Системы управления моделями характеризуются множеством параметров. В некоторых обстоятельствах наиболее важными становятся дальность и помехоустойчивость. Их можно довести до абсолюта, если не принимать никаких созданных человеком сигналов. Ведь во многих случаях достаточно, чтобы модель могла сама ориентироваться по магнитному полю Земли. Для этого мною был создан модуль магнитного стабилизатора курса.
Идея была простой: никаких магнитных стрелок и прочей подобной механики с ее колебаниями и чувствительностью к механическим воздействиям. Система должна быть электронной на основе датчиков Холла. Из числа доступных аналоговых датчиков был выбран SS495A с чувствительностью около 3 мВ/Гс. Но поскольку магнитное поле Земли как раз и составляет около 1 Гс, то картина получалась не особо оптимистической. При небольших отклонениях от курса полезный сигнал оказывался сравнимым с дрейфом нуля популярных операционных усилителей (ОУ). В то же время оставалась еще надежда на использование прецизионных ОУ. Однако тема эта совершенно неисследованная: многим ли радиолюбителям приходилось разбираться с единицами магнитной индукции или напряженности магнитного поля? Тут вполне были возможны ошибки в оценке величин на несколько порядков. Словом, требовались практические исследования!
Результаты экспериментов оказались полностью соответствующими предположениям эффект заметный, но «тонущий» в нестабильностях. Хотел начать разбираться с возможностями прецизионных ОУ, но неожиданно нашел способ получить требуемые характеристики на обычных! Решил использовать два датчика Холла, подключенные один к