 В последнее время в авиационном моделизме все шире используются электродвигатели. Это и понятно, их преимущество в сравнении с двигателями внутреннего сгорания очевидно: простота запуска, точность регулирования скорости вращения винта, отсутствие выхлопных газов, низкий уровень шума.
В последнее время в авиационном моделизме все шире используются электродвигатели. Это и понятно, их преимущество в сравнении с двигателями внутреннего сгорания очевидно: простота запуска, точность регулирования скорости вращения винта, отсутствие выхлопных газов, низкий уровень шума.
Сейчас уже создано несколько интересных моделей самолетов с электромоторами. Делаются первые попытки применить их и на моделях вертолетов.
В статье В. Слепкова из Ленинграда рассматривается возможность изготовления модели, в которой электроэнергия подается по проводам.
Выбор двигателя и расчет тяги
Возможность создания электровертолета (рис. 1) прежде всего определяется удельной мощностью мотора. Из легких и доступных двигателей можно выделить серию электромоторов от пылесосов, которые при сравнительно малом весе развивают большую мощность. Самый маленький из них используется в электрощетке «Ветерок». Его вес всего 430 г, а мощность при кратковременном использовании может достигать 75 Вт, то есть около 0,1 л. с. Такие же характеристики и у популярного двигателя внутреннего сгорания МК-17, правда, при втрое меньшем весе.
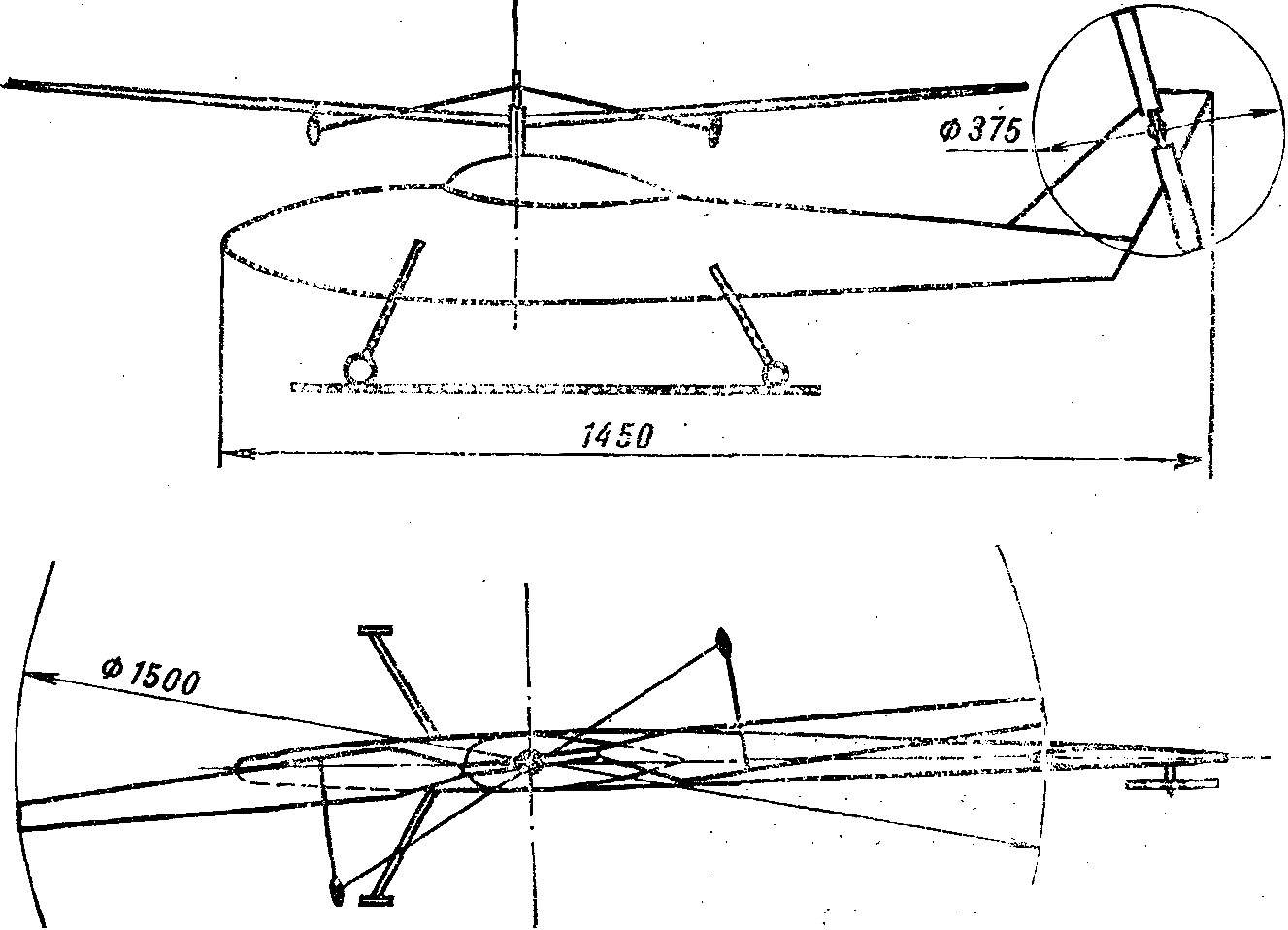
Рис. 1. Чертеж модели электровертолета.
