 Что может быть проще и рациональней колеса? Этот вопрос задали себе студенты МВТУ имени Н. Э. Баумана, а ответами на него могут служить экспонаты выставки НТТМ-76, которые вызвали всеобщий интерес посетителей. Интерес этот далеко не случаен: представленные механизмы отличались необычностью, оригинальностью, новизной.
Что может быть проще и рациональней колеса? Этот вопрос задали себе студенты МВТУ имени Н. Э. Баумана, а ответами на него могут служить экспонаты выставки НТТМ-76, которые вызвали всеобщий интерес посетителей. Интерес этот далеко не случаен: представленные механизмы отличались необычностью, оригинальностью, новизной.
Где еще увидишь шестиногое металлическое чудище, которое с деловитым жужжанием шагает, подчиняясь командам оператора? Или ползущую по полу, подобно живой гусенице, громадную машину с решетчатым телом?
…Студенческое проектно-конструкторское бюро (СПКБ) работает i МВТУ около десяти лет. В нем студенты применяют на практике знания, полученные в вузе.
Занятия в СПКБ тесно связаны с учебным процессом. Каждая большая разработка студентов-конструкторов состоит из нескольких курсовых или дипломных проектов. Она объединяет ребят в своеобразные конструкторские бригады, где каждый отвечает за проектирование одного-двух узлов будущего механизма, а в итоге получается вполне законченная машина. От низколета и дельтаплана до необычных транспортных средств — такое творческий диапазон увлечений бауманцев.
Но спроектировать какое-либо устройство — полдела. Конструкцию еще необходимо воплотить в металле, и студенты становятся слесарями, станочниками.
Учебный год студента до предела загружен повседневными делами. Непросто ему с полной отдачей работать в СПКБ. Но почему, собственно, можно заниматься конструированием только в зимние месяцы? А если летом? И по аналогии с ССО — студенческим строительным отрядом — в МВТУ организуется СКО: студенческий конструкторский отряд. Его члены во время третьего летнего семестра проектируют, рассчитывают и изготавливают свои машины.
Некоторые не расстаются с СПКБ и после защиты диплома, а многие выпускники получают распределение на предприятия, где продолжают разработку тем, родившихся еще в СПКБ Проектированием и изготовлением тех самых оригинальных вездеходов, с которых начался наш рассказ, занимается в СПКБ лаборатория транспортных средств. Здесь модели проходят комплекс испытаний, включающий измерение параметров движения, а также наблюдение за поведением машин в необычных условиях — при слабом грунте, на пересеченной местности и т. п. Самостоятельная область исследования — влияние пониженной гравитации на поведение машин, а также использование в транспортных средствах принципов передвижения, заимствованных у живой природы.
ШАГОХОД
Модель машины представляет собой самоходную платформу с шестью оригинальными движителями-ногами. Все они связаны в единую кинематическую цепь с приводом от электродвигателя.
Конструктивно каждая нога — это несложная комбинация из трех механизмов. Ее возвратно-поступательное перемещение осуществляет кулисный механизм. Шарнирный четырехзвенних со скользящей опорой «следит» за тем, чтобы при движении ноги вперед она была поднята, а при движении назад опущена. И наконец, шарнирный параллелограмм обеспечивает плоскопараллельность подъема и опускания «голени».
