Стоит ли сейчас, когда в обычных и интернет-магазинах можно приобрести разнообразные радиоуправляемые модели и компоненты для них, создавать самодельную аппаратуру? Думаю, стоит, поскольку созданная своими руками аппаратура имеет немало достоинств, таких как ремонтопригодность, возможность модифицировать для решения новых задач, отсутствие необходимости переделывать ее под новые требования, как это происходит при приобретении готовой и постоянно совершенствуемой аппаратуры. Кроме того, у злоумышленников возникнут затруднения по созданию помех, так как аппаратура «радиоэлектронной борьбы» будет эффективна лишь против систем радиоуправления, поступающих в продажу.
Также было бы заманчиво сделать аппаратуру, допускающую без изменений в шифраторе и дешифраторе работать с любым, даже не особо качественным каналом связи: радио, индукционным, инфракрасным, проводным.
Какой же, в общих чертах, быть самодельной аппаратуре? Начнем с того, что все системы радиоуправления можно разделить на три группы: аналоговые с тональным кодированием, простейшие цифровые (обычно числоимпульсные) на цифровых микросхемах общего применения и цифровые на специализированных больших интегральных схемах (БИС).
Начнем со вторых. Эту тему в свое время развивал, в том числе и на страницах «М-К», А.А. Проскурин. Я экспериментировал с некоторыми из них и оказался не вполне доволен устойчивостью их работы. Они требуют четкой передачи логических уровней. Внедрение сложных логических алгоритмов защиты от помех на простых логических микросхемах невозможно, а простые алгоритмы обычно могут только лишь переключить систему на «Стоп» в присутствии помех. Да и реализация простых алгоритмов требует немалого числа корпусов микросхем, так что габаритно-весовые характеристики аппаратуры получаются неудовлетворительными.
В современных специализированных БИС нетрудно реализовать эффективные алгоритмы кодирования-декодирования команд и помехозащиты. Однако в этом случае моделист оказывается полностью зависимым от производителей микросхем. Представьте себе такую вполне возможную ситуацию — через несколько лет вам пришлось ремонтировать аппаратуру или вы захотели построить вторую модель, которая управлялась бы с того же пульта, что и предыдущая. При этом оказывается, что фирма сочла этот стандарт устаревшим, прекратила выпуск аппаратуры и вам надо тратиться на переделку всего на новый стандарт… Не может также моделист и повлиять на какие-либо характеристики аппаратуры: состав команд, напряжение питания и т.д.
Таким образом, приходим к варианту аналоговой системы. Для минимально полноценного управления самыми разными моделями необходимо и достаточно двух-трех пропорциональных каналов. А это тональные аналоговые системы вполне могут обеспечить. В аналоговых системах нет понятия о синхронизации, часто срываемой помехами. Любой обрывок сигнала тональной системы — информативен и будет правильно понят. Их элементная база — отдельные транзисторы или же операционные усилители (ОУ) останутся сами собой и через четверть века, разве что появятся более современные варианты, опять-таки совместимые с прежними. Стало быть, ремонт или строительство новых систем не составят проблемы и многие годы спустя.
Выбрав систему, определимся с ее конструкцией.
ТИП ФИЛЬТРА
Схемы аппаратов с тональным кодированием много раз публиковались, начиная с 1960-х годов и, как правило, использовали LC-контуры с катушками на кольцевых ферритовых сердечниках. Очень трудоемкий, хрупкий и нестабильный элемент. На его настройку влияют температура, старение феррита, подмагничивание проходящим током. Кроме того, такие контуры крайне неудобны в подгонке частоты, и на них затруднительно использовать низкие командные частоты. Тогда как отличные и стабильные характеристики можно получить на активном RC-фильтре даже на одиночном транзисторе типа КТ3102 (успешно применялись в первом варианте системы), не говоря уж об ОУ.
ТИП КЛЮЧЕВОГО ЭЛЕМЕНТА
Применение электромагнитных реле кажется само собой разумеющимся. Достоинств масса: полный разрыв силовой цепи при выключении и отсутствие потерь напряжения при включении, гальваническая развязка контактов от цепей управления, что дает возможности создавать эффективные схемы коммутации нагрузки, в том числе и при полностью отдельных источниках питания для силовой части. Однако и недостатков немало.
Токи срабатывания и отпускания реле заметно отличаются, что, особенно при нечетком сигнале с дешифратора приводит к тому, что при высоком уровне сигнала или напряжения питания возможно «залипание» реле, а при севшем источнике питания — его несрабатывание. Кроме того, большинство реле рассчитано на работу при напряжении 12 В, а то и 27 В, а в системах радиоуправления питание обычно не выше 9 В. Низковольтные реле редки, да и ток их срабатывания составляет около 50 мА, а то и выше, что уже соизмеримо с током нагрузки. Советы ослаблять пружины реле не очень хороши, так как могут привести к их залипанию. Наконец, у реле нет возможности плавно регулировать напряжение, например на ходовых моторах авто- или судомоделей. Вывод — применяем мощные транзисторы.
ПРИНЦИП ДЕЙСТВИЯ
В разных вариантах системы используются типовые модули, что облегчает сборку или переход одного из них на другой. Продолжая традицию давать своим новым разработкам имена героев аниме «АКВ0048», я назвал базовый двухканальный вариант этой системы «Каната». Собственно, временная диаграмма ее работы (рис. 1) и пояснений-то особых не требует.

В каждом из каналов работают два генератора своих тональных частот, попеременно передающихся на модель. Соотношение времени их передачи и определяет положение рулей модели.
Рули, управляемые первым каналом, находятся в нейтральном положении, так как время передачи частот f2 и f3 одинаково. А вот во втором канале рули уже повернуты, так как f4 передается дольше, чем f5. Частоты каждого пропорционального канала переключаются с частотой 100-200 Гц в течение 35 мс, после чего таким же образом передается информация о следующем канале. В отличие от цифровых систем точное соблюдение указанных частот переключения тонов одного канала и самих каналов не имеет особого значения. Какие-либо синхронизации или соблюдение определенного порядка передачи тонов и каналов также не нужны — фильтрам в дешифраторе все равно, в какой момент времени поймать свою тональную частоту. В каждый момент времени передается только одна частота, что исключает возможность появления комбинационных частот. Благодаря этому достигается высокая помехоустойчивость аппаратуры. Если же учесть, что в системе имеется автоматическая регулировка усилителя (АРУ), благодаря которой разные по уровню входные сигналы приводятся к более постоянной амплитуде, то вы можете оценить, насколько эта система нетребовательна к качеству канала связи.
Используемые частоты. Базовый двухканальный вариант использует частоты № 2 — 5.
| № частоты | Частота, кГц | Назначение |
| 1 | 1 | Дополнит. дискретная команда |
| 2 | 1,6 | Пропорциональный канал А |
| 3 | 2,9 | |
| 4 | 3,6 | Пропорциональный канал В |
| 5 | 4,3 | |
| 6 | 5,2 | Пропорциональный канал С |
| 7 | 6,3 |
Обычно описание подобных систем принято начинать с передающей части. Но мы отступим от этого правила, ведь по рисунку 1 и таблице уже и так понятно, с чем придется иметь дело приемной части.
Питается бортовая аппаратура от двуполярного источника напряжением 3,5…4,5 В в каждом плече. Таким образом, для каждого плеча можно применить литий-ионный или литий-полимерный аккумуляторы. Также допускается питание от двух блоков из трех никель-металлогидридных аккумуляторов и даже обычных гальванических элементов.
МОДУЛЬ ДР4 (ДЕШИФРАТОР РЕГУЛИРУЕМЫЙ ЧЕТЫРЕХКАНАЛЬНЫЙ)
Входной сигнал поступает на предварительный усилитель на VT1, а с его выхода на фильтры и одновременно на выпрямитель на VD1, VD2. Если выходное напряжение усилителя оказывается слишком большим, то, будучи выпрямленным и сглаженным, оно поступает в отрицательной полярности на затвор VT2 системы АРУ, закрывая его и увеличивая сопротивление в цепи эмиттера VT1. Это очень эффективный способ регулировки усиления. Он обеспечивает приемлемый уровень сигнала на входах фильтров при входном уровне примерно от 20 мВ до нескольких вольт.