При испытании «Ветерка» с серийным авиамодельным винтом Ø 200 мм и шагом 100 мм (рис. 2) он развил тягу около 500 г, достаточную для полета летательного аппарата весом до 5 кг. Но для модели вертолета требуется большая энерговооруженность.
В соответствии с формулой Н. Е. Жуковского тяга несущего винта на режиме висения составляет:
T = (33,25*NвDη0)2/3,
здесь: T — тяга, кг;
Nв — мощность, л. с.;
D — диаметр, м;
η — относительный КПД несущего винта при работе на месте.
Величина η0 для лучших авиамодельных несущих винтов достигает 0,65—0,7. На вращение рулевою винта, вентилятора и на потери в редукторе также тратится мощность электродвигателя. Будем считать, что доля ее, передаваемая несущему винту, составит 0,07 л. с. Выбирая его диаметр равным 1,5 м, определяем тягу:
T= (33,25*0,07*1,5*0,65)2/3 = 1,73 кг.
Таким образом, для модели вертолета весом 1,5 кг запас тяги позволит проводить полет не на «максимуме» двигателя. Здесь надо учесть еще и то, что при горизонтальном полете потребная мощность меньше, чем на режиме висения. К тому же при взлете будет положительно сказываться эффект близости земли. Все это говорит о том, что электродвигатель не придется эксплуатировать на максимальных оборотах.
Выбор схемы модели
В настоящее время в авиации основная часть вертолетов выполнена по одновинтовой схеме с хвостовым винтом, получившей широкое распространение благодаря простоте управления. Учитывая, что создаваемая модель будет управляемой, лучше всего взять за основу именно такую схему. Возможный вариант чертежа представлен на рисунке 2.
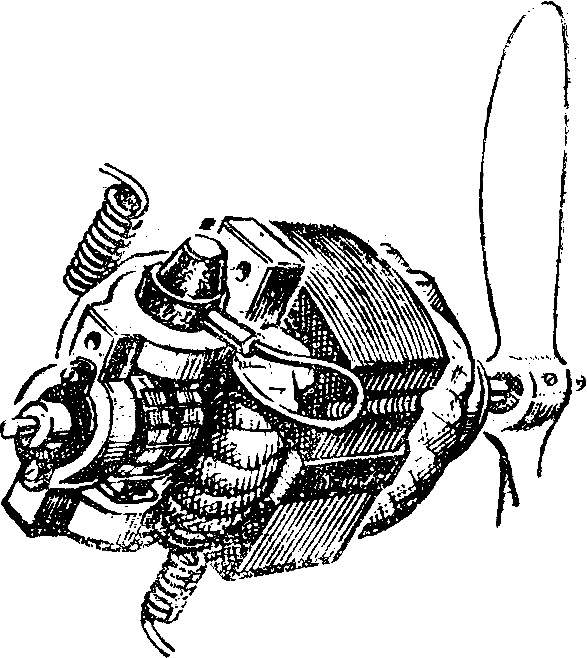
Рис. 2. Силовой электродвигатель «Ветерок».
Для простоты изготовления и балансировки несущий и хвостовой винты выполнены двухлопастными. При создании любого вертолета серьезное внимание следует уделять устойчивости. В проектируемой модели она обеспечивается с помощью стабилизирующих грузов, образующих своеобразный гироскоп. При работе ротора грузы, установленные на лопастях, стремятся сохранить плоскость вращения. При отклонении ее от заданного положения происходит циклическое изменение углов атаки лопастей, благодаря этому возникают аэродинамические силы, возвращающие ротор в прежнее положение. Меняя плоскость вращения грузов с помощью автомата перекоса, можно управлять полетом модели.
Главный редуктор и передача вращения на рулевой винт
Чтобы несущий винт развил тягу, подсчитанную ранее, необходимо правильно выбрать передаточное число редуктора. Точный расчет предполагает знание нагрузочной характеристики двигателя и аэродинамической несущего винта. Можно ограничиться и ориентировочным расчетом. Зная диаметр пиита, установленного при испытаниях на валу электродвигателя, и ротора, можно определить передаточное число редуктора по формуле:
iр = (Rнв/R0)5/3,
где Rнв — радиус несущего винта;
R0 — исходный радиус винта на валу электродвигателя;
iр — передаточное число редуктора;
Для Rнв = 0,75 м; R0 = 0,1; iр = 28,8.
