 С новинками технологии изготовления авиамоделей, применямой моделистами ГДР из города Эрфурта, наш журнал знакомил читателей в № 6 за 1977 год. Сегодня мы рассказываем о хорошо зарекомендовавшей себя в работе оригинальной системе управления стабилизаторами моделей планеров. Надеемся, что советские авиамоделисты с интересом ознакомятся с конструкцией механизма управления и возьмут его на «вооружение» в своей практической деятельности.
С новинками технологии изготовления авиамоделей, применямой моделистами ГДР из города Эрфурта, наш журнал знакомил читателей в № 6 за 1977 год. Сегодня мы рассказываем о хорошо зарекомендовавшей себя в работе оригинальной системе управления стабилизаторами моделей планеров. Надеемся, что советские авиамоделисты с интересом ознакомятся с конструкцией механизма управления и возьмут его на «вооружение» в своей практической деятельности.
В последнее время у радиоуправляемых моделей планеров все чаще встречается Т-образное и V-образное (рис. 1) оперение. Такая схема имеет определенные преимущества перед традиционной классической: немаловажно, в частности, что высоко расположенный стабилизатор меньше подвержен поломкам при посадке. Наши авиамоделисты считают эту схему наиболее удачной.
Предлагаем два варианта привода для руля высоты V-образпого стабилизатора: рычажный (рис. 2) и ползунковый (рис. 3).
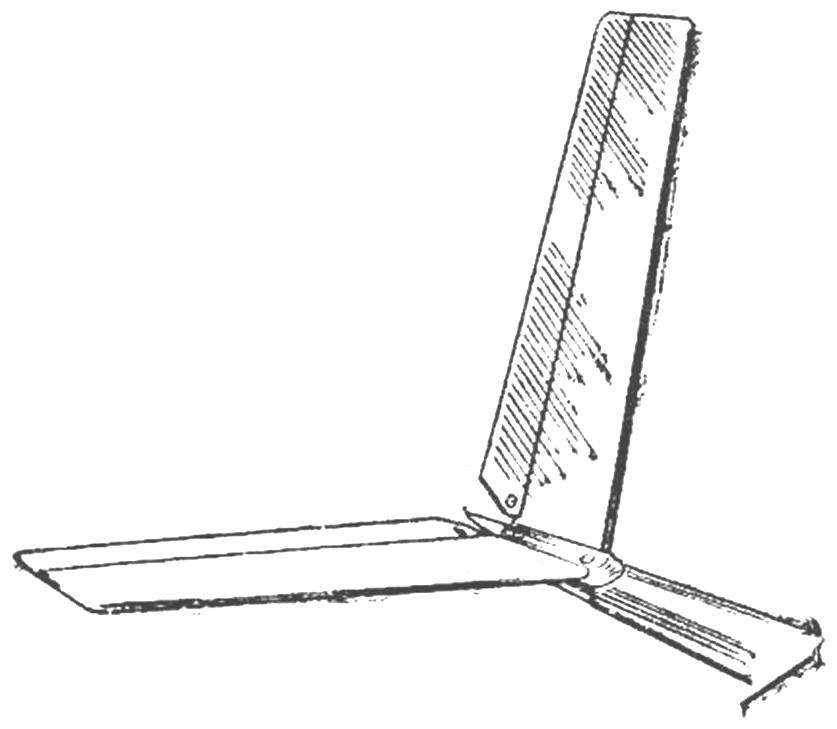
Рис. 1. V-образное хвостовое оперение модели планера.