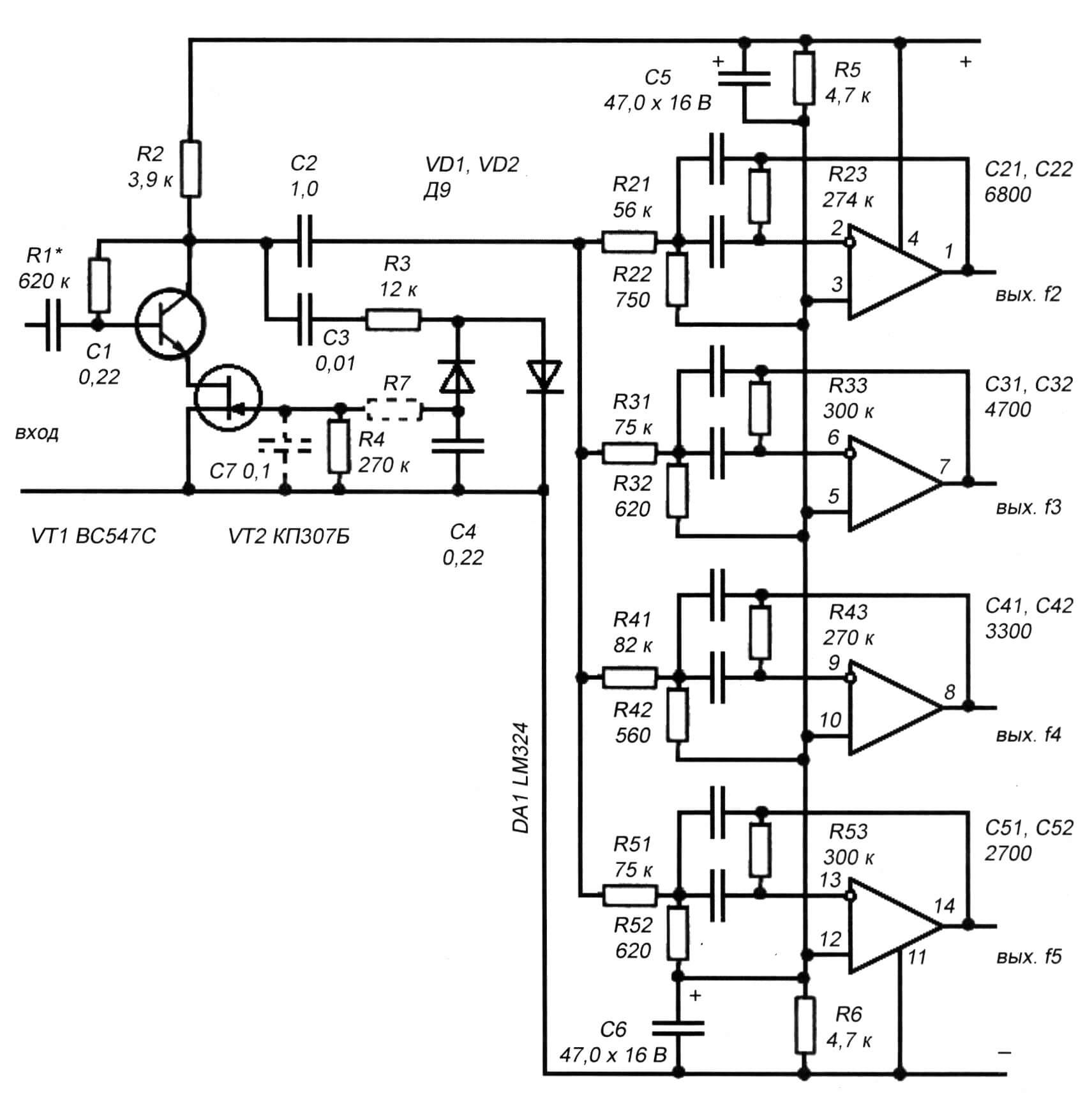
Вместо резистора R7 на плате ставится перемычка, а С7 не устанавливается. Возможность установки этих элементов предусмотрена на случай необходимости поднять уровень сигнала. В этом случае R7 и R4 образуют делитель напряжения детектора, благодаря которому система АРУ не станет спешить вступать в работу.
Фильтры выполнены на ОУ по классической схеме. Использован счетверенный ОУ типа LM324 — экономичный и неприхотливый по питанию. Использованная схема фильтра требует подключения не инвертирующего входа ОУ к средней точке питания. Она создана цепочкой R5, R6, С5, С6. Это может показаться странным — зачем создавать искусственную среднюю точку, если она и так уже есть в источнике питания? Однако работа моторов в том или ином одном плече источника питания приводит к несимметричному «сотрясению» питания импульсами помех, которые таким образом могли бы появиться и на выходе фильтров. Кроме того, такое решение делает дешифратор более независимым, способным работать в аппаратуре с однополярным питанием.
О ДЕТАЛЯХ
В качестве VT1 можно использовать отечественные транзисторы КТ3102 с индексами Б-Е. Требования к VT2 следующие: это должен быть полевой транзистор с n-каналом, с начальным током стока не менее 1,5 мА и напряжением отсечки не более 2 В. Диоды системы АРУ (чтобы уровень сигнала не стал чрезмерно большим) должны быть чувствительные, германиевые. Кроме диодов Д9 с любым буквенным обозначением годятся также ГД507.
Налаживание ведется при напряжении питания 7,5 В.
Подбором R1 добейтесь, чтобы напряжение на коллекторе VT1 составляло примерно половину напряжения питания.
Настройка фильтров сводится к подбору резисторов для получения нужной частоты. Сделать это и даже снять частотные характеристики фильтров будет нетрудно, если имеются звуковой генератор и частотомер (например, в цифровом мультиметре). Надо только знать, что уменьшение любого резистора в фильтре увеличивает его резонансную частоту, а увеличение — уменьшает. Я выбрал следующую тактику: измерял емкость конденсаторов мультиметром и если она оказывалась меньше номинала (увы, современные миниатюрные керамические конденсаторы, как оказалось, часто обладают недостаточной емкостью), то округлял сопротивление резистора до стандартных значений в сторону увеличения. Если же емкость была достаточно точной, то округлял до ближайшего значения. Затем определял резонансную частоту фильтра и при необходимости регулировал ее, по возможности приближая значения резисторов к расчетным. Сопротивления, не соответствующие стандартным, получал последовательным сопротивлением двух подходящих резисторов. Расчетные значения и то, что фактически установлено в авторском экземпляре, приведены в таблице.
| Резистор | Расчетное значение | Фактическое |
| R21 | 58,5к | 56к |
| R22 | 741 | 750 |
| R23 | 292к | 274,7к (270к+4,7к) |
| R31 | 71,6к | 75к |
| R32 | 597 | 620 |
| R33 | 287к | 300к |
| R41 | 84,3к | 82к |
| R42 | 597 | 560 |
| R43 | 287к | 270к |
| R51 | 75,4к | 75к |
| R52 | 628 | 620 |
| R53 | 302к | 300к |
Если же у вас вообще нет никаких приборов, кроме обычного стрелочного тестера, то используйте для фильтра то, что указано на схеме, а потом настройте генераторы шифратора на эти частоты. Подробнее эта процедура будет описана ниже.
МОДУЛЬ УСИЛИТЕЛЯ РУЛЕВЫХ МАШИНОК
Сигналы с каждой пары фильтров далее поступают на усилители рулевых машинок — модули УРМ. Понятно, что характеристики фильтров далеко не идеальны, и на их выходах присутствует также некоторое напряжение сигналов с соседних каналов. Однако входные кремниевые транзисторы модулей УРМ работают без начального смещения, плюс еще и потери напряжения на диодах детекторов. Все это приводит к тому, что сигналы с амплитудой менее 0,5 В усилители вообще не чувствуют.
Таким образом, при правильной настройке системы АРУ, сигналы соседних каналов, прочие шумы и помехи оказываются в зоне нечувствительности, тогда как на свои сигналы входные транзисторы открываются полностью. В этом случае ток соответствующего плеча определяется только сопротивлением резисторов R3, R4, и результирующее напряжение зависит только от соотношения времени работы верхнего и нижнего плеча, а не от каких либо отклонений уровня сигнала. Сглаживание последовательности постоянно переключающихся уровней и превращение его в то или иное постоянное управляющее напряжение производится с помощью конденсаторов большой емкости С5 и С6.
Итак, мы имеем на базах транзисторов VT3, VT4 некое управляющее напряжение, положительное относительно средней точки источника питания, если рули необходимо переместить в одну сторону, и отрицательное, если их необходимо переместить в противоположную. Важно, чтобы эта часть схемы также имела некоторую зону нечувствительности, чтобы, когда рули установятся в требуемое положение, ток через мотор рулевой машинки прекратился. А также, чтобы избежать одновременного открытия VT5, VT6 и фактического замыкания источника питания. Поэтому транзисторы VT3, VT4 также работают без начального смещения, что обеспечивает наивысшую экономичность и термостабильность всего модуля. Однако зона нечувствительности не должна быть слишком большой, иначе это приведет к увеличенному «электронному люфту».
Что же происходит дальше? Управляющее напряжение включает соответствующий мощный транзистор, рулевая машинка начинает отклонять рули и одновременно встроенный в нее переменный резистор обратной связи, начинает создавать все большее компенсирующее напряжение с противоположной относительно средней точки полярностью. Когда оно сравняется с управляющим напряжением, потенциал на базах VT3, VT4 обнулится по отношению к средней точке, и мотор рулевой машинки выключится. Изменится входное управляющее напряжение — система вновь приведет его к нулю, но баланс наступит уже в другом положении рулей. Таким образом, поступающее по каналу связи напряжение определяет положение рулей.
А как же управлять не рулями, а ходовыми моторами? Да точно так же! Благо, выходные транзисторы модуля УРМ достаточно мощные, особенно если установить их на радиаторы. Просто подключите к модулю только один мотор, оставив входы подключения переменного резистора обратной связи пустыми.
Детали: мощные выходные транзисторы BD136 можно заменить на BD138 или на старые советские КТ814 с индексами A-В. Соответственно, в качестве VT6 можно применить BD137 или КТ815А-В.
