При постройке радиоуправляемых моделей, в которых используются электродвигатели, предусматривают специальные приборы управления скоростью и направлением вращения ротора. Обычно применяют контактные устройства, устанавливаемые на рулевые машинки, или электронные регуляторы оборотов («спид-контроллеры»). Регуляторы промышленного производства весьма дороги и часто не являются оптимальными. Предлагаю несколько простых схем, совместимых со стандартной аппаратурой радиоуправления, предназначенных для использования на судомоделях классов F2, FSR-ECO и радиоуправляемых игрушках.
Типовая блок-схема реверсивного регулятора оборотов малой мощности приведена на рис. 1. Она работает следующим образом. Импульс с приемного устройства поступает на вход опорного ждущего мультивибратора и передним фронтом запускает его. Входной и выходной импульсы ждущего мультивибратора следуют на схему сравнения, имеющую два выхода, и в случае несовпадения длительностей на том или другом выходе (в зависимости от того, какой импульс больше) формируется разностный импульс.
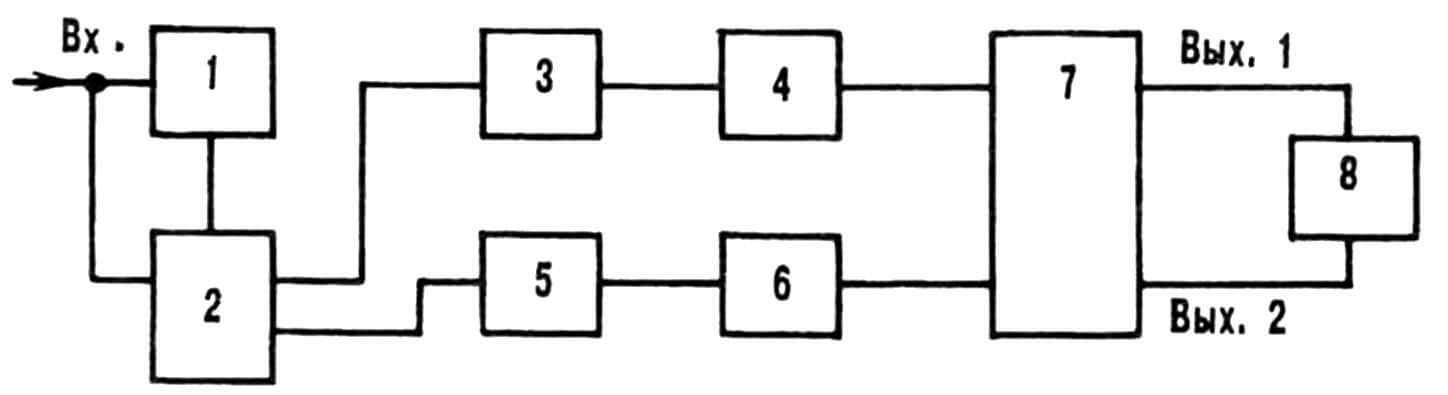
Далее он «растягивается» по времени на интеграторах, формируется в виде широтно-импульсного сигнала на пороговых устройствах и усиливается на мостовом выходном каскаде.
Регуляторы, имеющие описанную блок-схему, просты, не требуют сложной регулировки, но имеют небольшую выходную мощность. Их рабочее напряжение, как правило, не превышает 12 В, рабочий ток — нескольких ампер.