прямому, другой — к инвертирующему входу усилителя. Инверсия сигналов с датчиков обеспечивалась их поворотом относительно друг друга на 180 градусов. В итоге полезный сигнал удваивался, а связанные с температурой и напряжением питания нестабильности в значительной степени компенсировались. Полученные на макете результаты уже позволяли говорить о практической пригодности данной схемы.
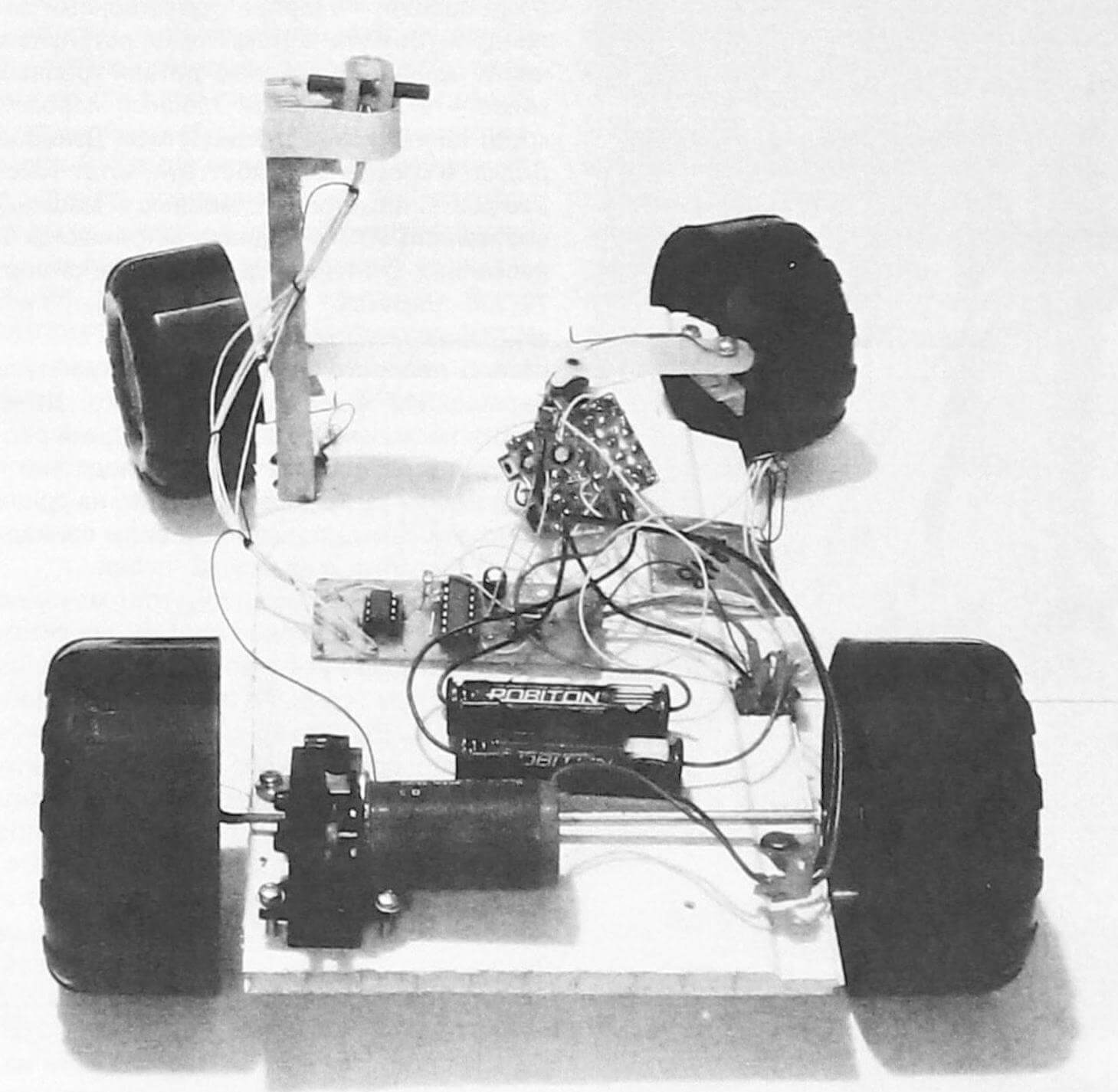
Однако собранная уже на печатных платах аппаратура закапризничала. Стало ясно, что нужно придумать еще какой-то способ усилить полезный сигнал. Вот тут-то мне и пришла в голову мысль дополнительно усилить магнитное поле с помощью ферритовых магнитопроводов. Эффект от них был неплох, и аппаратура была установлена на экспериментальную «колымагу» -автомоделью ее назвать сложно. Скажем так, — это пока «самодвижущийся стенд».
Работа полностью собранной системы поначалу не порадовала: рулевые машинки начинали исправлять курс только при отклонениях от него в несколько десятков градусов. Тем не менее, рабочие испытания комплекса провести было необходимо. Вынес модель на ближайшую спортивную площадку и моему удивлению не был предела. Неуклюжий агрегат пошел по курсу «как по ниточке»!
Следующие две недели я разбирался со странным и нестабильным поведением аппаратуры, пока, наконец-то, не установил причину. Оказывается, в железобетонных многоэтажках с их арматурой и стальными трубами водопровода/отопления естественное магнитное поле Земли во многом ослаблено и искажено. Достаточно вынести аппаратуру из комнаты на балкон, и она начинает работать вполне удовлетворительно.