Для отклонения рулевых поверхностей можно использовать машинку советской системы «Новопроп». Она имеет пять выводных проводов: два — от моторчика и три — от переменного резистора обратной связи. Если же вы используете современную импортную аналоговую рулевую машинку (у автора ES08MA II) с тремя выводами, то проще будет выкинуть управляющую плату и вывести отдельно пятью проводками выводы потенциометра и мотора.

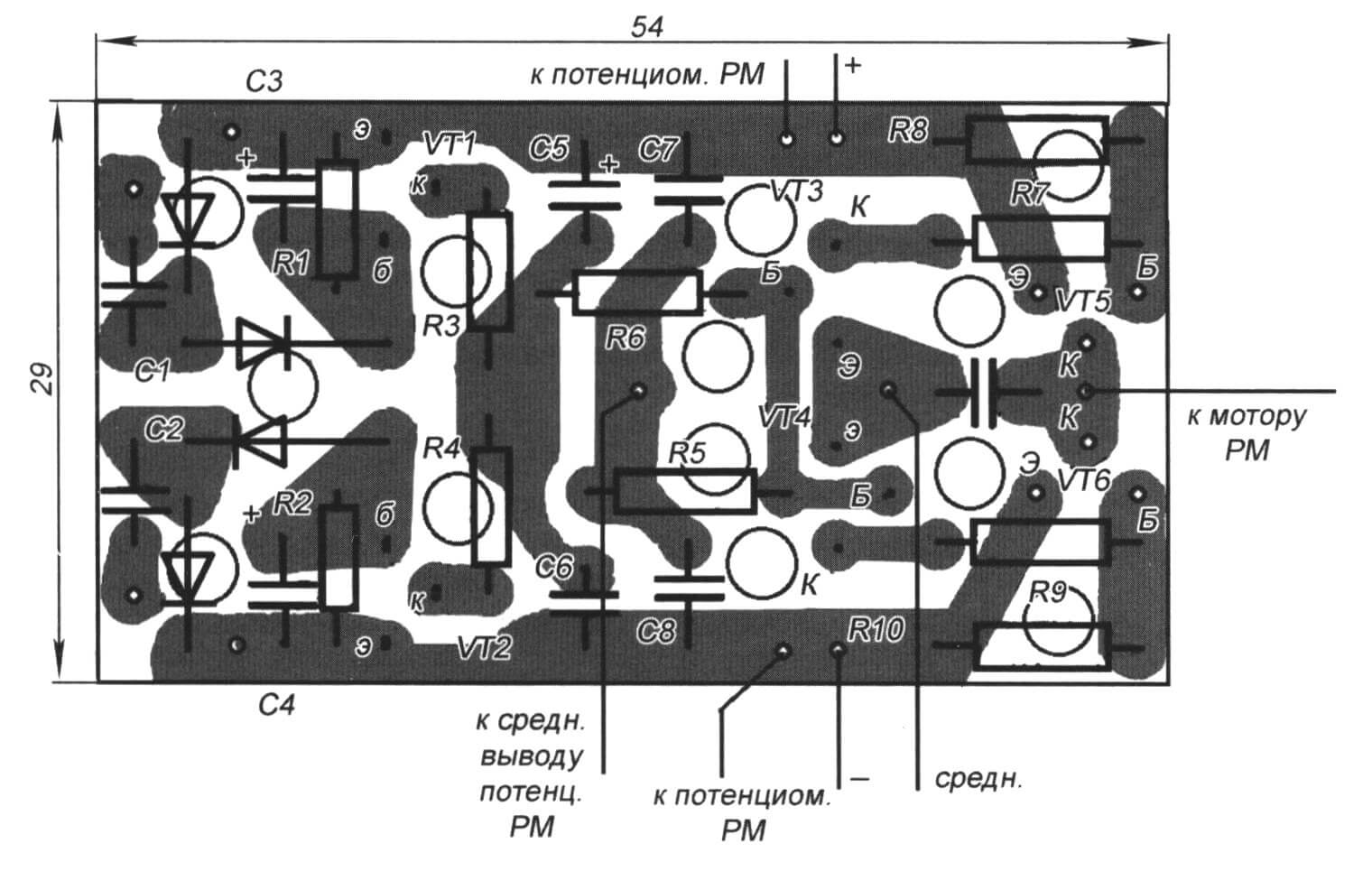
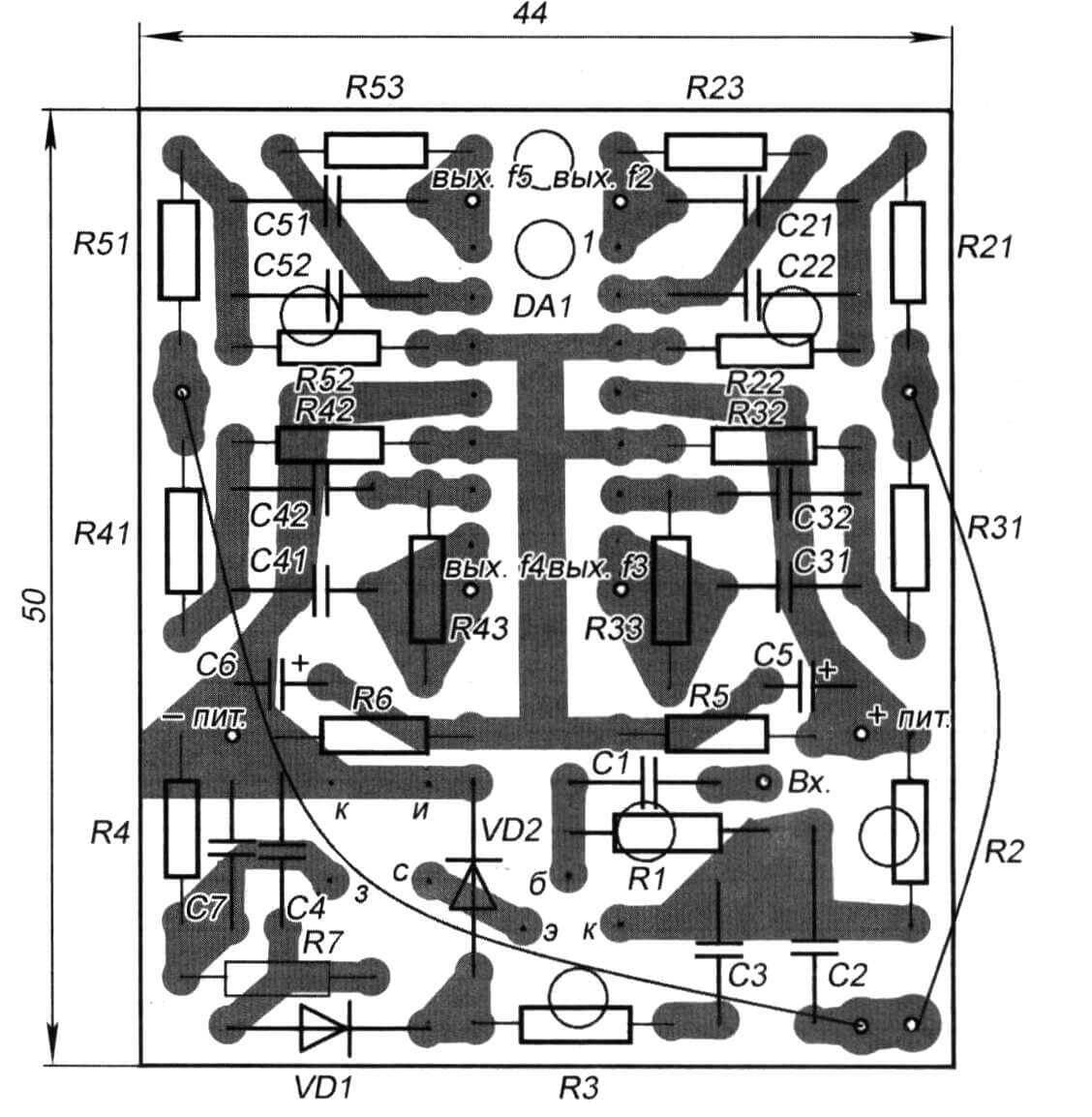
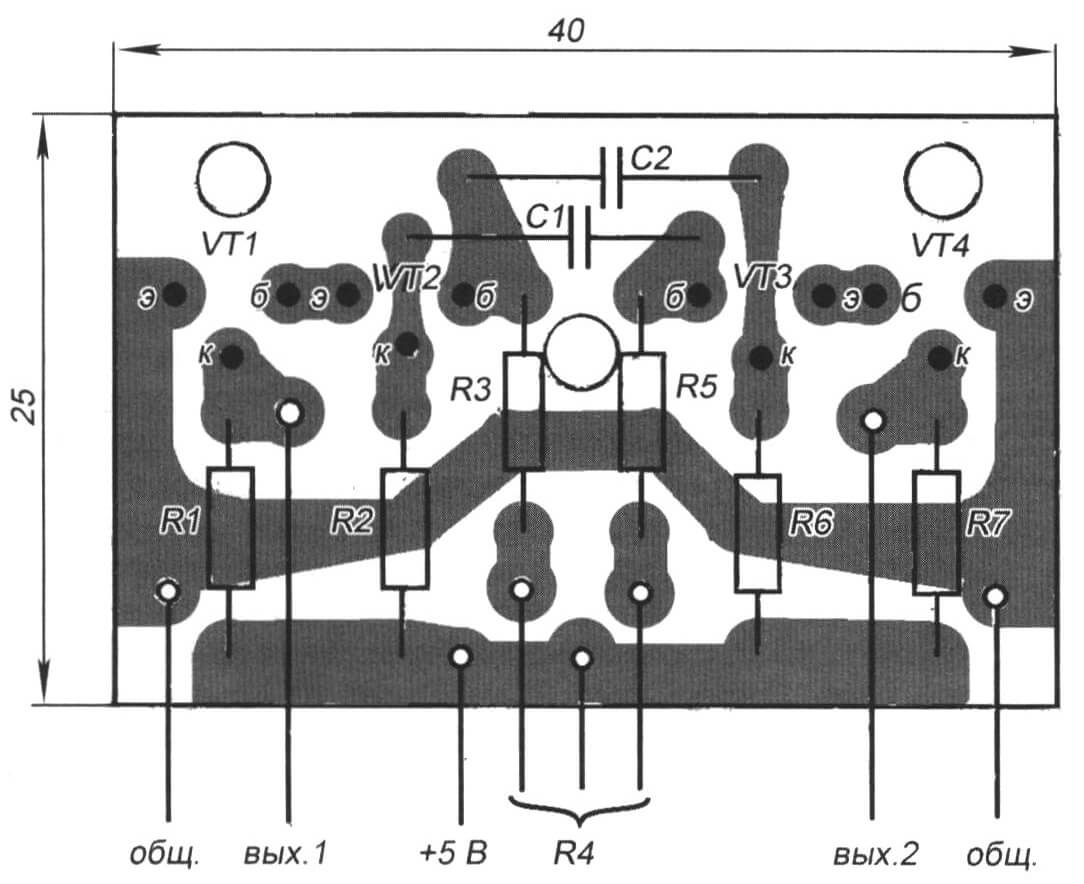
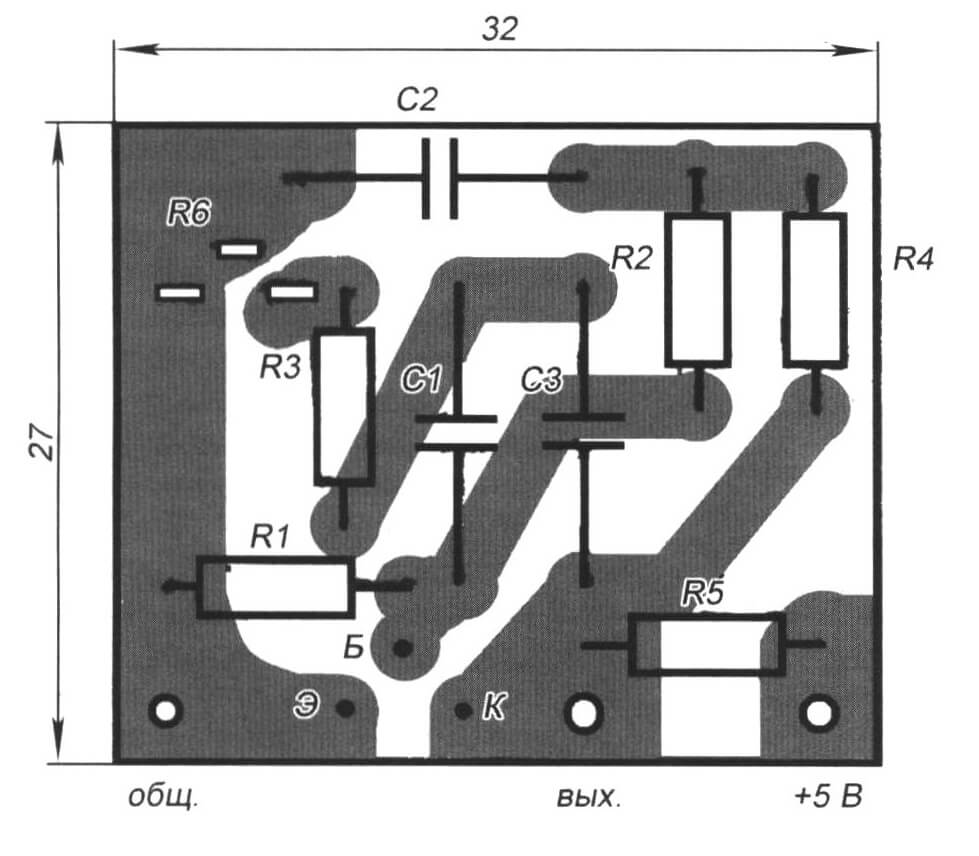
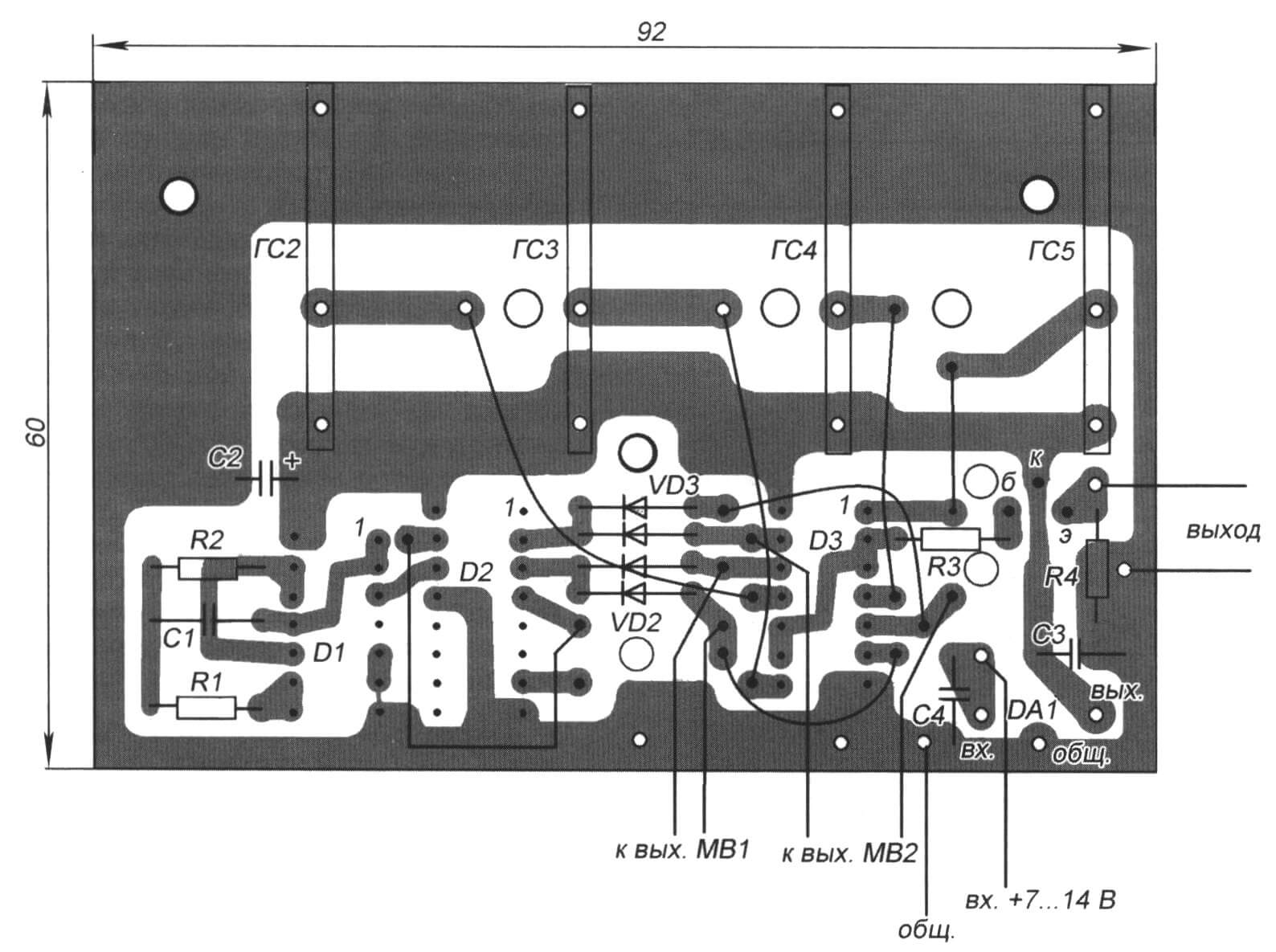
Обратите внимание: на печатных платах модулей бортовой аппаратуры, на участках свободных от проводников сверлится множество отверстий диаметром 3,2 мм. Выгод от этого множество. Это позволит при изготовлении платы сэкономить раствор для травления, облегчить готовый модуль, улучшить охлаждение деталей, снизить паразитные емкости, а отверстия можно использовать для крепления платы и проводки.
Собранная плата УРМ, если она используется для управления ходовыми моторами, налаживания вообще не требует. Если же она управляет не ходовыми моторами, а рулевыми машинками, то необходимо соблюсти соответствие полярностей мотора и переменного резистора обратной связи. Чтобы у вас получилась отрицательная, а не положительная обратная связь.