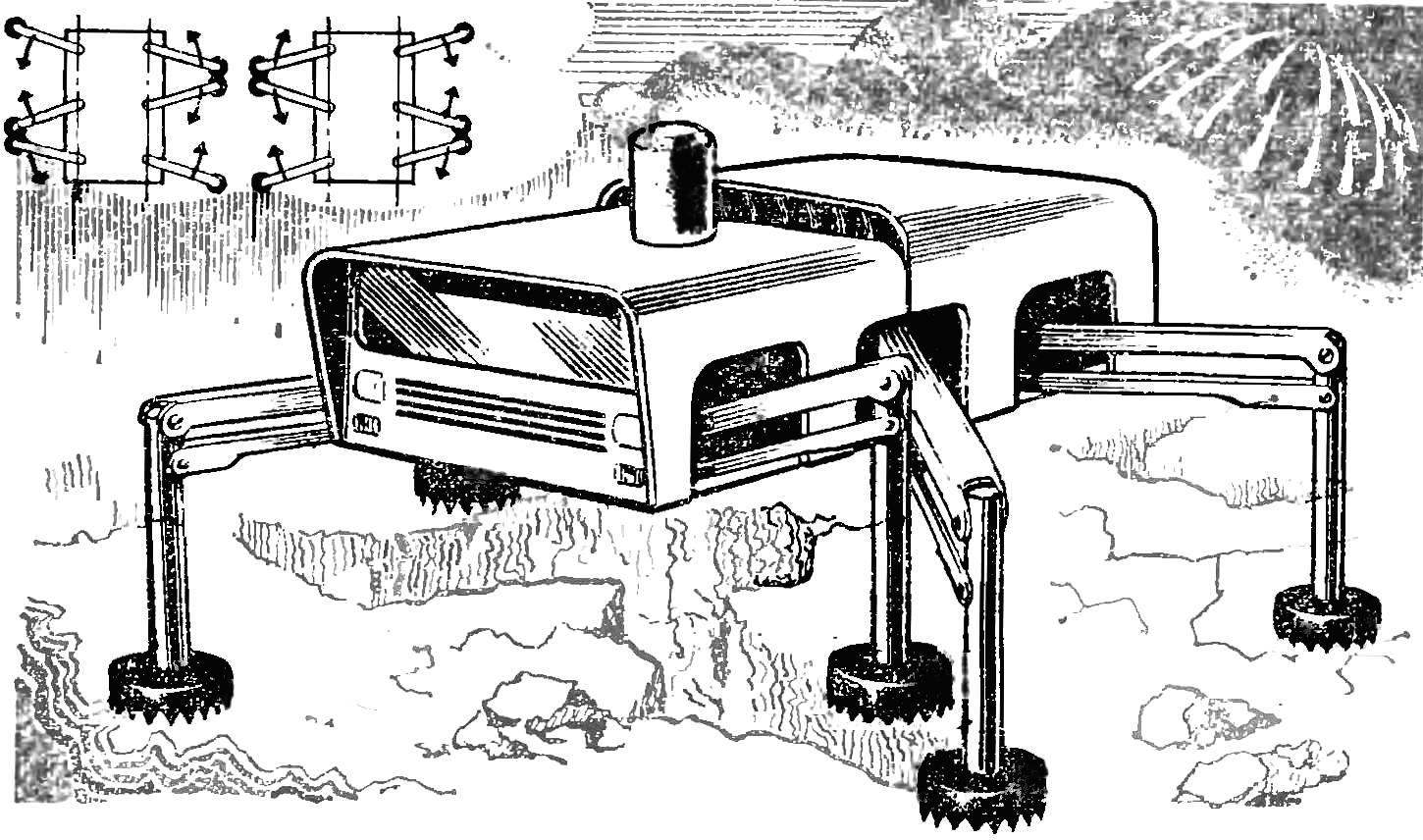
Рис. 1. Шагоход. Слева вверху — фазы движения шагохода.
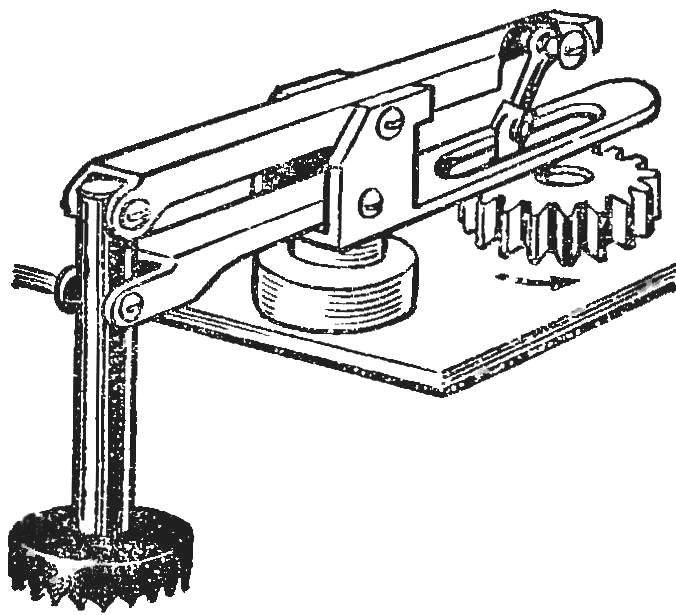
Рис. 2. Конструкция «ноги» шагохода.