Такое передаточное число можно посчитать, используя две-три ступени. Если выбирается двухступенчатый редуктор, то:
і1 = Z1/Z2; i2 = Z3/Z4,
где Z — число зубьев шестерен редуктора. Взяв Z1 = 10, Z2 = 100, Z3 = 17, Z4 = 93, получим iр = 28,8. Если на практике не удастся подобрать шестерни с заданным числом зубьев и возникает отклонение на +/-10% от расчетного значения, это не приведет к существенному уменьшению тяги несущего винта.
Следует стремиться выполнить редуктор легким и в то же время достаточно прочным. Для уменьшения веса большие шестерни (Z2 = 100 и Z4 = 93) можно изготовить из дюралюминия или текстолита.
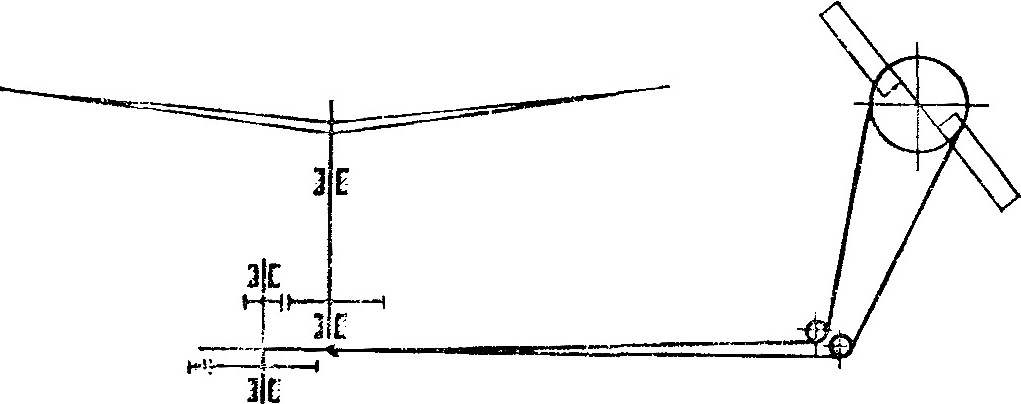
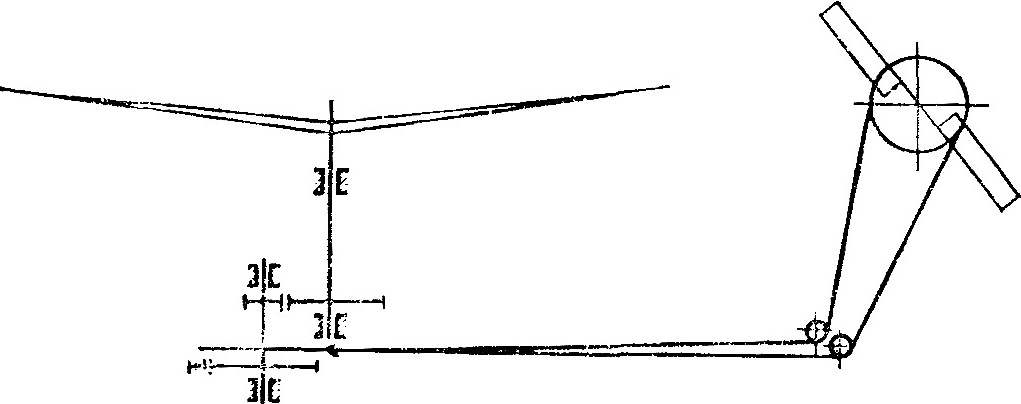
Трансмиссию (рис. 3) к рулевому винту проще всего сделать с помощью двух шкивов Ø 60—80 мм: ведущий устанавливается на промежуточной ступени редуктора, ведомый — на хвостовой балке. Связывает их лента из капроновой нити Ø 0,8—1 мм.