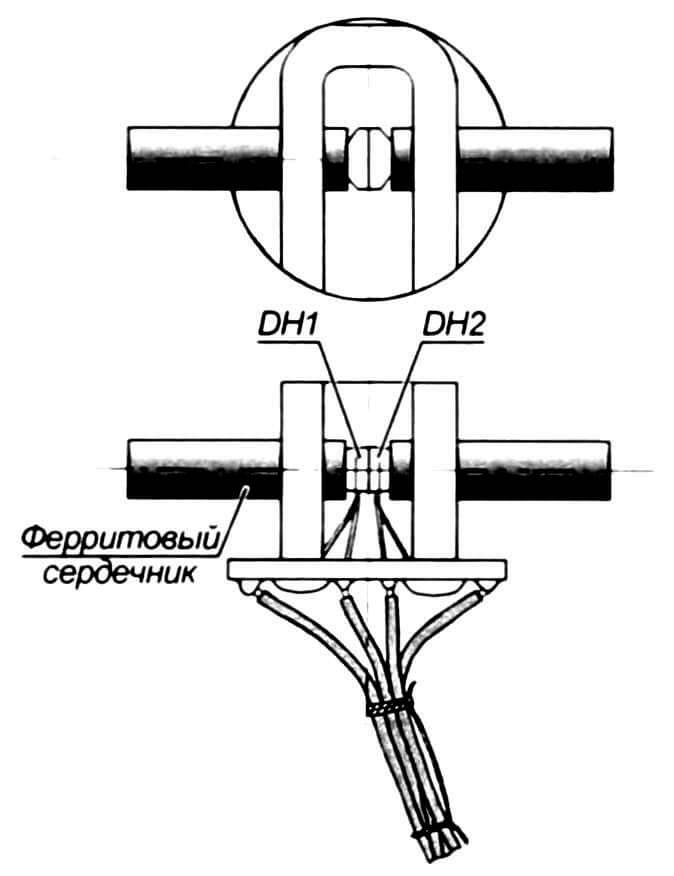
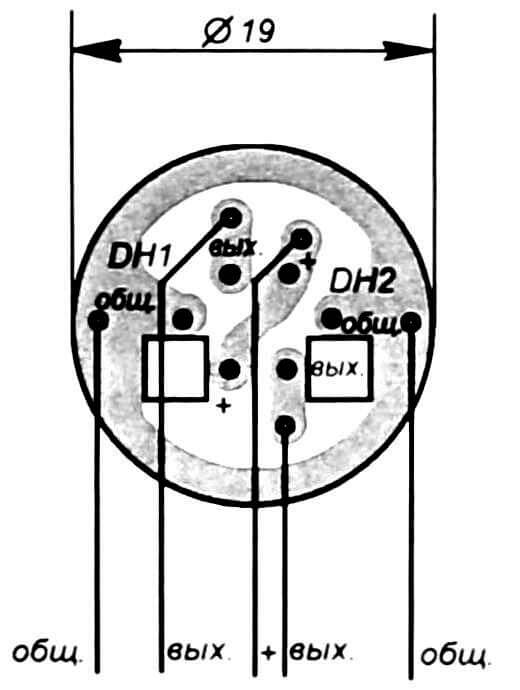
Итак, подробнее о конструкции. Датчик содержит два прибора на эффекте Холла, установленных на круглой плате диаметром 19 мм. Датчики прижаты друг к другу таким образом, что смотрят в противоположные стороны. Снизу к плате припаян жгут из пяти тонких проводов МГТФ — они гибкие, надежные и не содержат магнитных составляющих. Проводников общего провода два, припаянных к противоположным сторонам платы. Это улучшает защиту от наводок и надежность. Провода длиной 18 см, увязаны навощенной нитью в плотный жгут. Сверху платы устанавливается обойма для ферритовых сердечников. Она выточена из дерева и зафиксирована на плате клеем и выступами, входящими в соответствующие отверстия. Если обойма из пластмассы, то выступы можно расплющить с обратной стороны платы нагретым паяльником. Но перед фиксацией нужно разметить и сделать отверстия под сердечники напротив корпусов датчиков.
Сердечники и датчики склеиваются в плотный пакет, не допуская лишних воздушных зазоров, ослабляющих магнитное поле. Минимальная длина сердечников — 15 мм, сечение — 3×4 или диаметр 4 мм. Предпочтительнее марганец-цинковые ферриты марок М3000НМ или М2000НМ. Они намного лучше, чем никель-цинковые марок 600НН или 400НН. Высокая магнитная проницаемость обеспечивает значительное усиление магнитного поля, к тому же, эти ферриты легче перемагничиваются, благодаря чему аппаратура будет чувствительнее, реагируя на меньшие отклонения от курса. Даже повышенные потери на высоких частотах, ослабляющие переменные магнитные поля, здесь в самый раз. Если условия размещения датчика на модели позволяют, то следует применять более длинные сердечники. Это увеличит пространственное разрешение аппаратуры.