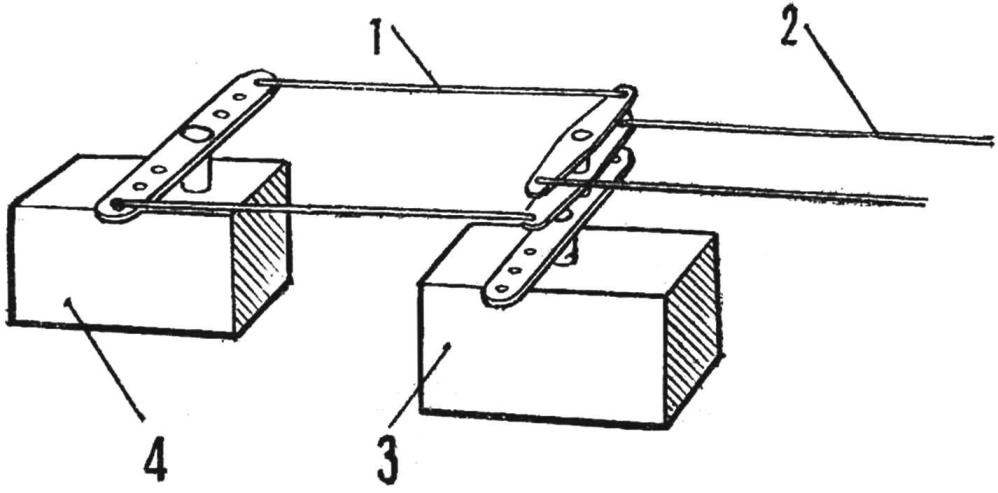
Рис. 2. Схема рычажного привода:
1 — тяги, 2 — тяги к системе управления 3 — сервомотор боковых рулей, 4 — серво мотор руля высоты.
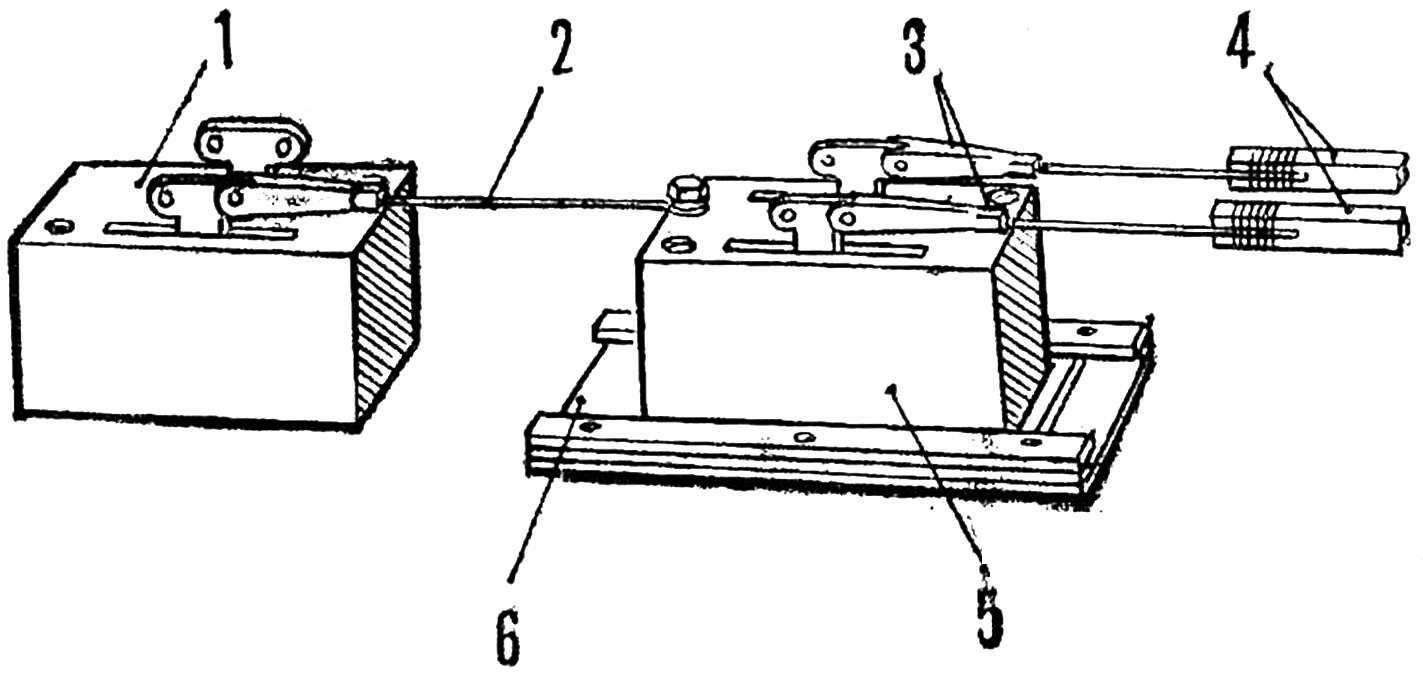
Рис. 3. Привод при помощи направляющих:
1 — сервомотор рулей высоты, 2 — штанга, 3 — вилки, 4 — штанги привода к системе управления, 5 — сервомотор боковых рулей, 6 — направляющая сервомотора.