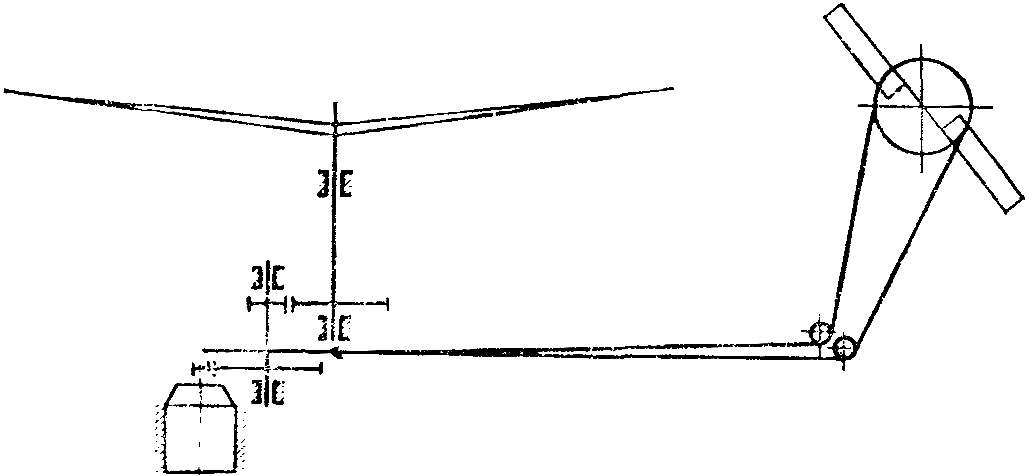
Рис. 3. Схема трансмиссии модели.
Управление моделью
При управлении моделью на первом этапе достаточно двух команд: изменения оборотов двигателя и управления по курсу. Первое делается достаточно просто — с помощью включенного в цепь питания реостата, например, от педали швейной машины.
Для управления по курсу необходимо менять шаг рулевого винта. Это можно выполнить с помощью миниатюрного электродвигателя, например, типа ДК-5-19 с редуктором. Последний — из таймера (автопуска для фотоаппарата).
После первых успешных полетов можно перейти к усложнению пилотажа. Для этого надо добавить, еще . две рулевые машинки для управления автоматом перекоса. С их помощью выполняется полет «вперед-назад», «влево-вправо».
После освоения модели вертолета предлагаются различные варианты состязаний, проводимых в зале, которые могут быть аналогичны соревнованиям настоящих вертолетов: полет по маршруту, посадка в заданную точку и др.
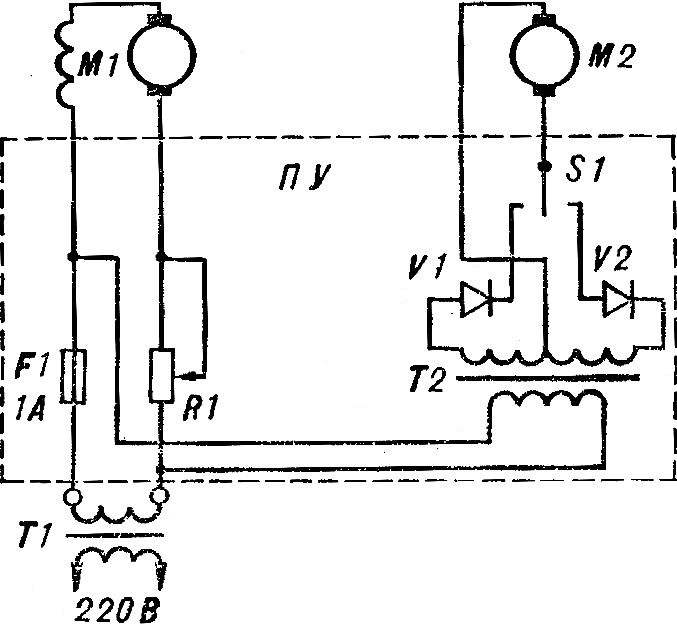
Рис. 4. Принципиальная электрическая схема модели:
М1 — силовой электродвигатель, М2 — управляющий электродвигатель, ПУ — пульт управления.
В заключение несколько слов о технике безопасности. Прежде всего необходимо тщательно выполнить все соединения токоведущих элементов как на модели, так и на пульте управления. Кроме того, на последнем обязательно установите предохранитель (рис. 4) на ток 1 А. Подключение к сети желательно через трансформатор. И наконец, при подготовке к запуску машины важно проверить надежность всей системы на земле. Для этого, привязав вертолёт к основанию, необходимо прогнать электродвигатель на всех режимах, постепенно увеличивая обороты ротора. Выполнение этих элементарных требований обеспечит безопасность полета.
Рекомендуем почитать
 ШВЕЙЦАРСКИЕ СКЛАДНЫЕ НОЖИ
ШВЕЙЦАРСКИЕ СКЛАДНЫЕ НОЖИ
+ВИДЕО. Швейцарский складной нож представляет собой набор всех необходимых инструментов, которые легко помещаются в кармане. Сама идея появилась еще в 1981 году, тогда подобными... ОСНАЩАЕМ МИКРОПАРУСНИК
ОСНАЩАЕМ МИКРОПАРУСНИК
Интересный способ имитации блоков на миниатюрных копиях старинных парусников предложил наш читатель из поселка Шерегеш Кемеровской области Е. Мусинский. В качестве материала для...