Рис. 3. Волноход.
Движение всех ног происходит синхронно, поскольку все они жестко связаны с помощью гитары зубчатых колес. «Походка» машины определяется выбором начальной фазы каждой ноги.
Модель шагохода предназначена для изучения кинематики движения, устойчивости и степени колебаний корпуса в условиях различных «походок», определения энергозатрат на перемещение. Она разработано и построено Б. Мирошниковым, Н. Гончаровым и Е. Степаненко.
МАШИНА-ГУСЕНИЦА
Волноход — такое название эта модель получила за то, что семнадцать ее движителей-рам при перемещении образуют бегущую волну — синусоиду. Разработчики модели заимствовали принцип движения у гусеницы.
Все семнадцать рам волнохода выполнены абсолютно одинаковыми, что дает возможность компоновки транспортного средства такой величины, какое в данный момент необходимо конструктору.
Каждая из рам шарнирно соединена с двумя сидящими на одной оси и совершающими вращательное движение кривошипами. На осях расположены звездочки, которые огибает бесконечная втулочно-роликовая цепь. Таким образом, все звенья кинематически связаны друг с другом.
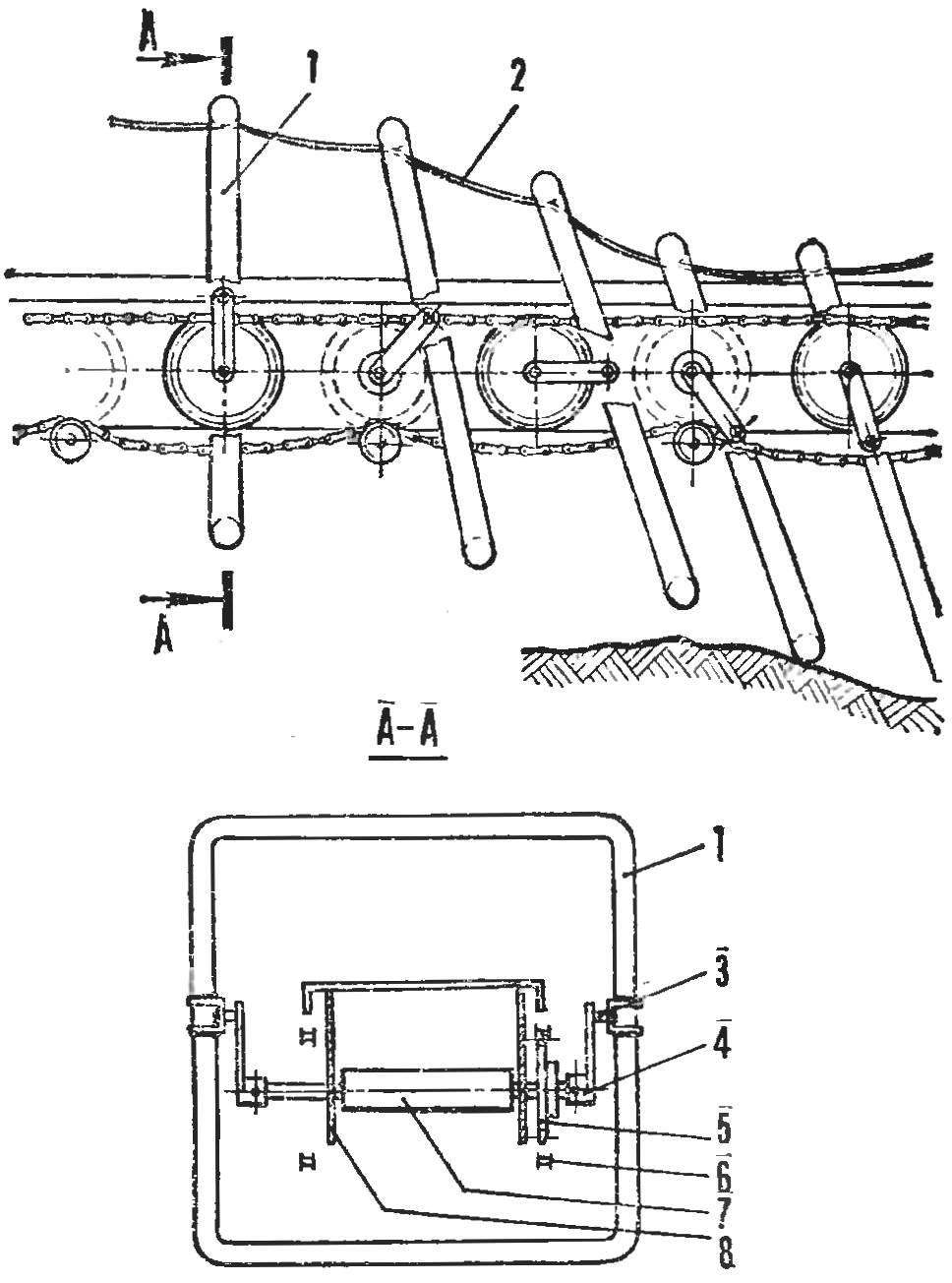
Рис. 4. Конструкция движителя волнохода:
1 — рама движитель, 2 — гибкая лента, 3 — шарнир, 4 — кривошип, 5 — звездочка, 6 — втулочно-роликовая цепь, 7 — вал, 8 — корпус.