Датчик помещается на модели в вертикальный стакан диаметром примерно 20 мм, в котором он должен плотно на трении прокручиваться рукой. На расстоянии около 100 мм от датчика не должно быть никаких других ферромагнитных масс, электромоторов, магнитов и тп.
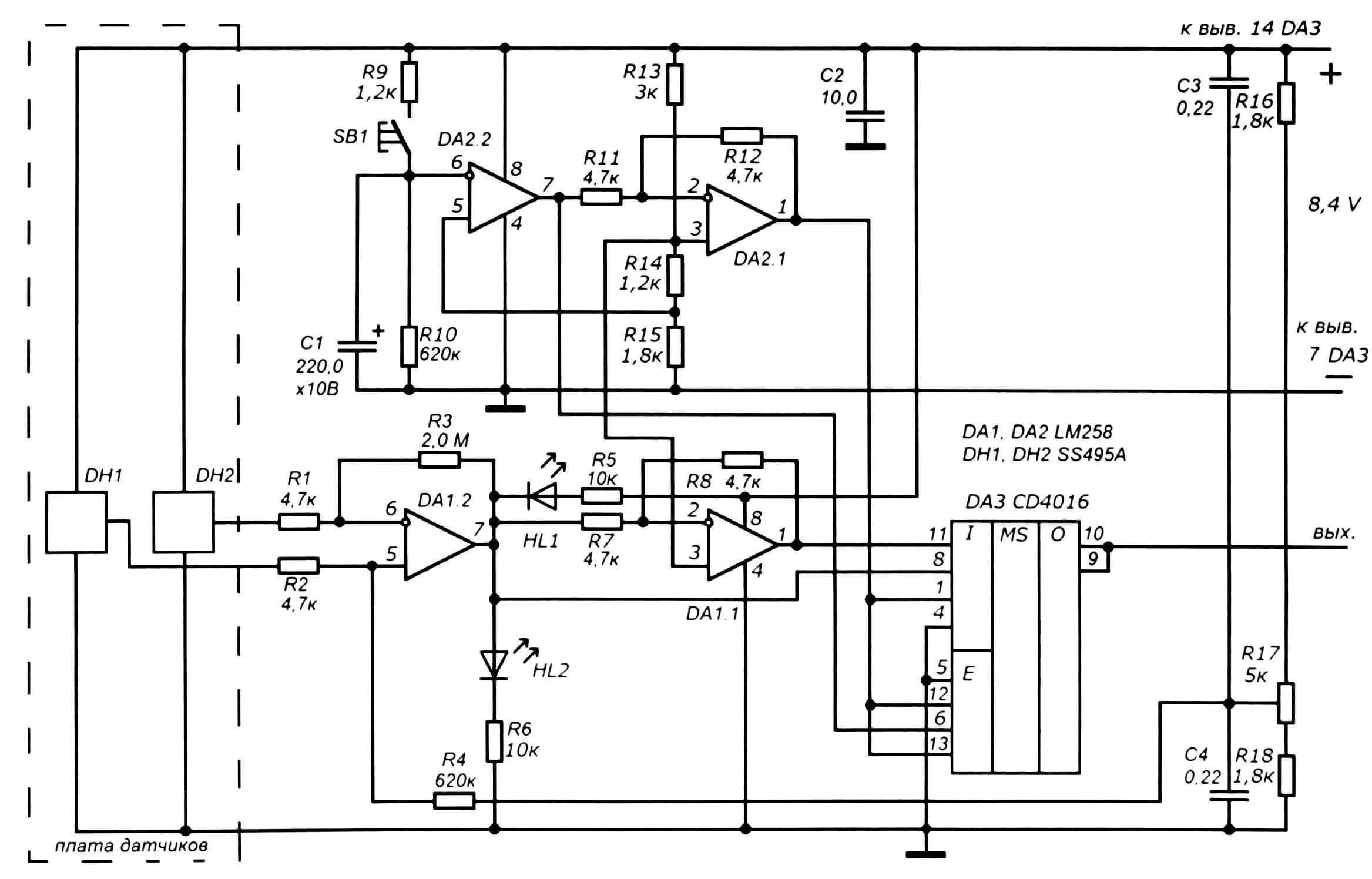
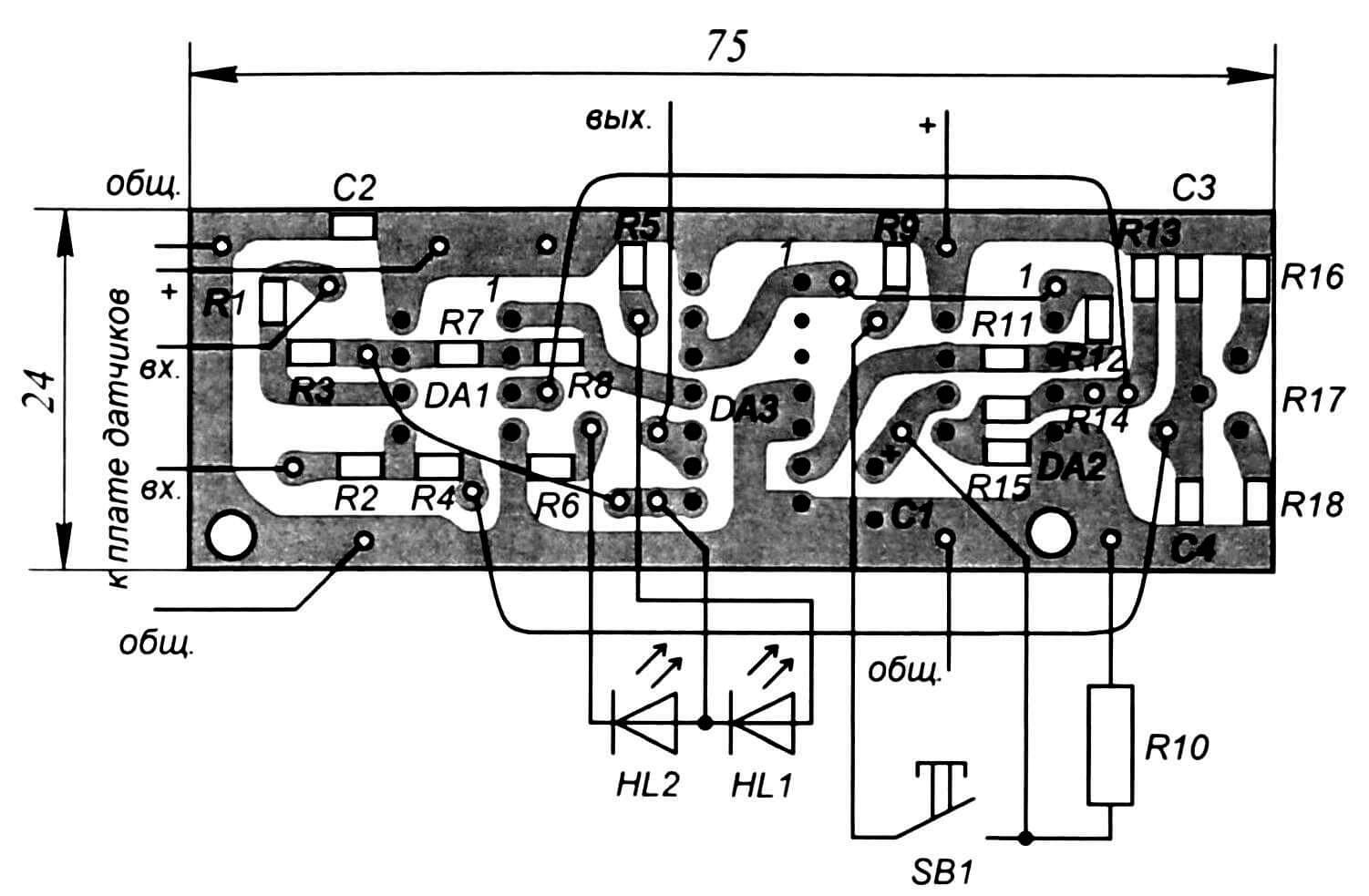
Перейдем к основной плате прибора. Сигналы от датчиков Холла заводятся на ОУ DA12. На один из входов также подается напряжение балансировки с подстроечного резистора R17. Практика показала, что этот резистор должен быть размещен подальше от входного ОУ, так как наводки от подносимой к нему руки или отвертки сбивают режим чувствительного усилителя. Балансировка проверяется по светодиодам.
