
 Прошли те времена, когда главным достоинством кордовой модели-копии считалось максимальное сходство с прототипом. Теперь требуется, чтобы она и летала как настоящий самолет. Модель приходится оснащать сложной механизацией, аналогичной той, что используется в большой авиации.
Прошли те времена, когда главным достоинством кордовой модели-копии считалось максимальное сходство с прототипом. Теперь требуется, чтобы она и летала как настоящий самолет. Модель приходится оснащать сложной механизацией, аналогичной той, что используется в большой авиации.
Сделать оборудование не так уж сложно. Но вот как управлять им в полете? Сейчас в основном используются два способа управления: механический, с помощью дополнительных корд, и электрический. Каждый имеет определенные преимущества и недостатки. Но здесь мы хотим поговорить о втором способе, электрическом. Суть его заключается в том, что все механизмы модели приводятся в действие моторами, которые питаются и управляются с земли: пульт управления и источник питания находятся у «пилота».
Для примера рассмотрим управление моделью-копией самолета ИЛ-28. Производятся следующие операции: уборка и выпуск шасси и посадочных щитков, открытие и закрытие бомболюка, регулирование оборотов двигателя. Кроме того, нужно обеспечить торможение колес и выключение двигателей. Для этого ручку управления кордами моделист отклоняет полностью от себя.