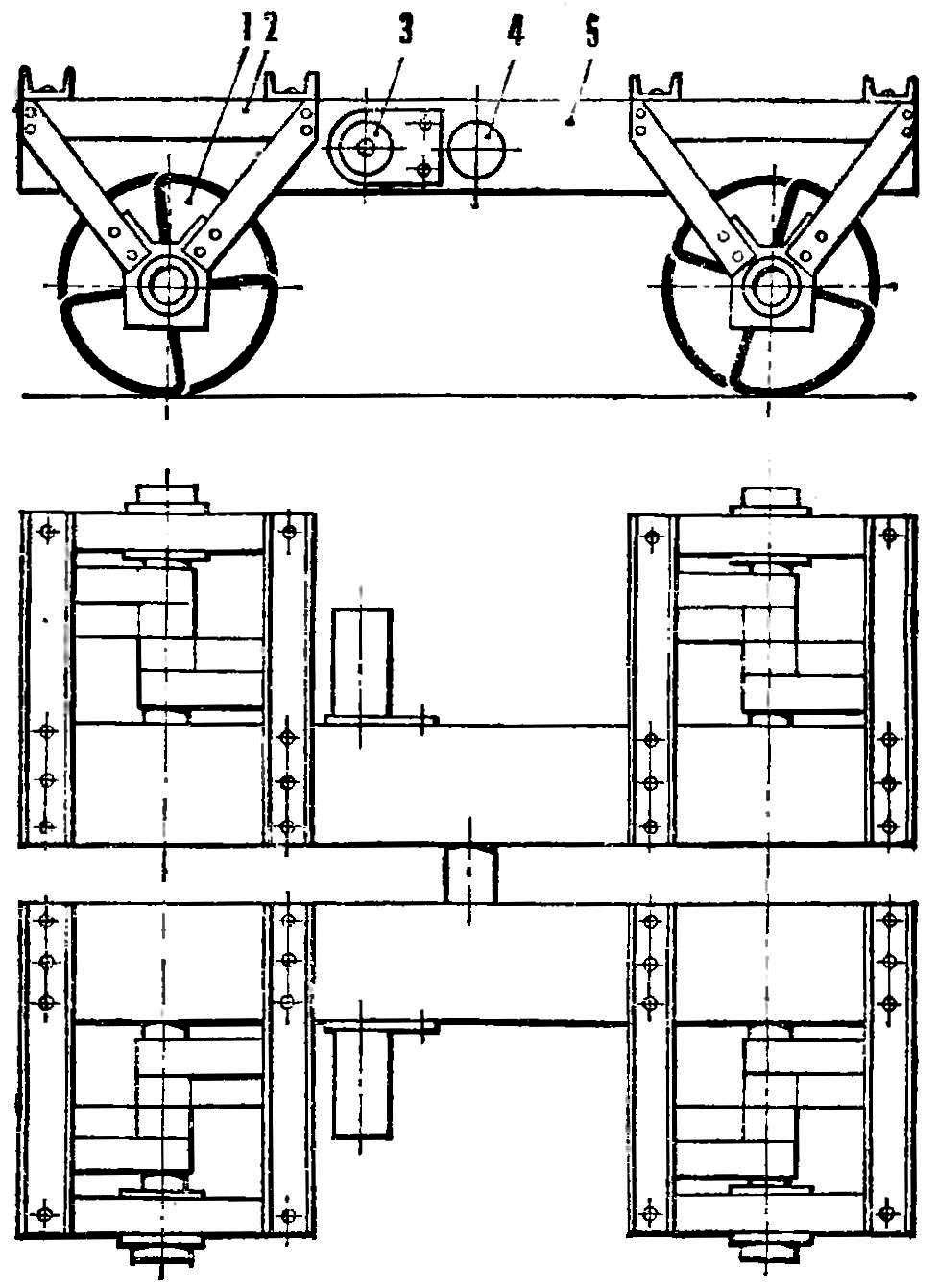
Рис. 5. Транспортная машина с дискретным движителем:
1 — движитель, 2 — рама, 3 — электродвигатель, 4 — шарнир, 5 — корпус.
