Второй фактор динамической устойчивости — продольная составляющая. Насколько она важна, становится ясно хотя бы из того, что большая часть ведущих спортсменов мира использует на глиссерах гибкие валы для приведения оси винта к горизонтальному положению. А ведь такая система способна «съесть» до 30% мощности мотоустановки! Но моделисты шли на это, зная, что пока не разработано угловых шарниров, удовлетворяющих условиям монтажа узла в потоке перед винтом, и не зная других схем.
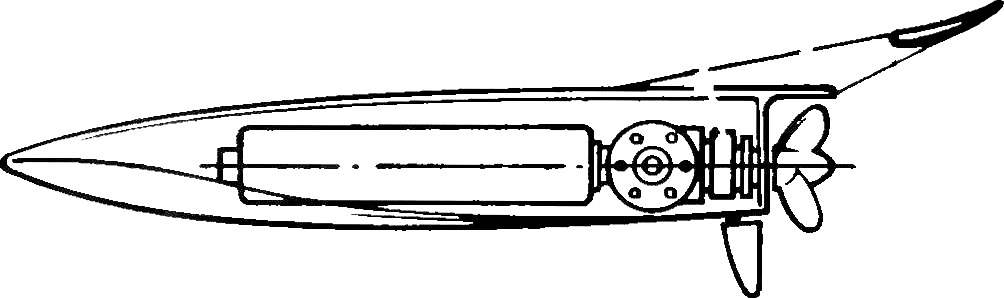
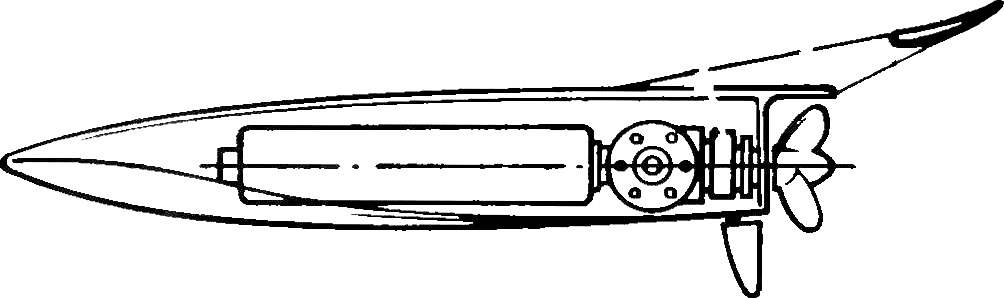
Как сразу «убить двух зайцев», станет ясно при рассмотрении схемы новой модели. Ее достоинства не только в резком снижении размерений и, следовательно, массы. Одновременно удалось облегчить мотоустановку в целом, резко повысить КПД механической передачи, упростить все узлы привода и при этом добиться горизонтального положения оси винта. Кроме того, теперь (и только теперь!) можно говорить о четкой фиксации режима работы гребного винта, ставшего «четвертьпогружным». Раньше малейшее волнение на акватории приводило к работе движителя в столь неопределенных, мгновенно меняющихся условиях, что его оптимизация становилась попросту бессмысленной; методом подбора удавалось найти лишь варианты, более или менее удовлетворяющие вынужденно заниженным требованиям.
Итак — новая предлагаемая вниманию судомоделистов схема скоростной модели выигрышнее по сравнению с любыми известными вариантами. Остается испробовать ее в деле. Конечно, придется посвятить отработке ее обводов определенное время. Но, как говорится, игра стоит свеч. Резкий прирост быстроходности и динамических свойств — это еще не все плюсы новой схемы. Значительное снижение трудоемкости как мотоустановки, так и самого микрокорпуса, позволяет вести широкий поиск в области гидродинамики глиссера.
А каковы перспективы развития предложенной схемы? Оказывается, и с этой точки зрения она выигрышнее известных. Взгляните на чертежи. И попробуйте врисовать в данную модель двухмоторную установку с противоположно вращающимися гребными винтами. Два двигателя располагаются головками от оси корпуса, синхронизация гребных валов может осуществляться либо простой легкой шестеренчатой связью (которая рассчитывается лишь на усилия синхронизации, значительно меньшие, чем усилия непосредственной передачи мощности одного двигателя!), либо легким фрикционом. Кроме достижения идеала по боковой устойчивости глиссера, подобное решение интересно и с точки зрения снятия максимальной мощности — при меньшей кубатуре глубина форсировки может быть увеличена. Да и проблема шумоглушения при делении допустимого рабочего объема решается значительно проще.