Для налаживания вам понадобится дополнительный переменный резистор сопротивлением 1,5-10 кОм. Крайние его выводы подключите к плюсу и минусу 9-вольтового источника питания, а вывод движка — к коллектору VT1 или VT2 (безразлично). Все равно, если на вход модуля УРМ не подано никаких сигналов командных частот, то входные транзисторы закрыты и ни на что не влияют. Поверните переменный резистор примерно в среднее положение и включите питание. (Не забудьте подключить не только плюс и минус питания, но и среднюю точку). При правильной полярности машинка установится примерно в среднее положение, а при неправильной — уедет в крайнее. Проблема состоит в том, что на «новопроповской» машинке понятно по положению движка, в каком она положении, а в машинках с вращающимся выходным валом это не видно. Поэтому покрутите ручку переменного резистора. Машинка должна поворачиваться вслед за ее движениями. Если этого нет или же в каких-либо положениях машинка начинает дергаться туда-сюда — меняйте местами крайние выводы потенциометра рулевой машинки.
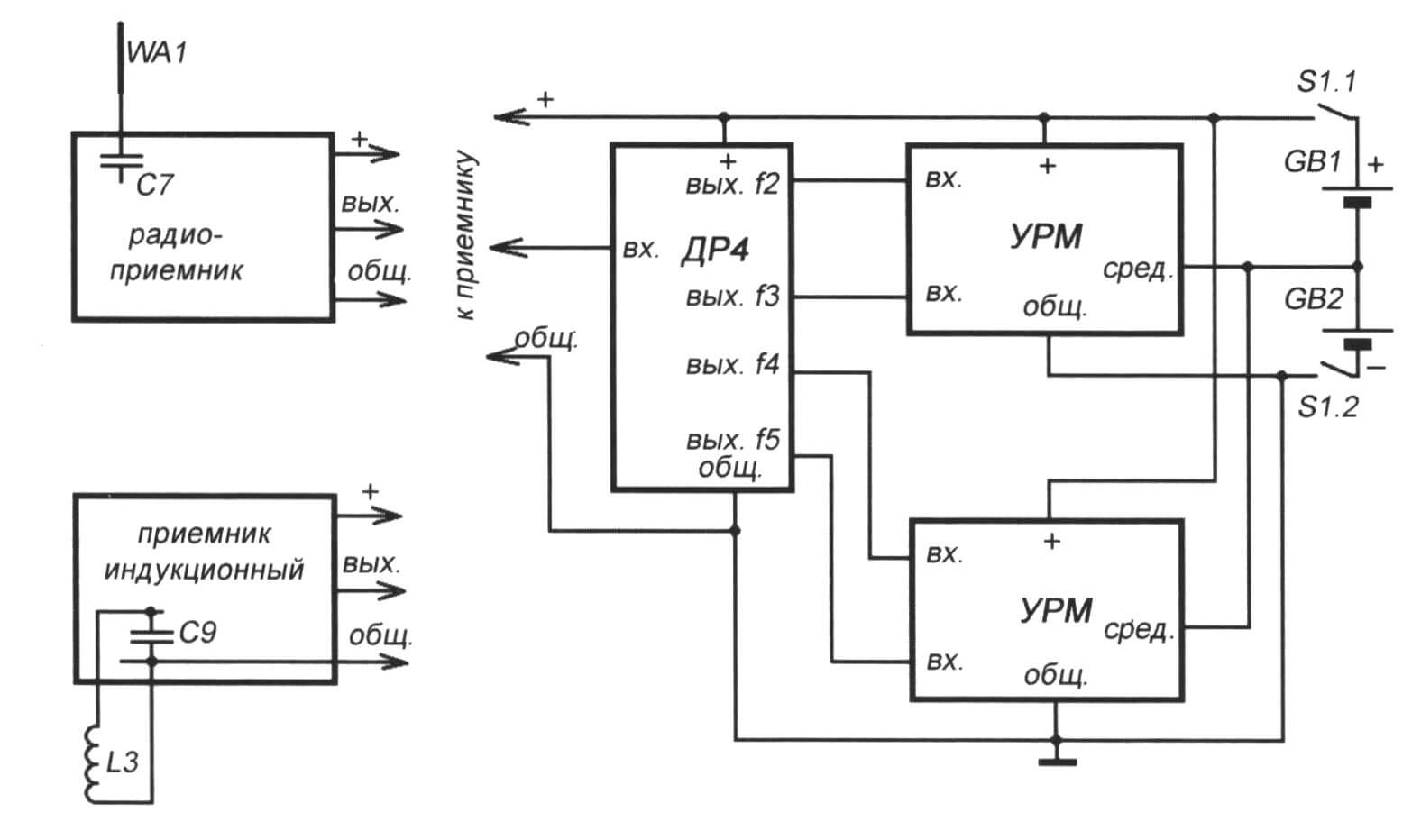
Схема соединения модулей бортовой приемной части модели показана на рис. 6. О вариантах приемников и передатчиков, обеспечивающих связь между шифратором пульта управления и дешифратором на модели, будет рассказано ниже.
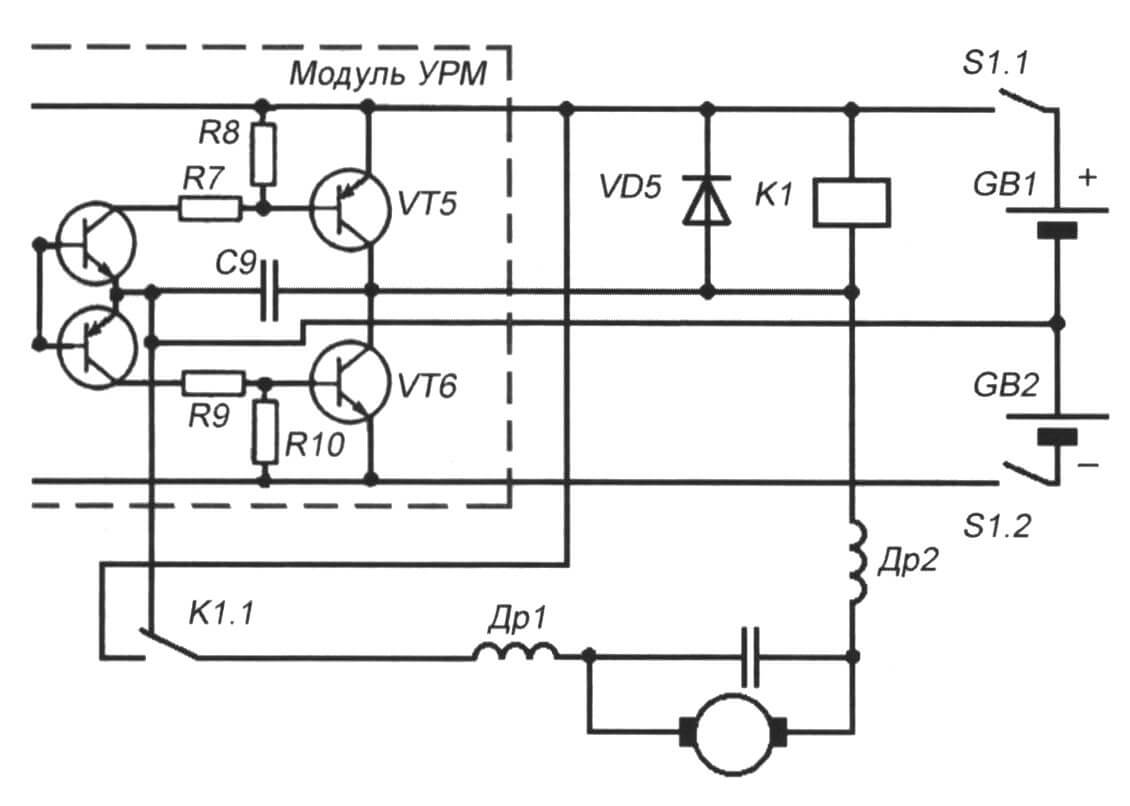
Данная система подает на моторы напряжение только одного плеча источника питания. Однако в авто- или судомоделях обычно максимальная мощность требуется только при ходе вперед, а назад можно удовольствоваться меньшей мощностью. Такой режим можно легко осуществить с помощью дополнительного реле с одной группой контактов на переключение, срабатывающего при напряжении 5 — 6 В. Когда при ходе вперед транзистор VT6 выдаст достаточное выходное напряжение, реле сработает и переключит второй вывод мотора со средней точки на положительный полюс питания, приложив, таким образом, к мотору напряжение обеих батарей. Диод VD5 — стандартная защита от ЭДС самоиндукции обмотки реле.