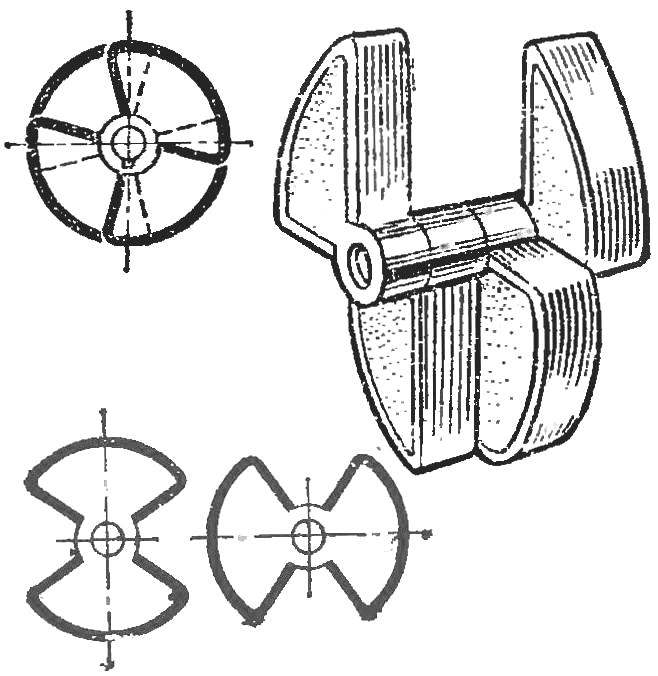
Рис. 6. Варианты дискретного движителя:
А — однолепестковый, Б — двухлепестковый.
Эффект волны получается за счет того, что каждый последующий кривошип смещен относительно предыдущего на определенный угол — в данном случае на 45°. Конструкция волнохода позволяет изменять этот угол для поиска оптимальных параметров волны движителя.
Модель, созданная Д. Романовым, С. Леоновым и А. Игнатушкиным. предназначена для испытаний на грунтах с различной несущей способностью и определения тягово-сцепных характеристик.
ЛЕПЕСТКОВОЕ КОЛЕСО
Наиболее интересный элемент этой модели машины — необычное колесо, названное авторами «дискретным движителем». Оно представляет собой пакет круговых секторов, причем каждый из них сдвинут относительно другого на определенный угол.
Модель представляет собой четырехколесную самодвижущуюся тележку. Еще одна отличительная особенность этого транспортного средства — наличие «сламывающейся» рамы, дающей каждой из двухколесных тележек известную самостоятельность при преодолении неровностей на местности.
В модели предусмотрена возможность установки различных типов колесных движителей. Некоторые из них изображены на рисунке. Авторы этой необычной машины — студенты и сотрудники МВТУ В. Саликов, С. Семенов, П. Луценко и В. Гончаров
И. ЕВСТРАТОВ, инженер
Рекомендуем почитать
 ЧЕТЫРЕ ЖИЗНИ «ГЛОРИИ»
ЧЕТЫРЕ ЖИЗНИ «ГЛОРИИ»
С самого детства я мечтал сделать автомобиль. В то время советская промышленность продолжала в основном выпускать не самые практичные седаны, спроектированные еще в 1960-х годах, да и... БАНАНОВЫЕ ЧИПСЫ
БАНАНОВЫЕ ЧИПСЫ
+ВИДЕО. Многие из нас любят не торопясь полакомится вкусными снеками, например чипсами из овощных бананов. Но всем известна пословица: «Хорошенького понемножку». Главное, как можно...