Еще один занятный фактор, с которым можно встретиться при создании сверхмалой легкой модели, — необходимость обеспечения нужной аэродинамики. В частности, это касается обводов корпуса, так как на глиссере нового типа нагрузка на единицу площади проекции корпуса «в плане» намного меньше, а потенциальные возможности по быстроходности больше. Не исключено, что в судомоделизме вопросы аэродинамики смогут выйти на первое место и стать перед задачами гидродинамики. И тогда вам помогут графики, показывающие, какими критериями пользоваться при подборе стабилизаторов и антикрыльев. Как кажется, подобные устройства, непривычные сегодня, станут необходимыми на моделях завтрашнего дня.
Наконец, хотелось бы предложить еще одно перспективное решение; его можно использовать даже на обычных радиоуправляемых сегодняшнего дня. Это — ввести в передачу после маховика двигателя еще и муфту сцепления. Смысл мероприятия станет ясен, если внимательно разобраться с тем, что происходит с двигателем и моделью при вводе и прохождении поворота и почему модели с электродвигателями по крайней мере не уступают глиссерам с моторами внутреннего сгорания.
Перед вводом в поворот мы так или иначе вынуждены сбросить скорость любой модели. На ДВС это осуществляется за счет управления карбюратором. Однако при всей отработанности схемы ей присущ большой недостаток: при снижении оборотов двигатель выходит из резонансного режима, заданного выхлопной трубой, и резко сбрасывает мощность, некоторое время продолжая идти с небольшим замедлением из-за значительной энергии, запасенной в высокооборотном маховике. Немалой энергией обладает и тяжелая модель, что, несмотря на потенциальную возможность двигателя резко снизить мощность, заставляет начинать подготовку к повороту намного раньше. Но вот сам поворот, вот он наконец пройден. А что теперь? Нужно было бы резко прибавить скорость. Но… не выйдет! Двигатель, выведенный из резонансного режима, имеет при любых действиях с карбюратором малую мощность, да еще перед ним, кроме разгона тяжелой модели, ставится задача разогнать заторможенный маховик? Какая уж тут динамика…
И приходится спортсменам скрепя сердце переводить все параметры модели и мотоустановки с максимальных значений на промежуточные, не столь далекие от условий движения на повороте. Пускай не так быстроходна, зато чуть динамичнее. А то ведь не исключен вариант, когда разгон затянется настолько, что, не успев закончиться, должен будет перейти в новое торможение перед очередным поворотом. Еще один компромисс… Еще не надоело искать их?
А выход — в том же облегчении всей модели, увеличении КПД мотоустановки в целом и… в применении муфты сцепления. Лишь она позволит глиссеру с ДВС не только приблизиться по динамике к «электричкам», но, может быть, даже и превзойти их. Смысл введения муфты вот в чем. Перед поворотом муфта, до этих пор зафиксированная, немного отпускается (степень расфиксации легко поддается регулировке либо может быть управляемой). Модель, особенно легкая, быстро затормаживается, так как энергия раскрученного маховика уже не передается на винт в полной мере. Зато сам маховик начинает набирать обороты и энергию, так как мы сняли часть нагрузки с двигателя. Мотор выходит на зарезонансные обороты. Так, после прохождения поворота он уже подготовлен к выдаче максимальной мощности. Нужно лишь… затормозить его включением муфты. Слишком резко это сделать не удастся — в маховике запасена огромная энергия, по окончании поворота непосредственно идущая на разгон модели. А после исчерпания избытков энергии перераскрученного маховика двигатель с высоких оборотов переходит на резонансные. Сразу же!
Зависимость скорости на дистанции для моделей различных типов:
1 — оптимизированная модель со сниженной максимальной скоростью и удовлетворительными характеристиками торможения-разгона, 2 — аналогичная модель, отрегулированная лишь по максимальной скорости и имеющая вследствие этого ухудшенные динамические характеристики, 3 — модель с электродвигателем аналогичных размерений и удельной мощности.
Зависимость скорости на дистанции для моделей с ДВС:
1 — соответствует предыдущему графику, 2 — модель уменьшена и облегчена, двигательная установка оптимизирована для новых условий, 3 — аналогично 2-му, но в схеме использована муфта сцепления.
