать работающему устройству.
Динамическое и перманентное трение уменьшает момент, возникающий на валу ротора. Также сила трения становится причиной появления так называемых «мёртвых зон», ограничивающих точность работы. Момент можно изменить путём использования особых схем питания, которые обеспечивают большую скорость увеличения тока в катушках.
Режимы работы ШД
Все виды шаговых механизмов функционируют в одном из трёх режимов:
- Полношаговый. Перемещение роторной установки на 1 шаг осуществляется за один такт;
- Полушаговый. Ротор разворачивается на 0,5 шага за один такт;
- Микрошаговый. Вращение ротора на 0,25 и 0,125 шага осуществляется за один такт.
Восьмивыводные ШД могут функционировать в режиме сниженного потребления электроэнергии, при котором эксплуатируется только часть электромагнитов. Указанный режим существенно снижает крутящий момент роторного механизма.
Как подобрать шаговый механизм?
Правильно выбранный станет хорошей альтернативой сервоприводу. Устройство можно применять для автоматизации машин и механизмов, которые включаются по системе «старт-стоп». Подбор конкретной модели двигателя осуществляется с учётом следующих параметров: габариты, вес, индуктивность, момент энерции ротора, электрическое сопротивление фаз, значение номинального тока в фазе, предельный синхронизирующий момент.
При монтаже устройства нужно учитывать вибрационные воздействия, возникающие из-за дискретного перемещения ротора. Вибрация приводит к снижению значения крутящего момента и возникновению резонансных явлений. Уменьшение силы вибрационных воздействий происходит при использовании большего количества фаз или дробления шага двигателя.
Рекомендуем почитать
 СЕМЕЙНЫЕ ЦЕННОСТИ
СЕМЕЙНЫЕ ЦЕННОСТИ
Недавно исполнилось 60 лет британскому автомобилю Ford Cortina. Он дебютировал в 1962 году и выпускался до 1982 года, уступив место на конвейере модели Ford Sierra. Всего за 20 лет было... ТЕЛЕФОННЫЙ ТРОЙНИК
ТЕЛЕФОННЫЙ ТРОЙНИК
При модернизации телефонного аппарата, подсоединении к нему различных приставок недопустимо любое нарушение нормальной работы линии. Чтобы не прибегать к порочной практике проб и ошибок,...