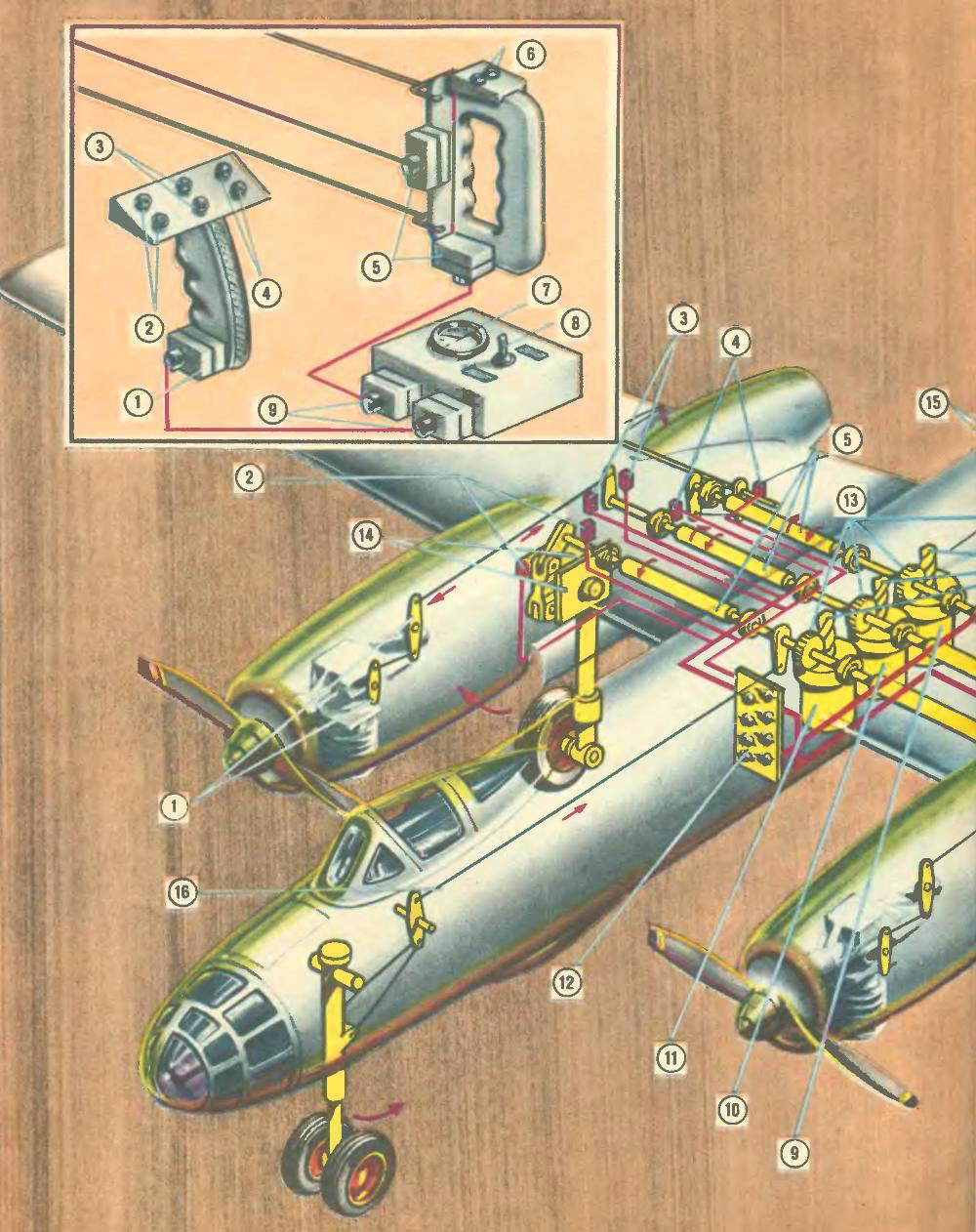
Оборудование модели:
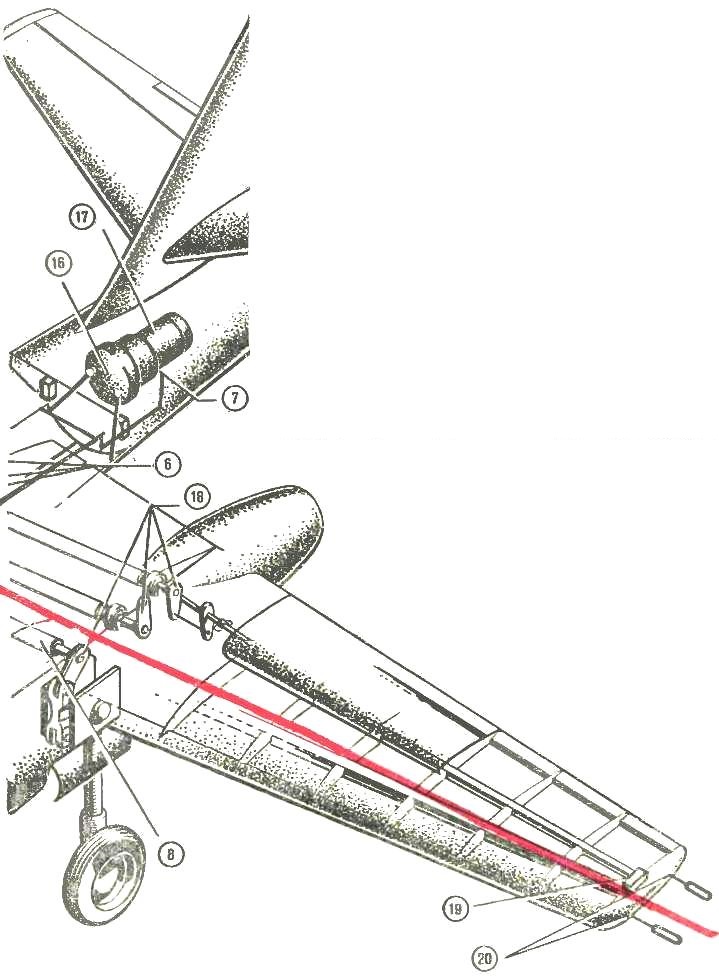
1 — заслонки; 2 — концевые выключатели шасси; 3 — концевые выключатели оборотов двигателя; 4 — концевые выключатели щитков; 5 — дюралюминиевые трубки; 6 — червяки; 7 — редуктор; 8 — трубки; 9 — мотор щитков; 10 — мотор оборотов двигателя; 11 — мотор шасси; 12 — диоды; 13 — шестерни; 14 — крепление шасси; 15 — концевые выключатели бомболюка; 16 — механизм бомболюка; 17 — мотор бомболюка; 18 — качалки; 19 — разъем подключения питания; 20 — корды.
Ручки управления (в рамке):
1 — разъем; 2 — кнопки шасси; 3 — кнопки щитков; 4 — кнопки бомболюка; 5 — разъемы; 6 — кнопки управления оборотами двигателей; 7 — вольтметр; 8 — выключатель.
В принципе для выполнения первых четырех операций нам потребуется передать восемь команд. Но, используя реле, концевые выключатели и диоды, мы сможем обойтись для их передачи всего пятью проводами. Иными словами, на каждую операцию, состоящую из двух команд, вам потребуется один провод плюс один провод, общий для всех. В этом состоит достоинство схемы.
