
Необозримы просторы нашей страны, однако далеко не везде они пронизаны развитой дорожной сетью. Во многих районах Севера, Сибири и Дальнего Востока не обойтись поэтому без самоходных машин и агрегатов, обладающих высокой проходимостью. Какую технику предлагает для этих мест промышленность? В основном гусеничные или колесные вездеходы на базе некоторых автомобильных и тракторных шасси. Есть и специальные снегоходы и снегоболотоходы индивидуального пользования. Первые чаще всего оснащаются лыжными (с воздушным винтом), лыжно-колесными и лыжно-гусеничными ходовыми системами. Несколько отличаются от них снегоболотоходы: они бывают колесными, гусеничными и колесно-гусеничными.
Практически вся перечисленная техника имеет один общий серьезный недостаток: она не отвечает требованиям экологии. Эксплуатируемые на переувлажненных полях и лугах, в летней тундре и лесотундре, лесных массивах, находящихся в зонах с большим количеством осадков, они приводят к необратимым изменениям почвы или растительного покрова. Особенно опасно это для участков, восстановление которых после травмирующего прохода транспорта происходит естественным путем.
Вот почему в последнее время вездеходная техника оценивается по комплексной системе показателей, включающей геометрические, физико-механические и экологические характеристики. Первые говорят о способности машины преодолевать неровности рельефа, вторые — передвигаться по слабым, неустойчивым или нетвердым грунтам; наконец, большое внимание уделяется механическим воздействиям ходовых систем на землю. Все это вызвало к жизни появление промышленных вездеходов на «щадящих» движителях, таких, как «сверхбаллоны», пневмокатки и «сверхкатки». А в любительской практике получило распространение конструирование индивидуального транспорта на пневмокамерах от колесных машин. В них подкупали простота конструкции и хорошие эксплуатационные качества. Кроме того, такая техника обретала дополнительное преимущество — плавучесть.

В нашей стране первые самодельные снегоходы на пневмокамерах низкого давления появились в начале 60-х годов. Это были лыжно-колесные мотоциклы с ходовой системой, выполненной по формуле 1Л+2К2 (Л — лыжа, К — колесо, первая цифра — общее число ходовых органов данного вида, вторая — число ведущих ходовых органов). Описание одного из таких вездеходов конструкции В. Лаухина было опубликовано в журнале «Моделист-конструктор» и послужило толчком не только к массовому строительству таких машин самодеятельными конструкторами, но и созданию промышленного образца, осваиваемого заводом «Башсельмаш».
Таблица 1. Собственная масса mс вездеходов на пневматиках низкого давления, кг
Число мест в машине | |||
| Формула ходовой системы | 1 | 2 | 3 |
| 1Л+2К2;3К2 | 130…180 | 220…275 | 325…400 |
| 4К2; 4К4 | 140…240 | 220…340 | 400…540 |
| 6К4; 6К6 | 320…420 | 400…520 | 480…620 |
В конце 70-х — начале 80-х годов энтузиасты техники на пневматиках низкого давления создают в основном вездеходные мотоциклы и мотоколяски, среди которых уместно отметить конструкцию Н. Сыча с формулой 3К2. Но появляются и микроавтомобили — например, машина А. Громова с ходовой системой типа 4К4.
В первой половине 80-х годов конструируются и самодельные микроавтомобили-амфибии, снабженные ходовыми системами 6К4 и 6К6 (конструкторы В. Бажуков, Г. Видякин, А. Доценко и др.), а к концу 80-х строит свой микроавтомобиль-амфибию 4К4 В. Ильин.
Во второй же половине 80-х годов появились и самодельные микроавтобусы на пневматиках низкого давления (разработчики Г. Завьялов, В. Хорьковский и В. Ряго).