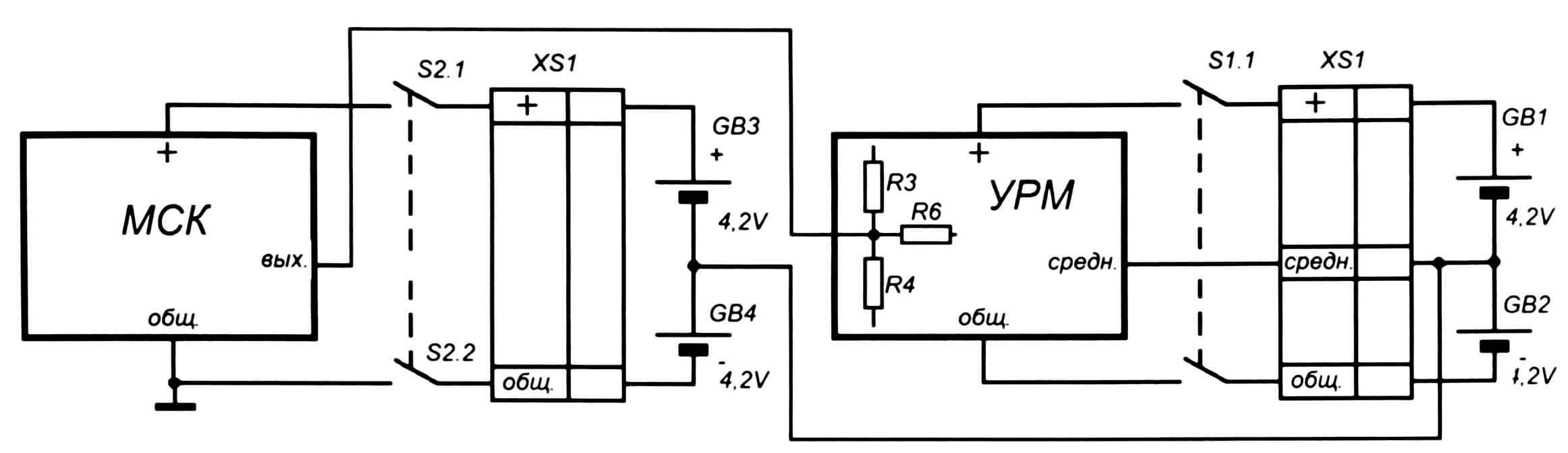
В конечном итоге сигнал с ОУ идет на плату модуля УРМ от системы радиоуправления «Каната» (см «М-К» №1,2, 9-2019). Алгоритм пользования магнитным стабилизатором курса следующий. Устанавливаем модель в выбранном направлении движения (по курсу). Вращением датчика ориентируем магнитопровод по линии «восток-запад», достигая отсутствия магнитного поля в магнитопроводе. Вращением подстроечного резистора R17 добиваемся, чтобы светились оба светодиода. Это соответствует выходному напряжению. близкому к середине напряжения питания и среднему положению руля. Если модель отклонится от курса, то в магнитопроводе датчика появится магнитное поле, причем его направление будет зависеть от того, в какую сторону отклонилась модель. Соответственно сместится и управляющее напряжение на входе модуля УРМ. Понятно, что перемещение рулей при смещении модели должно способствовать возвращению ее на курс, а не уходу с него. В противном случае следует развернуть датчик на 180 градусов.