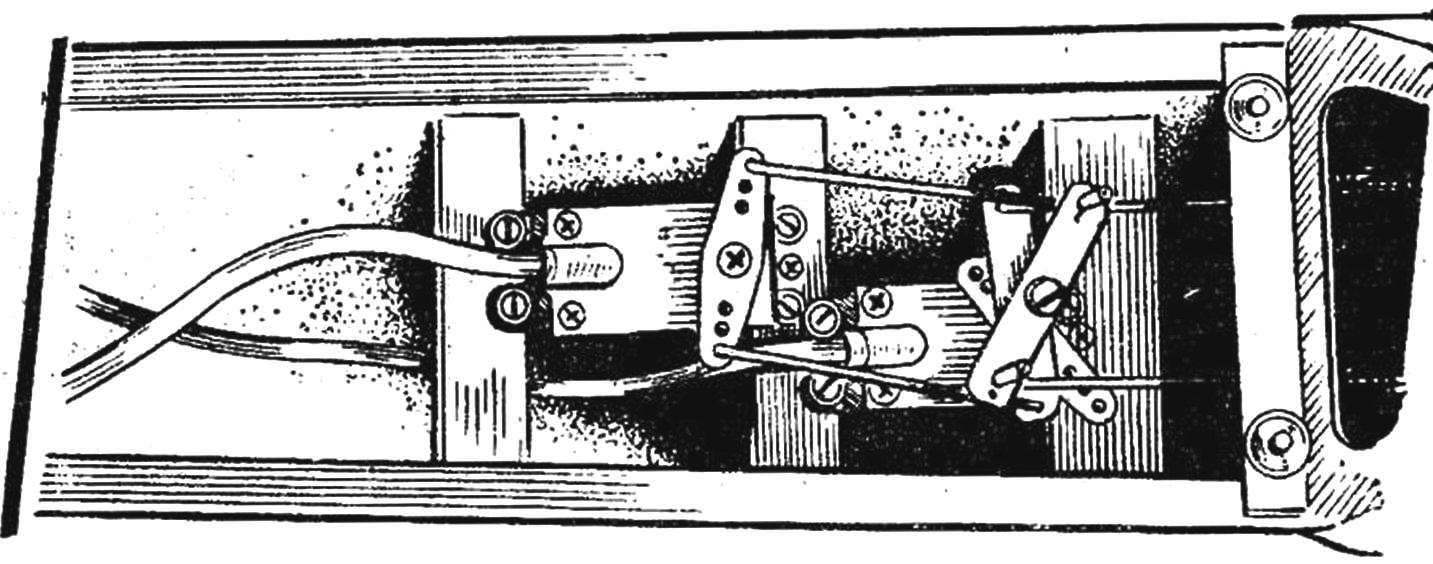
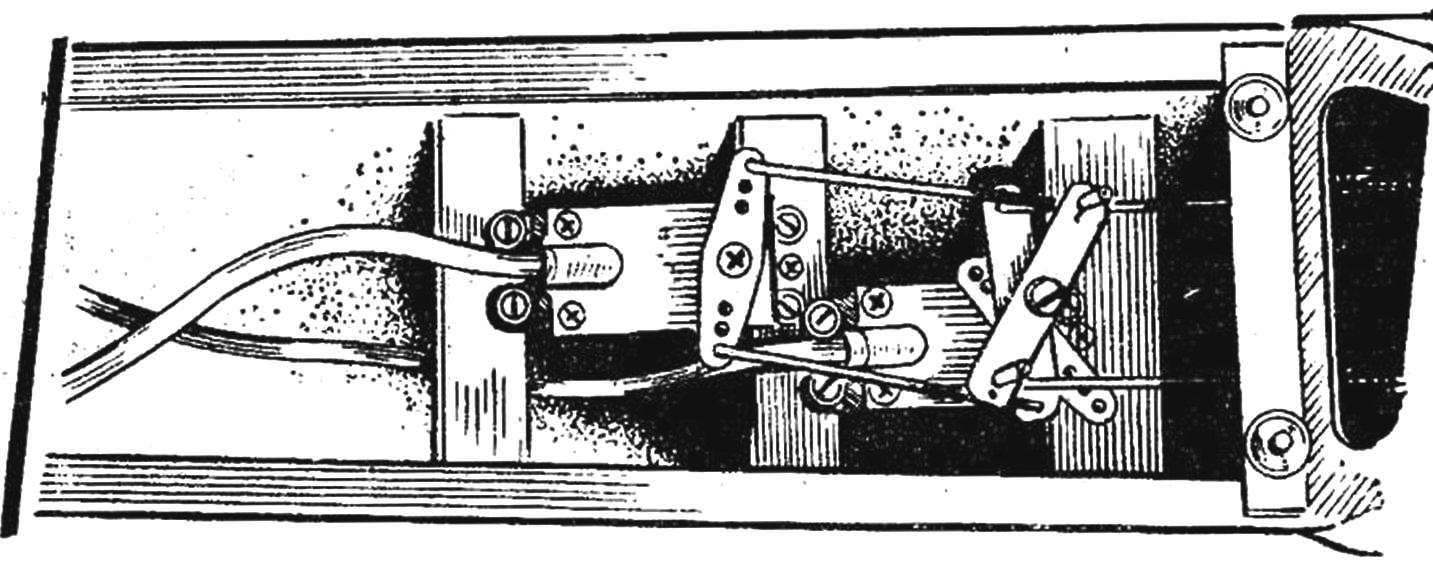
Рис. 4. Компоновка рычажного привода
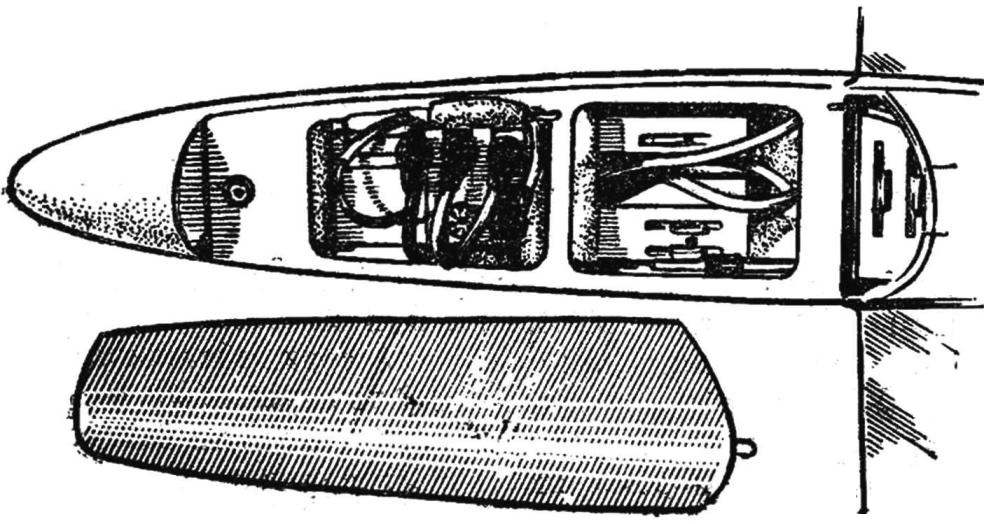
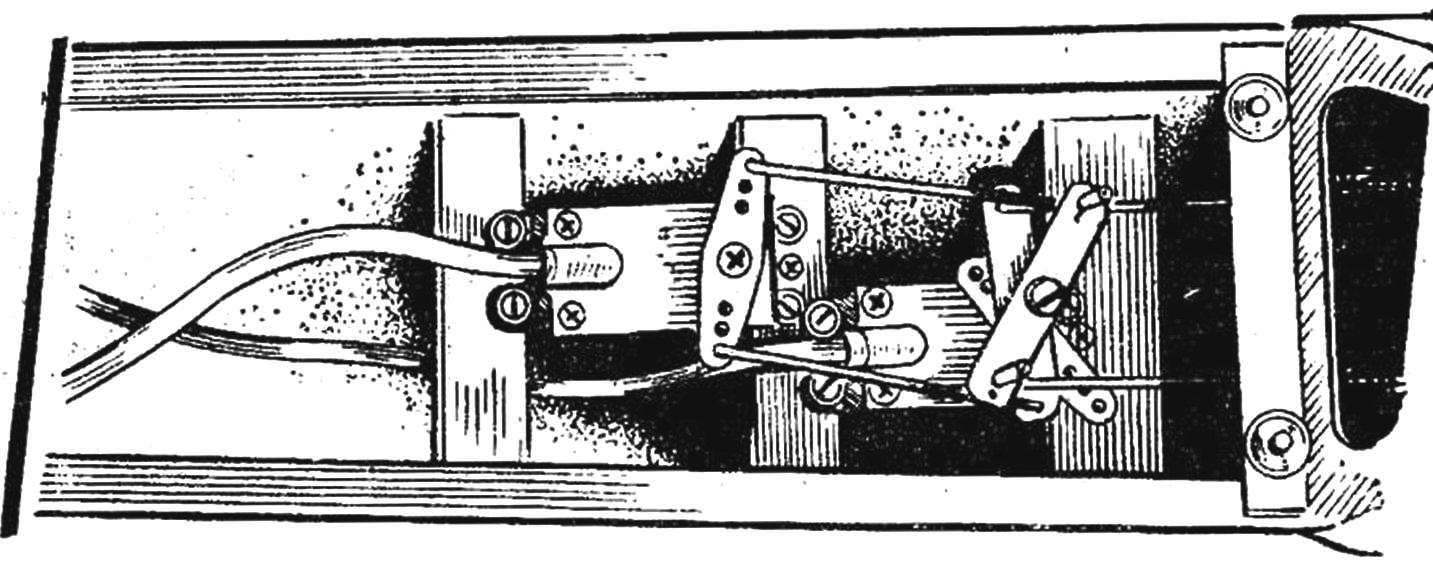
Рис. 5. Размещение аппаратуры ползункового типа на модели.
Первый удобнее применять для рулевых машинок с вертикальными валами, оканчивающимися двуплечими рычагами или круглыми муфтами с отверстия ми. Дифференциальный механизм привода состоит из двух расположенных друг над другом рычагов, подвижно вакрепленных на оси, эксцентрично установленной в муфте (рычаге) правой рулевой машинки (см. рис. 2). Величина смещения оси зависит