
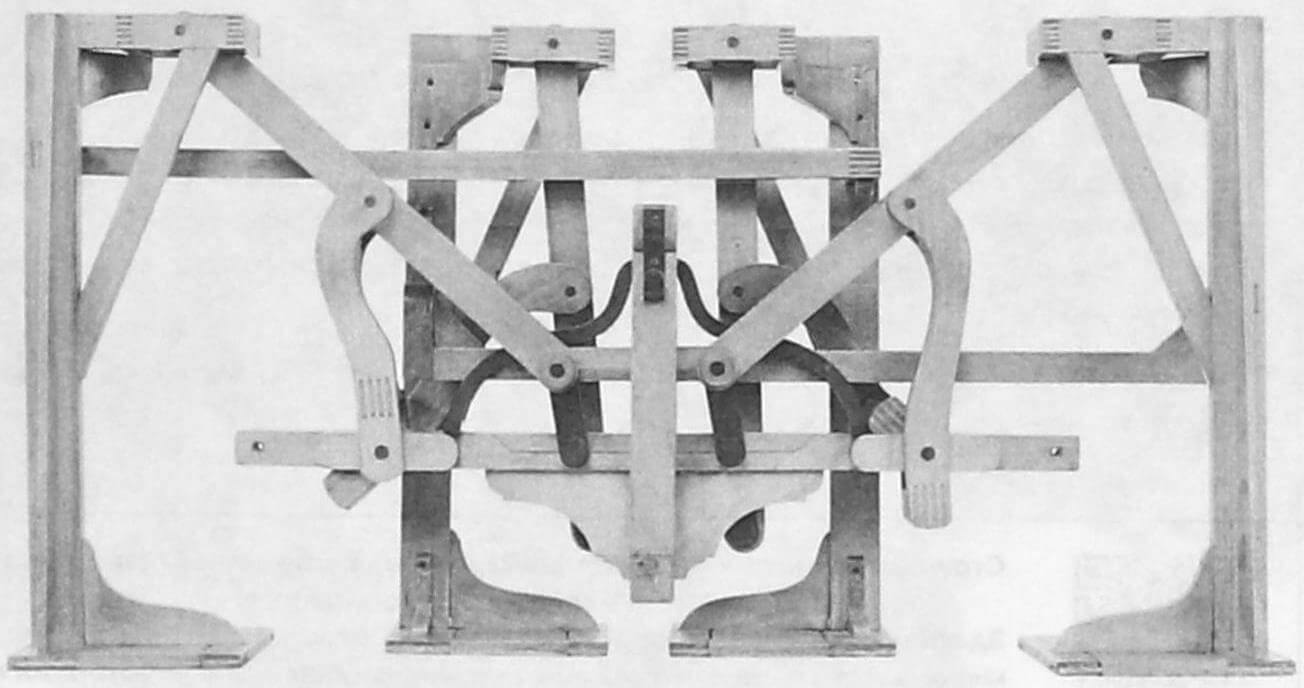
В 1868 году Пафнутий Чебышев придумал плоский четырехзвенный шарнирный механизм, в котором вращательное движение одного звена обеспечивало перемещение некоторой точки другого звена по прямой линии без применения каких-либо направляющих устройств. Усовершенствовав это устройство, через 10 лет на Всемирной выставке в Париже им был продемонстрирован так называемый стопоход -первый в мире шагающий механизм. По сути, в нем четыре четырехзвенника объединены в одну схему, и четыре ноги, перемещаясь попарно и синхронно, обеспечивают движение машины.
В 2020 году Алексея Погодина из Подмосковья увлекли любопытные разработки великого русского математика, да и вообще тема шагающих машин показалась ему интересной. (Кстати, известны образцы, получившие, в отличие от экспериментальных, практическое применение: например, техника для заготовки леса с движителями в виде шарнирных ног-опор.) Встретившись с Алексеем, мы познакомились с его весьма неординарным транспортным средством, которое он сконструировал и воплотил в металле своими руками.
Как именно и почему ему пришла в голову мысль сотворить это чудо, Алексей ответить затрудняется. Наверное, можно было потратить время на что-то более полезное с практический точки зрения, но родилось вот это, и это здорово! Ну был бы еще один вездеход, мотоцикл или самолет — да мало ли что, тут же на свет появилась вещь совершенно уникальная!
Итак, герою нашего рассказа захотелось сделать повозку, приводимую в движение не колесом или гусеницей, а ногами. Впрочем, получился в итоге некий гибрид: сзади — колеса, а спереди -шагающий механизм. Именно он и тянет все устройство вперед. Или назад — в зависимости от того, в какую сторону крутишь педали. Вы уже догадались, наверное, привод тут педальный. В основе конструкции лежит обычный велосипед. Точнее, два велосипеда. Алексей приобрел пару совершенно идентичных детских моделей, взял в руки «болгарку»… Нет, сначала, конечно, была кропотливая работа мысли. Честно говоря, я до сих пор не пойму, как такое можно было придумать! Впрочем, труды упомянутого Чебышева, безусловно, содействовали успеху дела.
Прежде чем приступать к работе с металлом, была сделана небольшая модель шагающего механизма из тонких деревянных реек. Подгоняя их длину, меня точки шарнирного сочленения звеньев, определялась оптимальная траектория движения нижней части опорной рейки — ноги. Когда показалось, что все продумано более-менее верно, настало время попробовать сделать на основе макета натурный образец. С задней частью механизма все достаточно просто. От велосипедов были отпилены передние вилки, в верхней части они соединены поперечной балкой — получилась незамысловатая двухколесная опора, с колеей 800 мм. Затем к поперечине была приварена часть рамы одного из велосипедов с подседельной трубой.
На расстоянии 300 мм от последней приварена рулевая колонка — это узел сочленения двух частей машины: одна поворачивается относительно другой в горизонтальной плоскости, что обеспечивает поворот. Угол складывания небольшой и ограничен специальным рычагом, который, поворачиваясь вместе с передней рамой, упирается своим концом в ограничители на задней балке. Куда занимательнее передняя часть повозки, где, собственно, и смонтировано самое важное, поражающее воображение устройство — шагающий механизм.