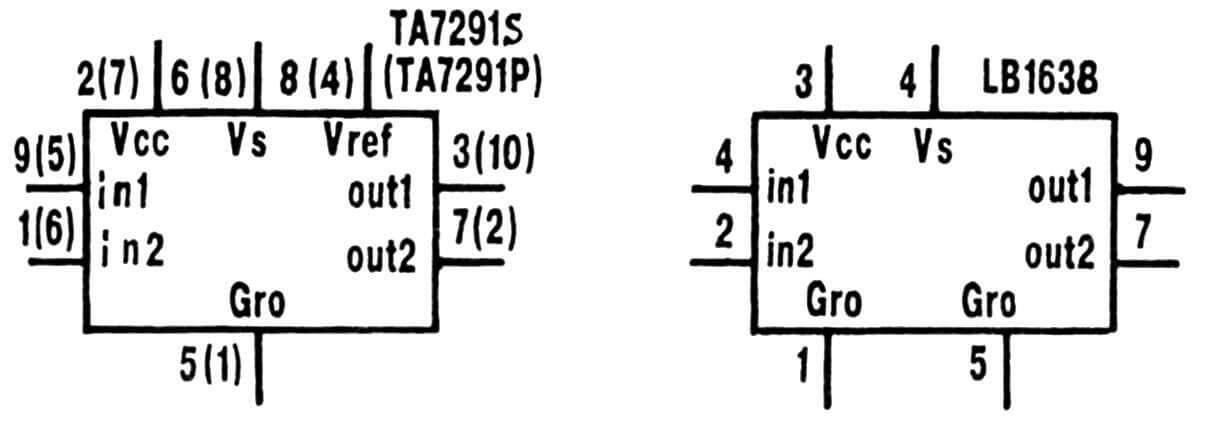
Ждущий мультивибратор и схема сравнения собраны на микросхеме К561ЛЕ5, содержащей четыре логических элемента типа 2ИЛИ-НЕ (рис. 2). Разностные импульсы через диоды и ограничительные резисторы подаются на RC-цепочки, использующиеся в качестве интеграторов. Пороговые устройства и мостовой усилитель мощности выполнены на микросхеме ТА7291. Она разработана фирмой TOSHIBA для управления электродвигателями загрузки кассет в видеомагнитофонах и вполне подходит для небольших моделей класса F2A. Эта микросхема имеет большое входное сопротивление (150 кОм), схему защиты от одновременного срабатывания и защиту от перегрузки. Максимальный рабочий ток ее — 2 А (при токе нагрузки 1 А), падение напряжения — 1,2 В. Допускается параллельное включение до четырех таких микросхем, что позволяет увеличить выходной ток регулятора. ТА7291 выпускается в двух вариантах корпуса — Р и S. Отличие заключается в размерах и рассеиваемой мощности, которая у Р в четыре раза больше, чем у S. Микросхему в корпусе варианта Р можно устанавливать на радиатор теплоотвода.
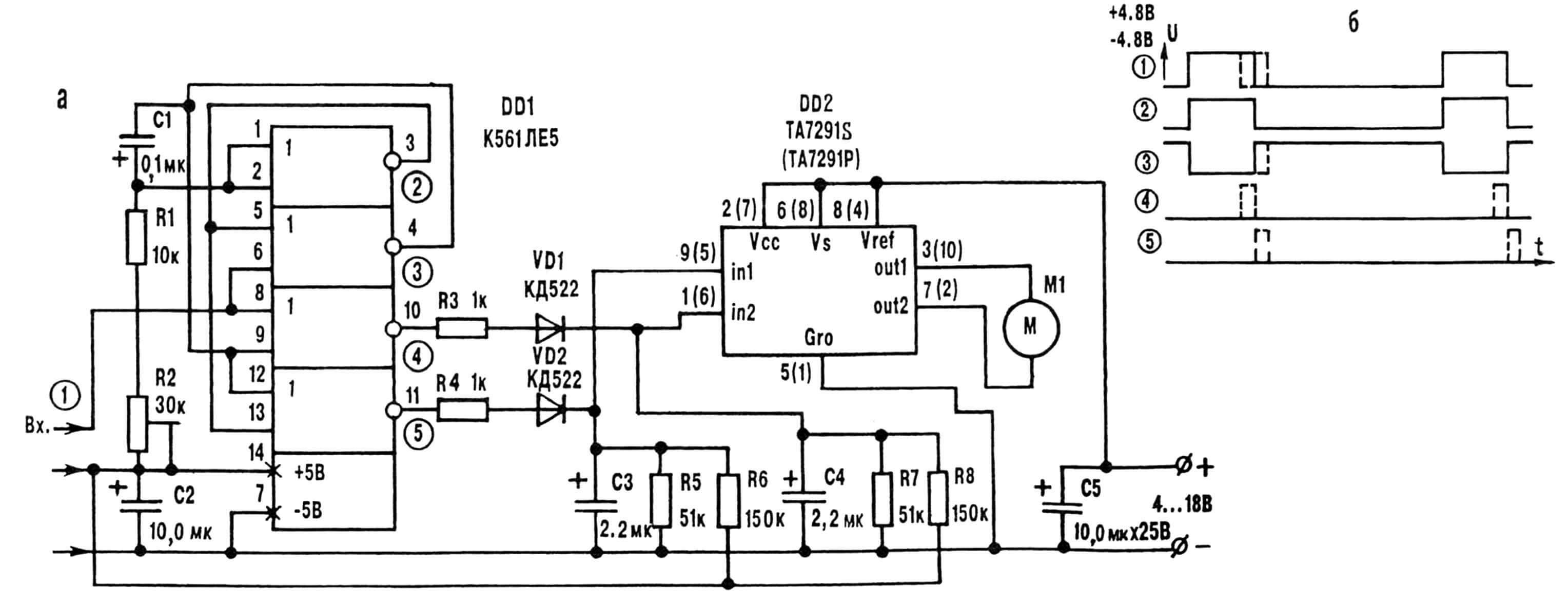
Для небольших моделей и игрушек в качестве порогового устройства и усилителя мощности можно использовать микросхему LB1638. Она отличается миниатюрными габаритами и малым падением напряжения; максимальный рабочий ток ее — 1 А, напряжение — 12 В.