Разберем, как работает электрическая схема управления (рис. 1). Предположим, шасси выпущены, концевой выключатель КВ2 нажат, и его контакты 1—2 разомкнуты. Схема подготовлена к уборке шасси. При нажатии на кнопку уборки шасси КН2 ее контакты 2—3 замыкаются. Ток идет по цепи + 24 в — обмотка реле Р2 — контакты 4—5 реле Р11—24 в. Реле Р2 срабатывает, замыкает контакты 8—9 и 11 —12. Через контакты 8—9 и диод Д2 напряжение попадает на обмотку электродвигателя уборки шасси М1, контакты 1—2 КВ1, контакты 11—12 Р2. Цепь замкнута — электродвигатель приводит в движение механизм уборки шасси.
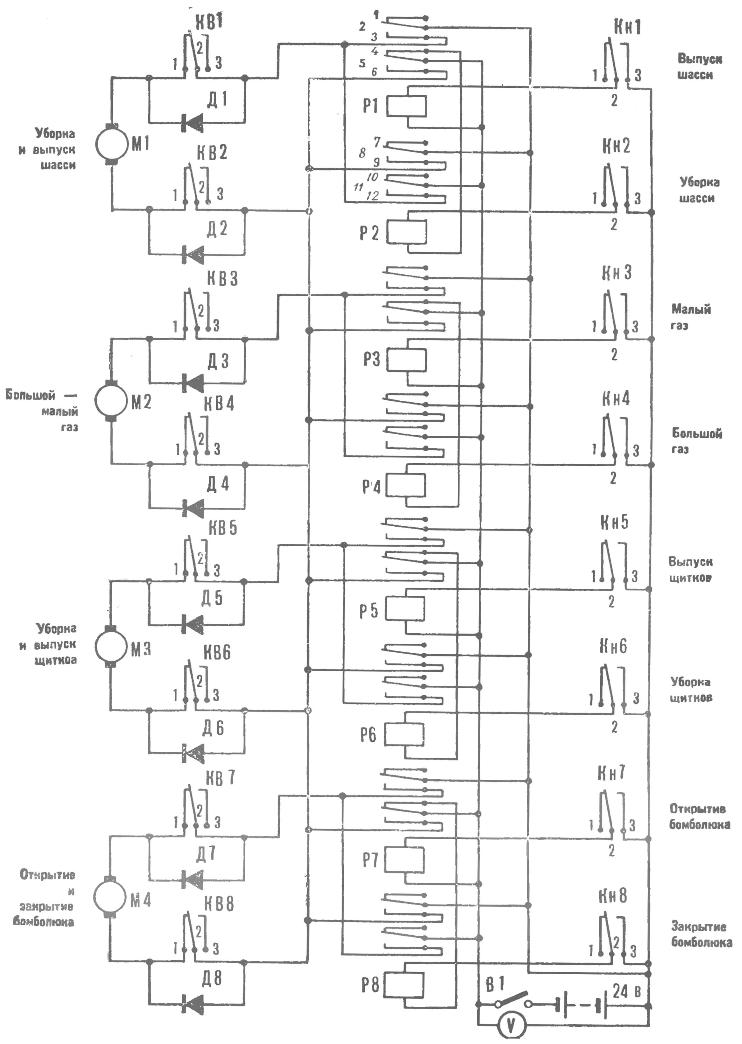
Рис. 1. Электрическая схема управления моделью
Дойдя до верхнего положения, стойка шасси нажмет концевой выключатель КВ1, его контакты отключат электродвигатель от питания.
Для выпуска шасси нажимают кнопку выпуска КН1. По ее контактам 2—3 напряжение поступает на обмотку реле Р1. Оно срабатывает и замыкает контакты 2—3 и 5—6. Напряжение +24 в через контакты 2—3 Р1 и Диод Д1 (контакты 1—2 КВ1 разомкнуты) попадает на обмотку электродвигателя и далее через контакты 1—2 КВ2, 5—6 Р1 — на «минус» источника тока. Электродвигатель выпускает шасси. При полном выпуске шасси срабатывает КВ2, его контакты 1—2 размыкаются, и двигатель останавливается.
Остальные цепи работают аналогично при нажиме иа соответствующие кнопки.