ПЕРЕДАТЧИК
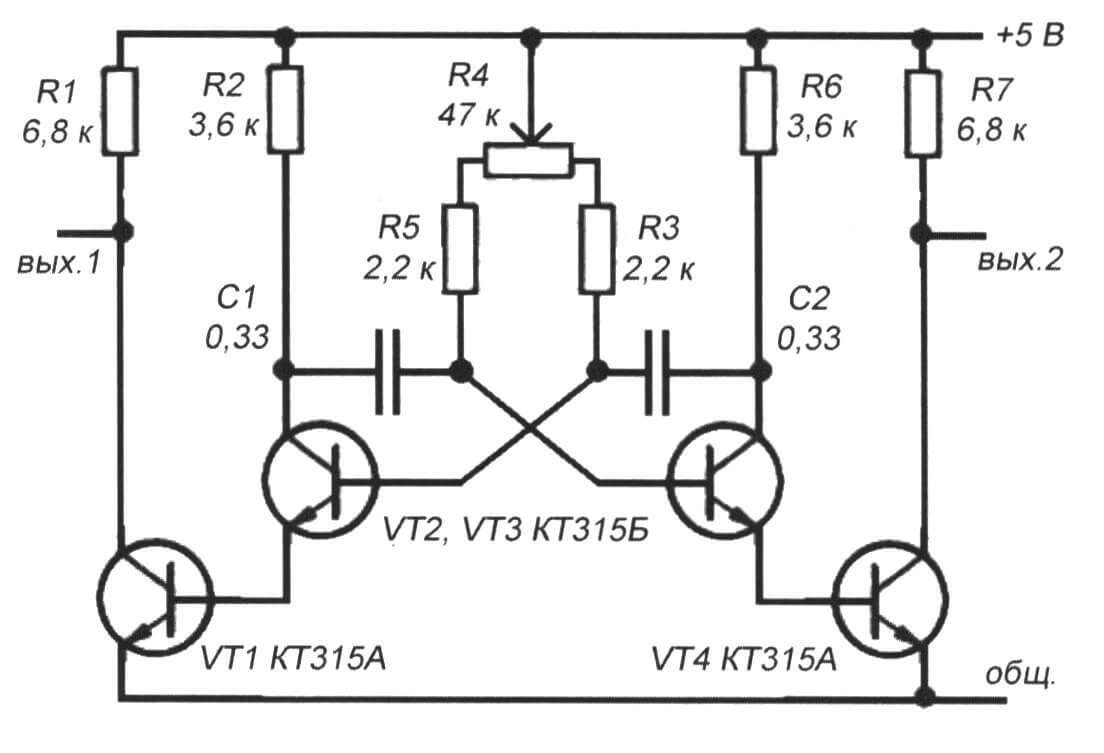
Теперь о передающей части. Ну, это мы и сами быстро, — подумают иные читатели, взглянув на временную диаграмму работы системы, и нарисуют в своем воображении схему из мультивибраторов на логических элементах и цифрового мультиплексора. Однако использование прямоугольных импульсов приводит к повышенному уровню гармоник, что расширяет спектр передаваемых частот и может привести к срабатыванию более высокочастотных фильтров от сигналов более низкочастотных каналов. К тому же мультивибраторы на логических элементах не столь стабильны по частоте. Поэтому применены генераторы колебаний, близких к синусоидальным, а используемый аналоговый коммутатор сохраняет форму колебаний.
Ориентировочные значения емкостей конденсаторов модулей ГС
| № частоты | Частота, кГц | С1,С3 | С2 |
| 2 | 1,6 | 3300 | 0,022 |
| 3 | 2,9 | 2700 | 0,01 |
| 4 | 3,6 | 2200 | 0,01 |
| 5 | 4,3 | 2000 | 7500 |
Общая схема шифратора (рис. 10) содержит задающий мультивибратор на D1 и счетчик D2, обеспечивающие последовательный опрос каналов. А также коммутатор на D3, включающий нужный из 4 командных тонов. Вход сброса счетчика соединяется с его выходом перемычкой из монтажного провода. Таким образом, если перебросить этот провод на следующий выход, то не исключается возможность преобразования системы в трехканальную. Выходные транзисторы модулей МВ совместно с диодами VD1 — VD4 образуют своеобразные логические элементы «И». Таким образом, для включения каждого тона должно соблюдаться два условия — нужная фаза с мультивибратора МВ, а также включение данного канала счетчиком D2. Только при совпадении этих условий на управляющий вход коммутатора поступит логическая 1, и соответствующий тон будет отправлен на передачу. От выхода системы коммутатор отделен буферным эмиттерным повторителем на VT1. Тональные генераторы обладают хорошей стабильностью частоты, а для мультивибраторов, как уже было указано, точное соблюдение частоты необязательно. Тем не менее, для хорошей стабильности работы аппаратуры, непосредственно на плате установлен 5 В стабилизатор DA1, от которого и питаются все узлы шифратора. Таким образом, передатчик может использовать любые источники питания напряжением 7 — 14 В.
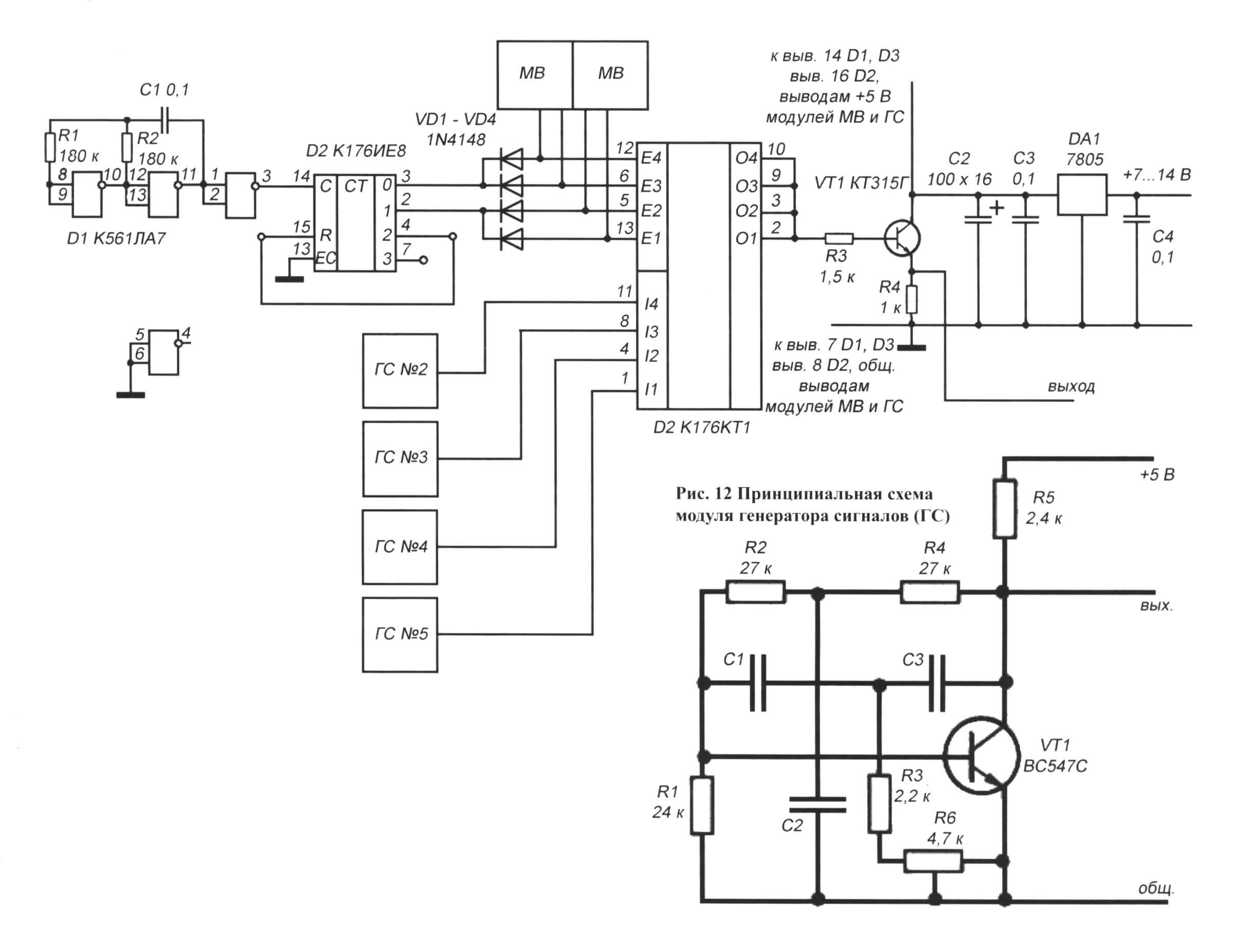
В качестве VT1 могут быть использованы те же типы транзисторов, что и в модулях МВ. К типам диодов шифратор также нетребователен. Можно использовать любые из типов, примененных в приемных модулях аппаратуры. Микросхему-стабилизатор можно использовать отечественную КР142ЕН5А. Микросхема-коммутатор D3 может быть заменена на импортный аналог CD4016.
Платы модулей ГС устанавливаются вертикально прямо на основной плате шифратора. Недостатком платы является то, что не все связи удалось развести печатными проводниками. Однако это позволяет изменять конфигурацию системы, о чем будет рассказано ниже. Один из логических элементов микросхемы D1 не используется. Чтобы предотвратить его выход из строя из-за накопления статического заряда, входы этого элемента соединены с общим проводом. Но эта перемычка тонкая, в случае необходимости задействовать этот логический элемент может быть легко перерезана. В качестве D1 годится также К176ЛА7, а при соответствующем изменении печатного монтажа может быть использована любая КМОП микросхема, содержащая не менее трех логических элементов с инверсией.
Модули МВ располагаются вблизи ручек управления.