Для моделей с более мощными двигателями подойдет регулятор оборотов, блок-схема которого показана на рис. 4. В этом регуляторе, в отличие от предыдущего, имеются две схемы сравнения: детектор длительности, который задает направление вращения, и схема выделения разностного импульса, которая «растягивает», ограничивает и подает импульс на усилитель мощности. Выходная мощность регулируется транзистором, а направление вращения — реле, управляемым детектором длительности.
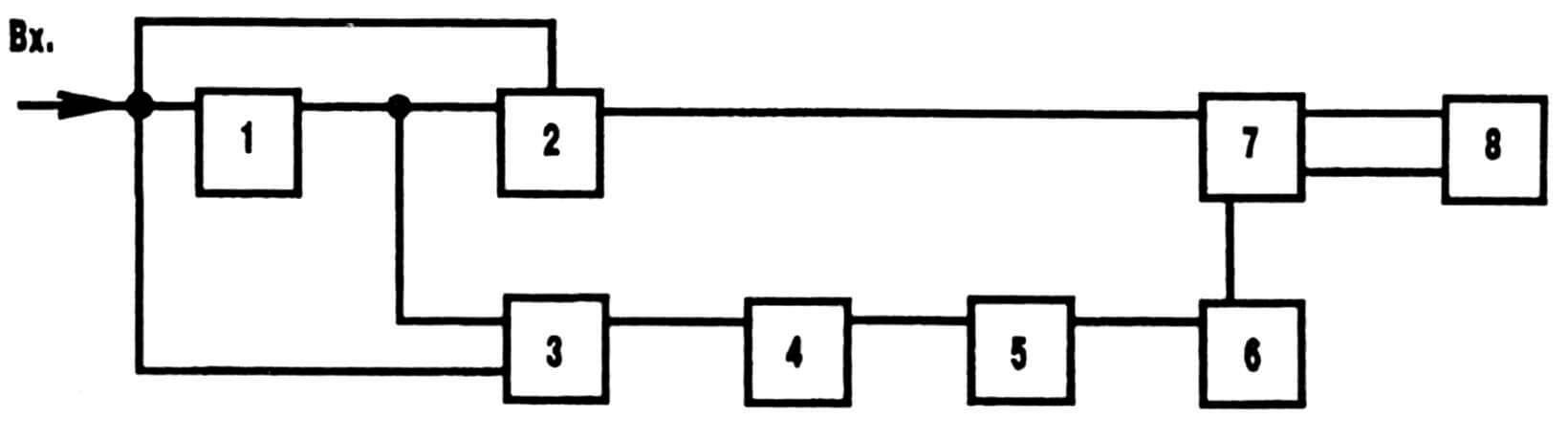
Регулятор, выполненный по такой блок-схеме, не имеет теоретического ограничения выходной мощности. На практике выходной ток ограничивается характеристиками транзистора (современные полевые транзисторы допускают более 100 А) и контактов реле (автомобильные работают и при токах более 30 А). Рабочее напряжение ограничивается только характеристиками реле.
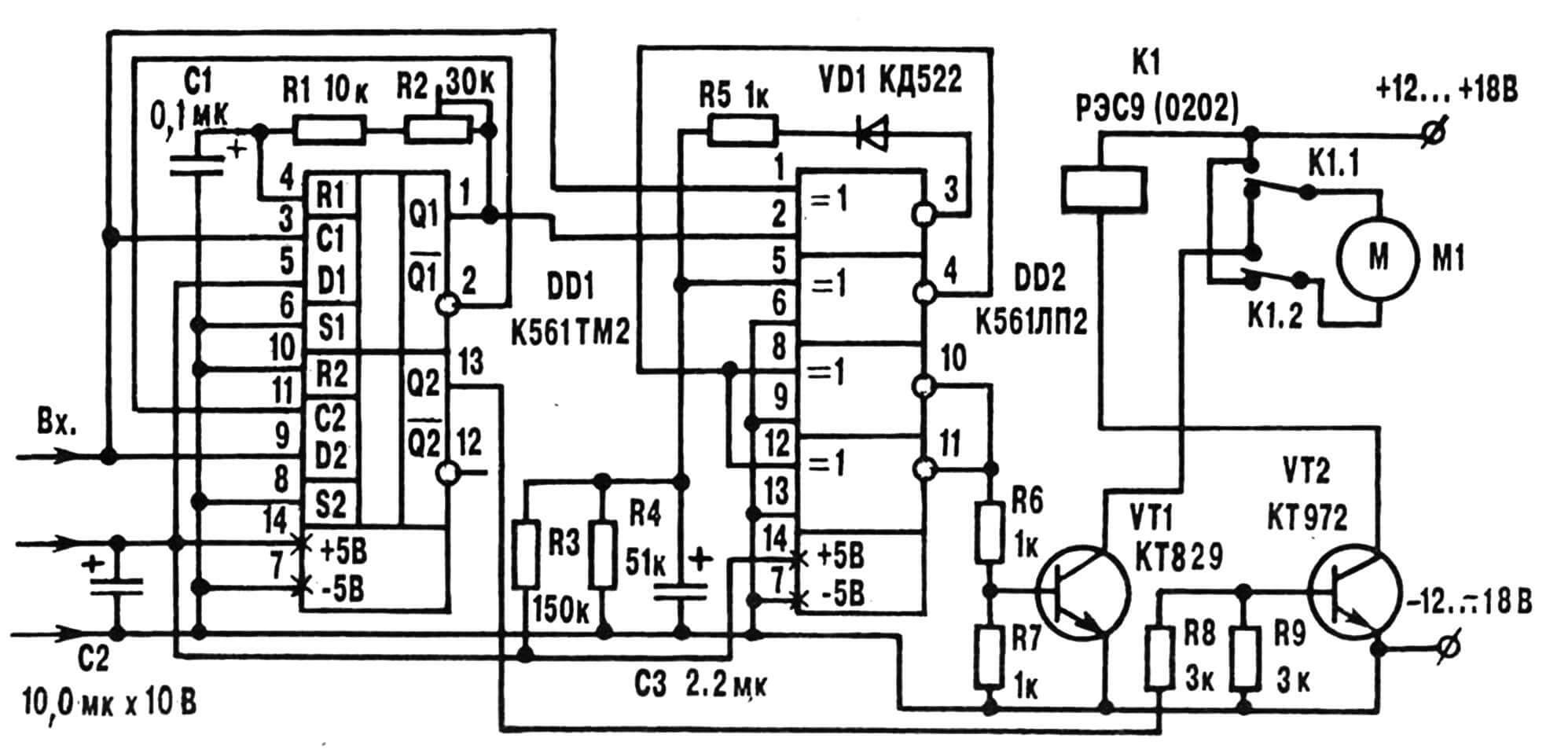
Ждущий мультивибратор и детектор длительности мощного регулятора (рис. 5) построены на микросхеме К561ТМ2, представляющей собой два независимых D-триггера с динамической записью. Схема сравнения и пороговое устройство собраны на микросхеме К561ЛП2, в ее состав входят четыре элемента типа «Исключающее ИЛИ». Выходной транзистор КТ829 (КТ827) должен иметь коэффициент усиления не менее 1000 и устанавливаться на радиаторе теплоотвода. Максимальный выходной ток регулятора 4 А (КТ829) или 8 А (КТ827). Такие токи способно надежно выдерживать реле типа РЭС9. Принципиальная электрическая схема простейшего регулятора оборотов для моделей класса FSR-ECO представлена на рис.6. Она работает так же, как и схема, приведенная