Возможно, подобная система потребует либо раздельного управления карбюратором и муфтой, либо их совместной работы, при которой тяга карбюратора начинает двигаться после полурасцепления муфты. Здесь эксперимент провести несложно. Важно при выборе конструкции муфты обеспечить возможность ее плавного включения. Один из возможных вариантов приведен на рисунках. Он спроектирован на базе фирменных тормозов для авиамоделей, по их паспортным данным построен и график тормозного момента. На рисунках муфта представлена как отдельный узел, однако есть прямой смысл объединить муфту с маховиком двигателя. В предложенном варианте муфта способна удержать лишь часть вращающего момента, так как для мотора 3,5 см3 момент доходит до 3000—4000 г*см. Требуемое трение достигается установкой нескольких дисков на поводке ведомой части вала и ответных элементов на шипах корпуса муфты. Возможны и другие варианты муфт (центробежные, типа тех, что стоят на радиоуправляемых автомоделях, или классические фрикционные многодисковые) с механическим приводом от обычных рульмашинок с введением в тягу пружинных элементов для управления тормозным моментом. Однако электромуфта гораздо привлекательнее, так как не требует использования рульмашинок, за счет чего достигается и упрощение схемы с соответствующим повышением надежности, и облегчение модели. Конечно же, в отличие от авиационного тормоза муфта должна потреблять энергию лишь при расфиксации.
Тормозная муфта и ее характеристики:
1 — ведущий вал, 2 — токонесущие кольца для питания обмотки электромагнита, 3 — корпус муфты (мягкая сталь, стенка по всей детали не менее 2 мм), 4 — обмотка магнита (провод ПЭЛ-0,3, до заполнения каркаса катушки; сопротивление обмотки около 6,5 Ом; после проверки пропитать эпоксидной смолой), 5 — пружина, 6 — тормозная шайба (мягкая сталь толщиной 2 мм), 7 — ведомый элемент с пальцем-поводком, входящим в окно тормозной шайбы, 8 — шарикоподшипники.
Итак, рассмотрены интересные перспективы развития радиоуправляемых скоростных глиссеров. Может быть, не все конструкторские находки найдут применение на моделях завтрашнего дня. Однако при разработке новых аппаратов, прежде чем отвергнуть предложенные решения, рекомендуем вначале еще раз внимательно прочитать эту статью. И, главное, постараться отвлечься от завораживающего влияния привычной супертехники, использующей крайне дефицитные материалы и технологии, основывающейся на «лобовых» приемах форсирования надежных разработок. А вдруг все гораздо проще!
И последнее, подумайте и взвесьте еще раз — не стоит ли заняться подобными микроглиссерами с упрощенными мотоустановками сегодня, чтобы завтра с «бронекатерами», изготовленными из суперматериалов и снабженными мощнейшими двигателями, не оказаться позади! Может быть, будущее за общедоступными в постройке микроглиссерами!
В. ВИКТОРОВ, инженер-гидродинамик
Рекомендуем почитать ВЕСЬМА КРЕАТИВНЫЙ КОНЕЦ Окончание - начало в № 7/2016. В мае 1943-го наступил окончательный перелом в битве за Атлантику. Дёниц попытался повторить ситуацию, сосредоточив в общей сложности 55 подводных лодок из... РЕЗИНОМОТОРНАЯ БЕЗ ПИЛОНА Основные данные модели:
общая площадь — 18,91 дм2,
площадь крыла — 14,91 дм2,
площадь стабилизатора — 4 дм2,
вес крыла — 45 г,
вес стабилизатора — 9 г,
вес винта — 43...
 Сегодня мы предлагаем вниманию судомоделистов необычный материал. Если большинство публикаций строилось на основе существующих разработок и было посвящено уже реализованным результатам конструкторского поиска, то настоящая статья инженера-гидродинамика В. Викторова, как бы в противовес им, полностью состоит из одних лишь «идей». Но сколько раз история развития моделизма, да и техники вообще, доказывала перспективность и жизнеспособность кажущихся поначалу «бредовыми» разработок! Характерно, что все они на первых порах встречают либо активное сопротивление со стороны даже опытных спортсменов (может быть, надо говорить не «даже», а «особенно»? Ведь богатый опыт — одновременно и богатство, но иногда и «ограничитель» для всего, что не укладывается в рамки накопленного опыта), либо полное пренебрежение.
Сегодня мы предлагаем вниманию судомоделистов необычный материал. Если большинство публикаций строилось на основе существующих разработок и было посвящено уже реализованным результатам конструкторского поиска, то настоящая статья инженера-гидродинамика В. Викторова, как бы в противовес им, полностью состоит из одних лишь «идей». Но сколько раз история развития моделизма, да и техники вообще, доказывала перспективность и жизнеспособность кажущихся поначалу «бредовыми» разработок! Характерно, что все они на первых порах встречают либо активное сопротивление со стороны даже опытных спортсменов (может быть, надо говорить не «даже», а «особенно»? Ведь богатый опыт — одновременно и богатство, но иногда и «ограничитель» для всего, что не укладывается в рамки накопленного опыта), либо полное пренебрежение.