В корпусе пульта управления устанавливаются только шифратор и источник питания. Днище и дальняя от оператора стенка пульта должны быть металлическими и соединенными с общим проводом. Передатчик (радио или ИК) монтируется в небольшом отдельном корпусе, который крепится снаружи этой стенки.
Впрочем, автору случалось игнорировать некоторые из этих мер при сохранении работоспособности аппаратуры, что свидетельствует об известном запасе ее устойчивости.
ОКОНЧАТЕЛЬНАЯ НАСТРОЙКА СИСТЕМЫ
Частоты генераторов сигналов ГС настраиваются по частотомеру на частоты фильтров дешифратора. Если же вы не располагаете такими приборами, то просто настройте генераторы на те частоты, которые получились у фильтров. Это можно делать с отдельными платами модулей ГС, еще не установленными на основную плату шифратора.
Подключите к выходу соответствующего фильтра тестер, включенный на наименьший предел измерения переменного напряжения. Подключать его следует через конденсатор емкостью в несколько десятков микрофарад, чтобы прибор не показал постоянную составляющую выходного напряжения. Подстроечным резистором R6 настройте генератор по максимуму сигнала на выходе фильтра. Если подстроечный резистор дошел до упора, а резонансный пик не наступил, то меняйте конденсаторы модуля ГС на соседние номиналы. Меньшие, если максимум в положении минимального сопротивления, и большие, если сопротивление подстроечника уже дошло до максимума, но частоту надо снизить еще немного. Проверьте, нет ли взаимных помех между частотами. Если они есть, выясните, между какими именно, и соответственно подвиньте одну из частот.
Входные транзисторы модуля УРМ, в отличие от потенциометра рулевой машинки, не могут перемещать управляющее напряжение в точке соединения С5, С6 от питания до питания. Поэтому диапазон перемещения рулевой машинки будет неполным. Чтобы скомпенсировать это, подключайте крайние выводы потенциометра обратной связи в рулевой машинке к шинам питания через резисторы в несколько сотен Ом (зависит от сопротивления потенциометра). Для ориентира — у автора наилучшие результаты получились при сопротивлении 430 Ом.
Еще один совет: из-за очень низких частот командных тонов канал А работает не так точно, как более высокочастотные. Поэтому, если вы делаете авто- или судомодель с ходовыми электромоторами, то подключайте рули к каналу Б, а управление моторами — к каналу А.
Хороший способ проверки работы приемной части аппаратуры — подключите вольтметр к точке соединения С5 и С6 модуля УРМ, где как раз и формируется управляющее напряжение. Затем поверните ручку на пульте шифратора от края до края. Если напряжение меняется в пределах не менее, чем 2,5 — 5 В — все в порядке. Если же напряжение сильно не доходит до одного полюса питания — проблемы в тракте той частоты, входной транзистор которой (VT1 или VT2) подключен к этому полюсу эмиттером.
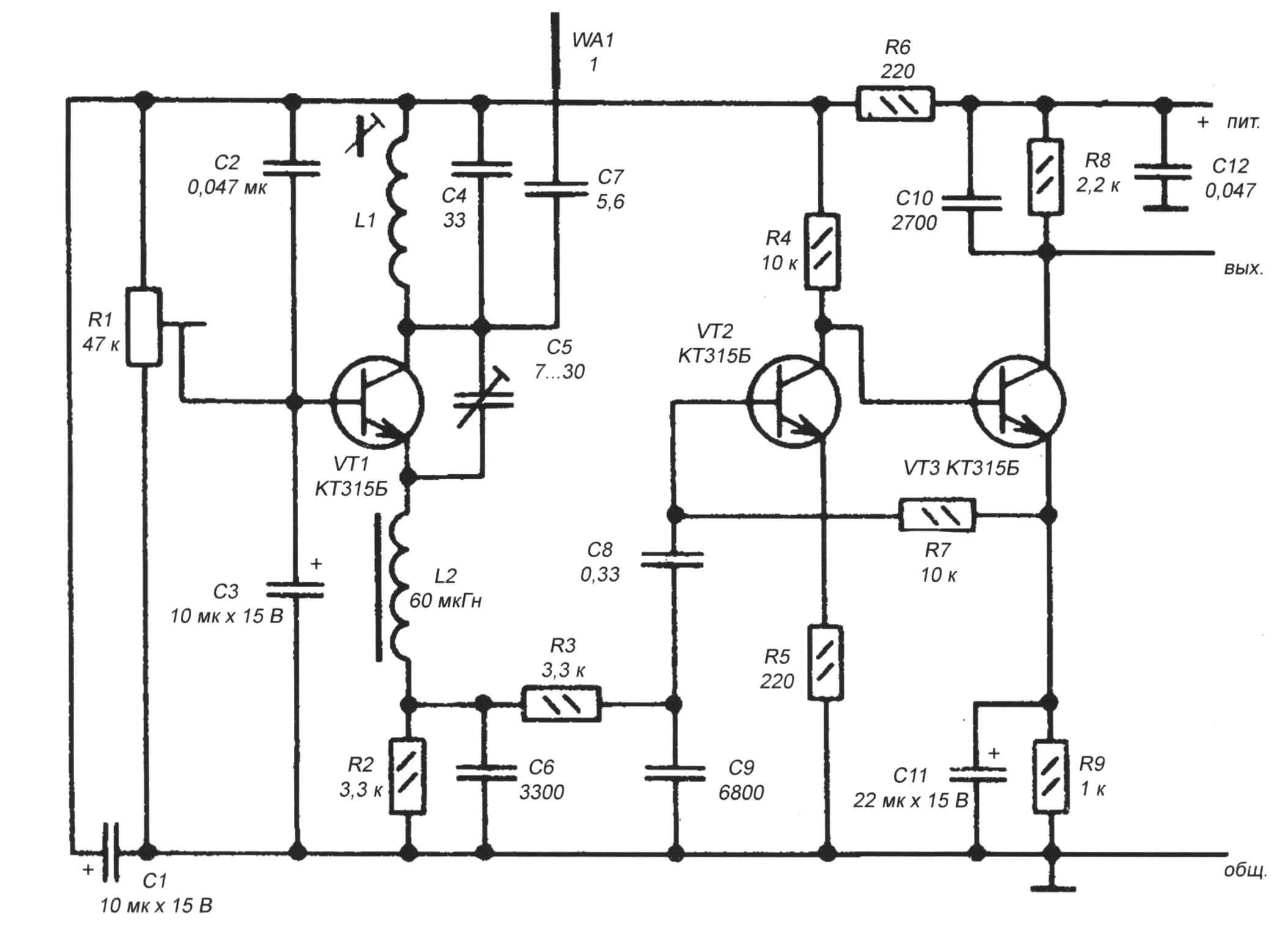
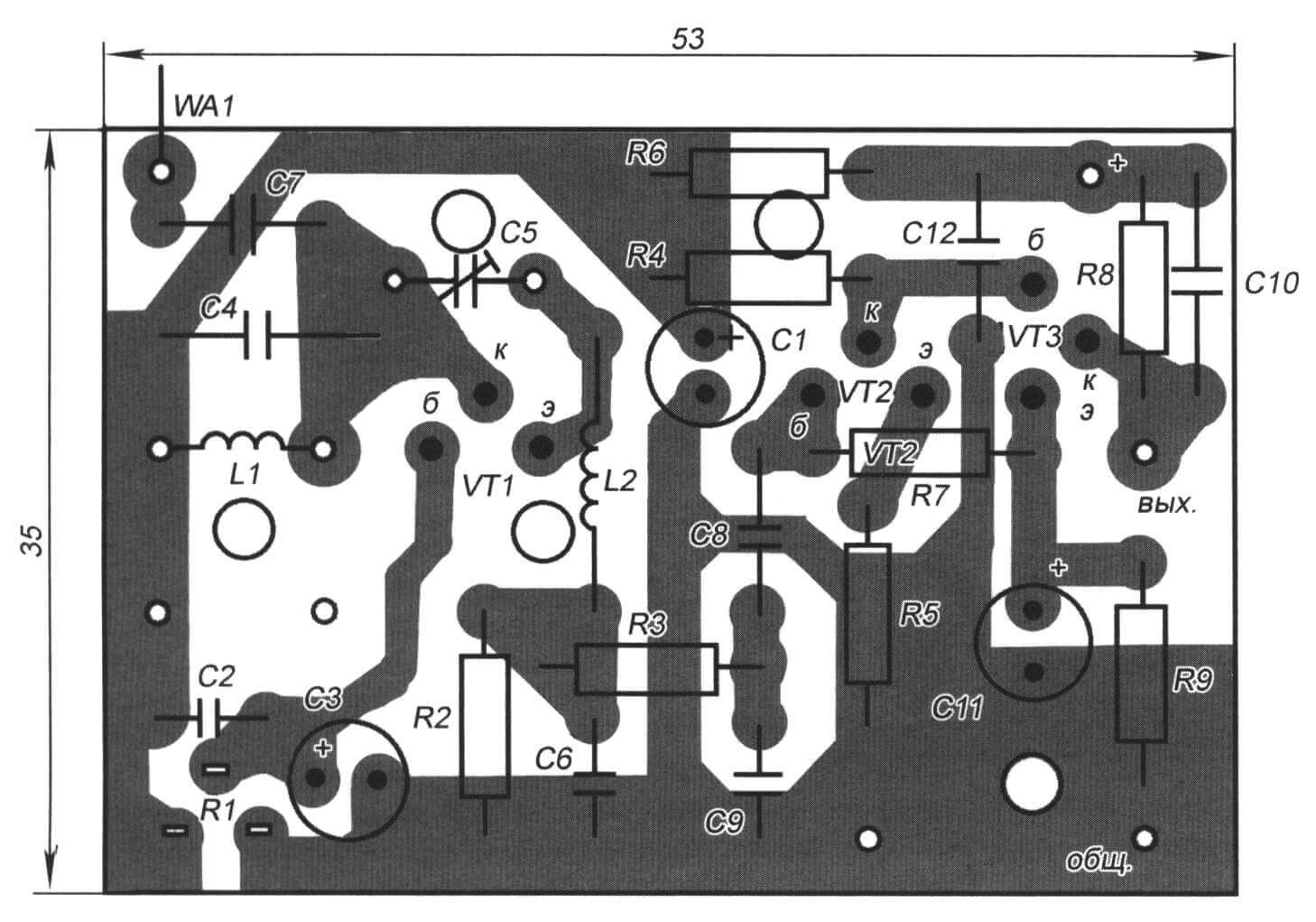
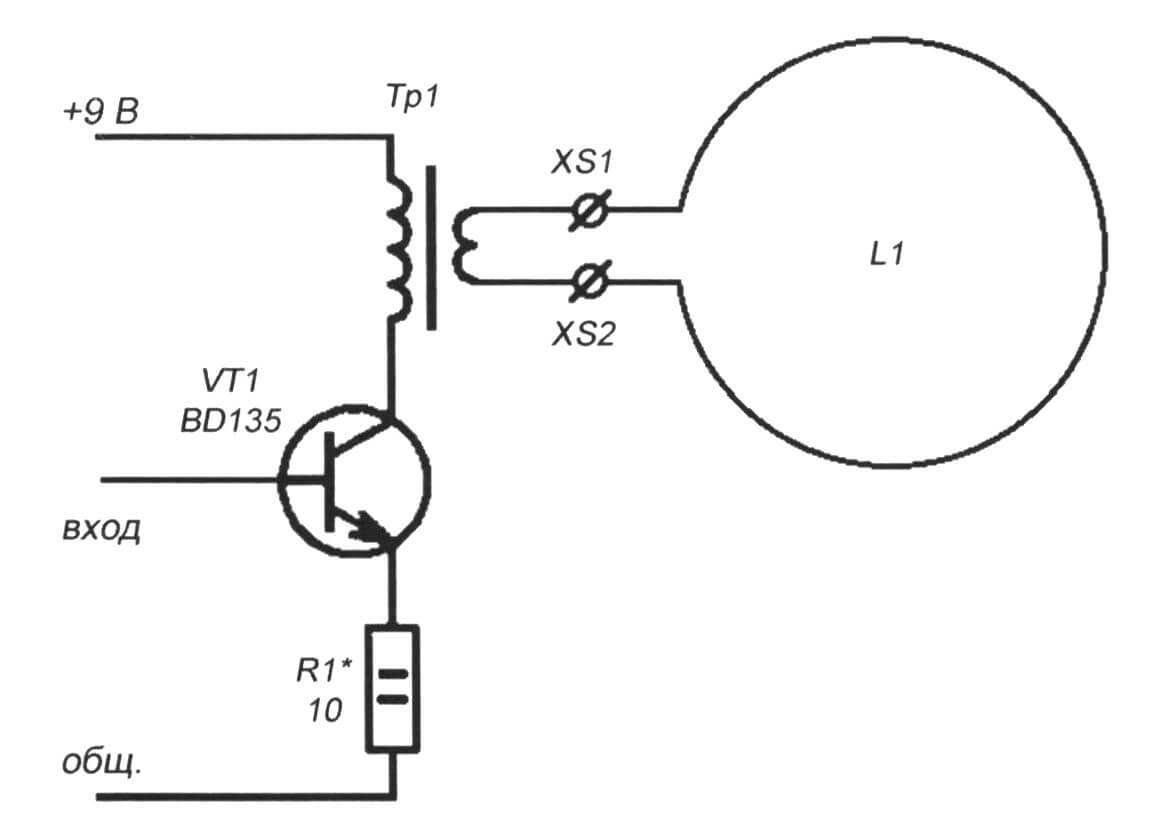
Схема приемника для управления моделью по радио приведена на рис. 12. Катушка L1 наматывается на стандартном каркасе диаметром 7 мм с подстроечным сердечником 02,8×12мм и содержит 8,5 витков провода диаметром около 0,23 мм. Для уменьшения паразитной емкости и снижения риска межвиткового замыкания хорошо бы найти для катушек приемника провод ПЭЛШО в шелковой оплетке. Дроссель намотан на резисторе МЛТ-0,5 сопротивлением не менее 500 кОм и содержит 85 витков провода диаметром 0,14 мм.