Возникает вопрос: какую роль выполняют диоды, можно ли их исключить из схемы? Оказывается, нет. Например, попробуем вместо диода Д2 поставить перемычку и включим «выпуск шасси». Контакты 1—2 КВ2 разомкнутся, а цепь все равно не разрывается — ток идет через перемычку. Мотор продолжит работу, пройдя ограничитель КВ2. Так недолго и поломать шасси. Диод, который имеет свойство проводить ток только в одном направлении, в другом его не пропустит, что нам и нужно. Блокируя концевые выключатели, диоды тем самым подготавливают цепи механизмов для обратной эволюции.
На модели установлены четыре мотора типа ДП-1 на напряжение 24 в, то есть на каждый механизм свой мотор. Концевые выключатели — тина МП-10, диоды — тина Д7.
Кнопки Кн1—Кн8 (типа МТ-1) расположены на двух ручках (см. вкладку). Питание и блок реле (8 реле типа РЭС-6, паспорт РФО 452.103) заключены в специальную коробку, которую моделист носит на плече или надевает на пояс. С источником питания и ручками управления модель связана пятью тонкими медными многожильными изолированными проводами. Они заплетаются в жгут.
Для питания достаточно шести батарей КБС-0,5 общим напряжением 24 в.
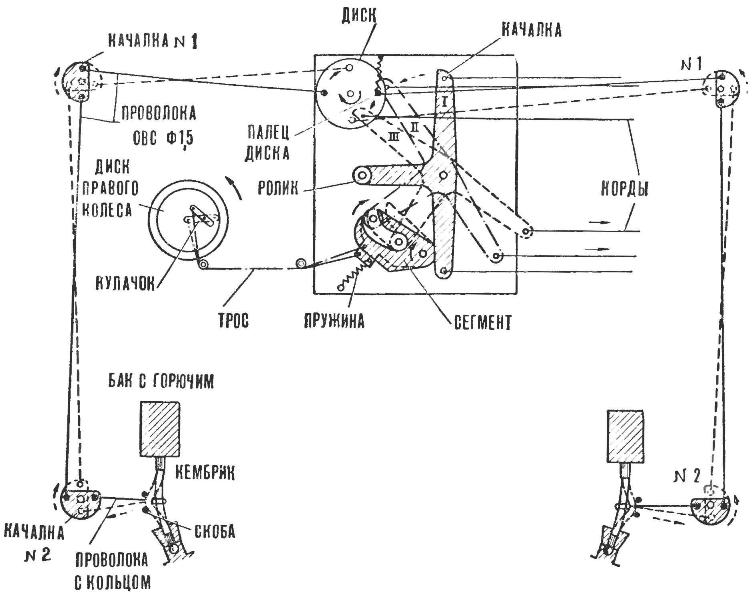
Рис. 2. Система управления тормозом и выключением двигателей.
Система управления тормозом колеса и выключателя двигателей показана на рисунке 2 В положении I качалка свободно отклоняется вперед и назад, корды передают усилие на рули модели. Если ручку управления отклонить от себя, ролик качалки входе в прорезь сегмента (положение II). Трос, натягиваясь, проворачивает кулачок, который начинает тормозить колесо. При наибольшем отклонении ручки управления (положение III) ролик скользит в прорези сегмента — торможение продолжается. В то же время верхний конец качалки нажимает на палец диска. Диск вращается, тянет за собой качалки № 1 и № 2. Проволока с кольцом на конце пережимает кембрик, доступ горючею в двигатели прекращается.
Двигатели ИЛа имеют рабочий объем 5,6 см3. Мощности их при весе модели 2 кг 850 г вполне достаточно для преодоления сопротивления двух корд и жгута. При этом самолет развивает скорость 80—85 км/ч.
А. МАЛИНОВСНИЙ, Калининградская областная СЮТ
Рекомендуем почитать
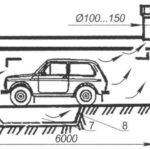 ВЕНТИЛЯЦИЯ В ГАРАЖЕ
ВЕНТИЛЯЦИЯ В ГАРАЖЕ
Вокруг гаража я сделал отмостку и водоотводную канаву. Вдоль всех стен, кроме фасада, посадил низкорослые кустарники и деревья, чтобы они не препятствовали обдуву крыши ветром и, конечно... КУБОК «АЛЕКСА» — В СИБИРИ
КУБОК «АЛЕКСА» — В СИБИРИ
Сегодня эти соревнования ракетомоделистов - одни из лучших в России. Небольшой город Урай в Тюменской области многие спортсмены называют "меккой" "ракетчиков" Сибири. И, полагаю, не зря. В...