на рис. 2, но без реверса. Напряжение питания подается на приемник через регулятор. В качестве оконечного каскада усилителя мощности используются полевые транзисторы BUZ100, выпускаемые фирмой PHILIPS для применения в мощных ключевых устройствах. Максимальный импульсный ток регулятора — 100 А, максимальный в течение 5 с — 50 А, максимальный ток длительного включения — 20 А. Максимальное напряжение питания — 18 В. Падение напряжения на регуляторе не более 0,3 В при токе 20 А. Выходные транзисторы должны устанавливаться на радиаторах теплоотвода.

При снижении напряжения питания до уровня менее 7,2 В максимальный выходной ток уменьшается. Для его увеличения допускается параллельное подключение дополнительных транзисторов. Транзисторы BUZ100 можно заменить на аналогичные производства других фирм или на менее мощные, но с параллельным подключением.
Во всех описанных регуляторах допускается применение любых типов резисторов и конденсаторов, рабочее напряжение последних должно быть не менее 20 В. Электродвигатели необходимо оборудовать системой гашения помех.
В. ЖОРНИК,
мастер спорта, инженер,
г. Королев, Московской обл.
Рекомендуем почитать
 ЗОЛОТНИКОВЫЙ ДВИГАТЕЛЬ ДЛЯ КАРТА
ЗОЛОТНИКОВЫЙ ДВИГАТЕЛЬ ДЛЯ КАРТА
(Окончание. Начало в № 12, 1974 г.) В предыдущем номере мастер автомобильного спорта СССР М. Тодоров рассказал о том, с чего нужно начинать работы по форсировке двигателя,... НАДЕЖНО И БЕЗ СТРУБЦИНЫ
НАДЕЖНО И БЕЗ СТРУБЦИНЫ
При выпиливании лобзиком опорная площадка для дощечки обычно крепится к столу струбциной, что не очень удобно, если работать приходится часто. Лучше несколько модернизировать способ...