Автор на всякий случай сохранил от исходной конструкции подстроечный резистор R1. Настройте его так, чтобы напряжение на базе VT1 было немного больше половины напряжения источника питания. Подстроечный конденсатор С5 установите в среднее положение (металлизированный сектор сбоку от ножек). Подключите к выходу приемника наушники, желательно высокоомные, и расположите антенну приемника рядом с антенной передатчика. Наверняка у большинства начинающих радиолюбителей не окажется никаких приборов для настройки аппаратуры на диапазон, отведенный для управления моделями. Поэтому позаимствуйте на время передатчик от какой-нибудь китайской радиоуправляемой игрушки диапазона 27 или 28 — 28,2 МГц, а потом настроим наш передатчик по уже настроенному приемнику.
Итак, вращением сердечника L1 с помощью немагнитной диэлектрической отвертки (например, из полоски оргстекла или текстолита) настройте приемник на частоту передатчика. На всякий случай уточните настройку R1. Суть в следующем. Сверхрегенеративный приемник при правильном режиме создает характерный суперный шум в отсутствие сигнала. Но при появлении сигнала этот шум должен пропадать. Поэтому важно настроить этот резистор так, чтобы вы слышали сигнал передатчика пусть не с максимальной громкостью, но чистый, не загрязненный шипением. Хорошо, если у вас будет осциллограф — на нем это хорошо видно.
При неправильной настройке, хотя вы и будете слышать в наушниках характерный сигнал передатчика, но в беспорядочном шуме на выходе приемника вы не различите сигнала на экране осциллографа. Дешифратор в таком сигнале тоже не разберется. Затем будем настраивать режим сверхрегенерации подстроечным конденсатором С5 по максимуму сигнала. Чтобы емкость рук и отвертки не влияла на настройку, двигайте ротор конденсатора небольшими движениями и сравнивайте уровни сигнала после того, как уберете отвертку. Эта настройка немного сдвинет настройку контура, поэтому периодически проверяйте настройку L1. По мере улучшения приема отодвигайте приемник от передатчика, чтобы ограничение сигнала не мешало вам ощущать изменения его уровня. Закончив настройку, зафиксируйте подстроечник L1 каплей расплавленного парафина.
Что касается передатчика, то с этой неприхотливой системой можно использовать что угодно, способное излучать в заданном диапазоне. Достаточно только соединить выход шифратора со входом модуляции передатчика. От его мощности и будет зависеть дальность связи.
МЕРЫ ПО ПОДАВЛЕНИЮ ПОМЕХ
Это особенно важно при работе с радиочастотным каналом управления.
Приемная часть: поскольку имеющиеся в модулях конденсаторы большой емкости осуществляют блокировку только между крайними полюсами источника питания, полезно установить на борту модели также и конденсаторы емкостью не менее 100мкФ между средней точкой питания и обоими полюсами. Для подавления помех от электромоторов следует включать их через дроссели Др1 и Др2. Сделать их можно, намотав 50 — 60 витков проводом диаметром не менее 0,23 мм на резисторах МЛТ-0,5 сопротивлением не менее 200 кОм или на сгоревших плавких предохранителях, в торцы которых впаяны проволочные выводы. Это особенно важно в отношении мощных ходовых двигателей, тогда как рулевые машинки могут обходиться и без этого.
Непосредственно к выводам моторов (неважно, ходовых или в рулевых машинках) следует подключить конденсаторы С10 емкостью не менее 0,033 мкФ.
Провод от приемника к дешифратору должен быть экранированным или витым.
(Продолжение следует)
А. ЛИСОВ
Рекомендуем почитать
 Как всегда иметь высокий рейтинг и быть вежливым водителем с постоянными заказами и хорошим заработком?
Как всегда иметь высокий рейтинг и быть вежливым водителем с постоянными заказами и хорошим заработком?
Даже начинающие водители, которые только что стали самозанятыми или начали сотрудничать с таксопарком «Зелёный свет» или иным, знают, что рейтинг таксиста во многом зависит от оценок... Ваза из старой лампочки
Ваза из старой лампочки
Знаете, что самое обидное в перегоревшей лампочке? Она перестала светить — и сразу отправляется в мусор, хотя форма у неё уже идеальная. Круглая, аккуратная, почти как мини-ваза, только...