Для привода его в действие, как замечено выше, служат педали. Каретка вместе с шатунами и педалями — все от того же велосипеда. Она расположена примерно посередине машины, чтобы, сидя на сиденье над задней осью, было удобно крутить педали. Цепная передача — прямая, то есть в качестве ведомой звездочки использована точно такая же, как и ведущая. Если бы передача была с повышением, то ноги машины шагали бы слишком резво — скорость получилась бы высокой, да и вообще неизвестно, поехала бы повозка. Ведомая звездочка, расположенная выше ведущей, вращается на самодельной оси в подшипниках. Можно было бы использовать обойму велосипедной каретки, выпиленной из его рамы, но Алексей посчитал, что выйдет громоздко. Эта ось служит одновременно и осью кривошипа, четыре (по числу ног) колена которого развернуты относительно друг друга на 90 градусов. Причем два боковых и два центральных колена работают в противофазе (развернуты относительно друг друга на 180 градусов). Длина колена равна 150 мм.

1 — опора коленчатого вала (часть рамы машины); 2 — коленвал привода ног; 3 — неподвижная опора верхнего рычага (часть рамы машины); 4 — верхний качающийся шарнирный рычаг; 5 — нога; 6 — обрезиненный подпятник

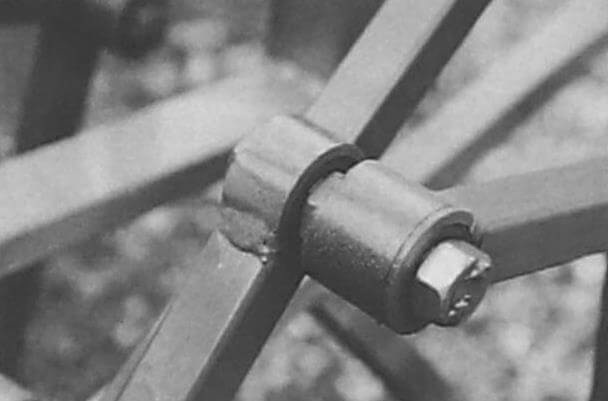
Шатунные шейки (назовем их так, используя автомобильную терминологию) соединяются с продольной частью ноги, в целом представляющей собой треугольник с прямым углом в вершине. Чтобы этот угол не согнулся, приварена диагональ. Все сделано из профиля сечением 20×20 мм В вершине треугольника также находится шарнир, соединяющий ногу с тягой, идущей от верхней опоры шагающего механизма, общей для всех четырех ног. Вертикальный катет треугольника — это и есть опорная часть ноги. Снизу, в точке контакта с опорной поверхностью, приварены башмаки, «подкованные» толстой резиной, чтобы не цокали по асфальту и не проскальзывали. Высота ноги составляет 620 мм, ее продольная часть имеет длину 400 мм, а длина верхней тяги 230 мм. Все шарниры самодельные и представляют собой отрезки трубы с посаженными внутрь подшипниками и осями по внутреннему диаметру подшипника. Вначале Алексей думал использовать трубу с внутренним диаметром 52 мм — как раз под 205-й подшипник. Однако, поразмыслив, решил, что, учитывая количество подшипников, конструкция выйдет неоправданно тяжелой. Взял трубу поменьше — с внутренним диаметром 28 мм, подходящую под 101-е подшипники.