Как видите, в минимальной конфигурации аппаратура весьма проста. Однако нам необходимо, как правило, чтобы модель не только двигалась по заданному курсу, но еще и вернулась по нему обратно. Для этого предназначены остальные узлы системы. Благодаря усилителю DA11 мы имеем не только прямой, но и инверсный сигнал стабилизатора курса А на DA2 собран простой таймер. Запускается он кратковременным нажатием на кнопку SB1. При этом на выходе DA2 устанавливается низкий уровень, а когда С1 разрядится — высокий. Второй усилитель микросхемы DA2 инвертирует этот сигнал. Прямой и инверсный сигналы таймера идут на управляющие входы коммутатора DA3. Таким образом, в зависимости от состояния таймера на вход платы УРМ пойдет прямой или инверсный сигнал с датчика. До срабатывания таймера система будет стабилизировать модель на прямом курсе, а после срабатывания — на обратном, измененном на 180 градусов.
Время прямого курса при указанных на схеме номиналах составляет около 1 минуты. В зависимости от условий применения устройства, можно использовать либо одно фиксированное время, либо несколько, задавая их с помощью переключателя. Либо установить небольшой переменный резистор со шкалой, чтобы установить любое требуемое время. Делитель R13-R15 обеспечивает модуль необходимым набором опорных напряжений. Неиспользуемые входы коммутатора во избежание их пробоя статическими зарядами заземлены или соединены с другими выводами микросхемы.
Правила использования полного варианта стабилизатора аналогичны, за исключением того, что при использовании режима с возвратом перед настройкой необходимо нажать кнопку, а затем нажать ее еще раз перед запуском модели. Если кнопку не нажимать, то стабилизатор будет вести модель «в один конец».
Как уже сказано, в стабилизаторе курса применен модуль от описанных в журнале систем радиоуправления семейства «Каната». Может использоваться как старая модификация на обычных деталях, так и новый модуль УРМ-4 на SMD-компонентах. Сигнал с платы стабилизатора курса подается на точку формирования управляющего напряжения, то есть на точку соединения R3, R4, R6 В модуле, предназначенном для использования в магнитном стабилизаторе, транзисторы VT1 или VT2 и входные детекторы можно не устанавливать
Светодиоды должны быть с достаточно высоким напряжением зажигания. То есть, белого и синего свечения. Все резисторы и конденсаторы, кроме С1. R10 и R17 — SMD типоразмера 1206.
Не исключено также использование данного модуля в составе упомянутых систем радиоуправления. К примеру, он может отвечать за курс модели, а управление скоростью и включение каких-либо исполнительных устройств будет по-прежнему осуществляться по радио.
Поскольку курсовой модуль имеет дело не с переменными, а с практически постоянными уровнями сигнала, то защита от помех с помощью RC фильтров здесь почти не поможет. Поэтому плата модуля запитывается от собственного источника — пары Li-ion или Li-Pol аккумуляторов с небольшим сдвоенным выключателем, которые сильно не обременят модель своим весом и габаритами. Если же у вас в модели, как в планерах, парусниках, конструкциях с ДВС или паровыми двигателями, кроме данной системы нет никаких других силовых электроприводов, то допустимо питание от одной пары аккумуляторов емкостью не менее 0,5 А ч.
Александр ЛИСОВ, г, Иваново
Рекомендуем почитать
 АВТОМОБИЛЬ АМО Ф-15
АВТОМОБИЛЬ АМО Ф-15
АВТОМОБИЛЬ АМО Ф-15. Масштаб модели 1:25. Автомобиль АМО-Ф 15 (1924-1931) являлся развитием итальянского грузовика FIAT-151ter. Первые десять автомобилей были собраны с 1 по 6... МОТОКУЛЬТИВАТОР ПЛЮС
МОТОКУЛЬТИВАТОР ПЛЮС
Конечно же, у большинства мужчин, имеющих приусадебное хозяйство или садово-огородный участок, есть мотоблок или мотокультиватор, причём ещё советского образца — типа...