от требуемого перемещения рулевой штанги. К свободным концам пластмассовых или металлических рычагов управления прикреплены соединительные тяги. У этого варианта есть то преимущество, что рулевые машинки можно прочно и надежно закрепить в фюзеляже модели на случай неудачной (резкой) посадки.
Второй вариант пригоден для машинок с рулевым рычагом, закрепленным па горизонтальном валу (см. рис. 3) и имеющим продольное движение. Рулевая машинка устанавливается в направляющих и может перемещаться в ту или другую сторону с помощью штанги. Особое внимание обратите на то, чтобы движение происходило легко и без люфта.
Оба варианта управления V-образным стабилизатором хорошо зарекомендовали себя на практике.
Размещение и компоновка радиоаппаратуры показаны на рисунках 4 и 5.
Г. МИЛЬ, А. ШРАМ, ГДР
Рекомендуем почитать
 САМОЛЁТ «РЫСАЧОК»
САМОЛЁТ «РЫСАЧОК»
Самолёт «Рысачок» (включая его «удлинённые» варианты) - имеет простую и технологичную конструкцию из дешёвых алюминиевых сплавов. Изготовление и сборка всех модификаций выполняются в... МИНИ-ЯХТА «АВОСЬКА»
МИНИ-ЯХТА «АВОСЬКА»
Моя первая «яхта» была импровизацией в чистом виде: самая обычная надувная лодка, оборудованная в полевых условиях простейшим парусным вооружением. Сам парус был сделан из сложенного...