Можно предположить, что внешние обоймы (читай — труба), нарезались «болгаркой» — так поступило бы большинство самодельщиков, пожалуй. Но Алексей использовал для решения задачи труборез — он чуть заминает кромку, и получается хороший упор для внешнего кольца подшипника (по меньшей мере, с одной стороны), ведь иначе он может выскочить из трубы. Оси всех шарниров вращаются в подшипниках во всех звеньях, хотя, разумеется, достаточно было бы поставить подшипник в какой-нибудь одной части шарнира, закрепив ось неподвижно в смежной. Алексей посчитал, что так будет проще, и шарнир, возможно, самоустановится, даже если будет небольшой перекос оси. Но подшипников, конечно, раза в два потребовалось больше.



Соединив все описанное в единый механизм, получилась повозка, и… она поехала! Это, конечно, очень порадовало конструктора. Слегка омрачало восторг то обстоятельство, что рама с шагающим механизмом так «гуляла», что было очевидно — надолго ее не хватит. Тогда сверху из того же профиля 20×20 мм было сделано усиление в виде изогнутой восьмерки. Это что-то вроде диагональных связей, придающих пространственной конструкции жесткость. Выглядят здесь они причудливо, конечно. Но получилось неплохо, а механизм приобрел какой-то футуристический вид.
Для чего четыре ноги, не достаточно ли двух? В принципе достаточно, но четырехногая повозка идет плавней и меньше подпрыгивает Я, само собой, тоже попробовал ее в движении! Ощущения весьма необычные: то ли едешь на велосипеде, ведь педали-то крутишь, то ли катишь в повозке за лошадью. Скорость невелика, и по грунту ехать приятнее, чем по асфальту, но, разумеется, опора должна быть достаточно твердой, иначе ноги машины зароются в грунт.
Вопрос, который наверняка вертится на языке у многих: «А для чего, собственно, нужен такой транспорт?». Хотя, строго говоря, — это и не транспорт вовсе, далеко на нем не поедешь. Да и не нужно, поскольку это исключительно средство для развлечения, гарантированно поднимающее настроение при его использовании. И конечно, было увлекательно его сделать своими руками! Машинка строилась для детей, но катаются на ней больше взрослые И равнодушных среди них после выезда нет! Надо бы только сиденье пошире поставить. Но это не проблема, главное, «вело-конь» удался — он бегает! И если вдруг навстречу попадается случайный прохожий, то он неизменно сворачивает шею от изумления, а поняв, что к чему, расплывается в широкой улыбке.
Андрей ФАРОБИН
Рекомендуем почитать
 СКОРОСТНАЯ ПОЛУTOPAKУБOBKA
СКОРОСТНАЯ ПОЛУTOPAKУБOBKA
Чем меньше кубатура двигателя автомодели, тем более жесткие требования предъявляются к ее конструкции, изготовлению, сборке. Скоростная, кордовая 1,5 см3, которую мы предлагаем,... ШКАФ С ВОДЯНЫМ ОХЛАЖДЕНИЕМ
ШКАФ С ВОДЯНЫМ ОХЛАЖДЕНИЕМ
Июльская жара способна буквально за день загубить собранные вами плоды и ягоды. Чтобы этого не произошло, оборудуйте на приусадебном участие хранилище, в мотором можно было бы поддерживать...