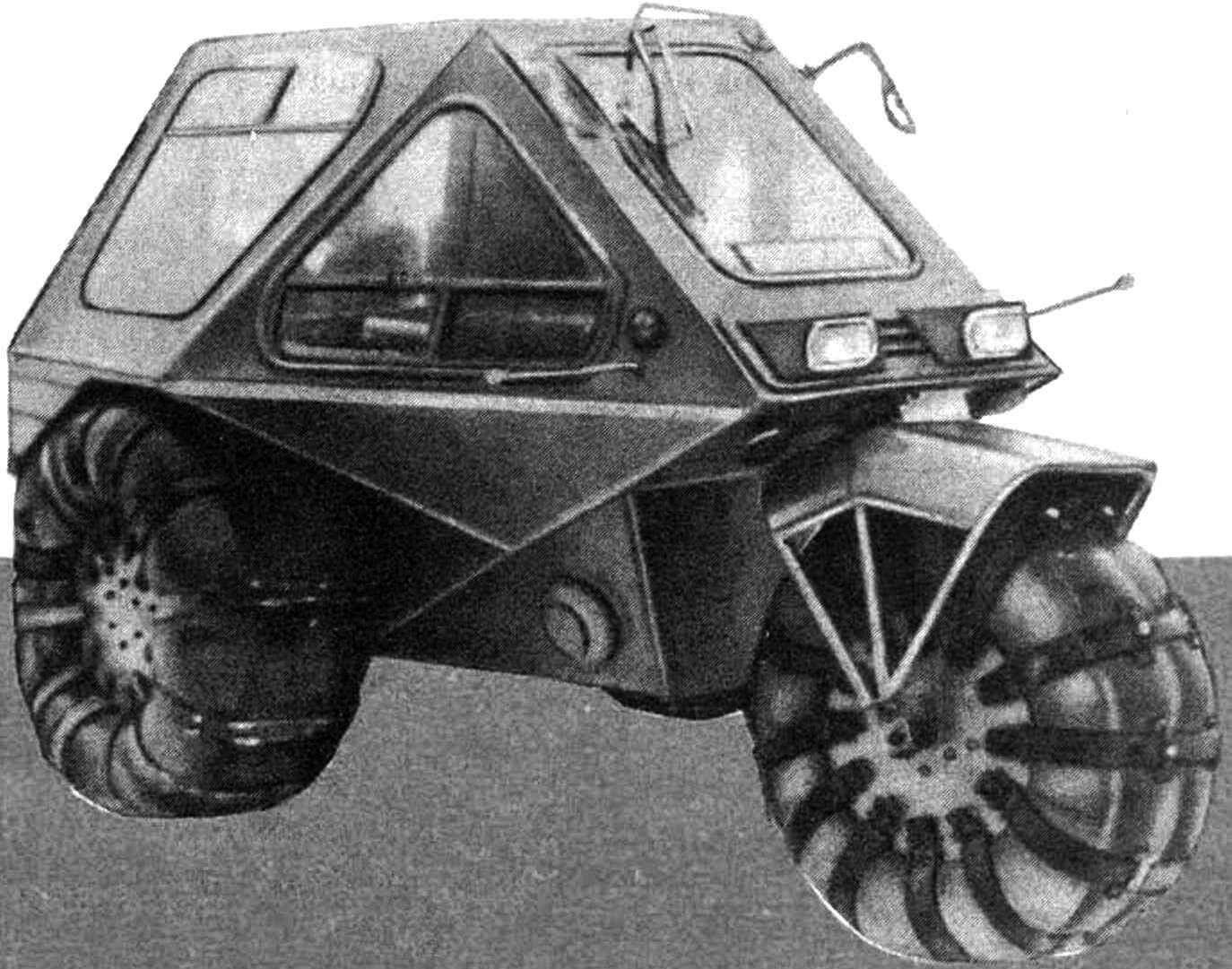
Для популяризации этой техники и обмена опытом конструирования стали регулярно проводиться смотры-конкурсы самодельных вездеходов на пневматиках низкого давления: в 1987 году — в Надыме, 1988-м — Архангельске, в 1989-м — городе Ярославле. (На представленных фотографиях — наиболее типичные варианты «пневмоходов», участвовавших в последнем, 3-м Всесоюзном смотре-конкурсе.)
Сегодня мы рассмотрим некоторые особенности конструирования и расчета вездеходов с пневматиками низкого давления. Общие сведения по проектированию самодельных транспортных средств читатели журнала могут найти в научно-технической литературе (в книгах: Родионов В. Ф., Фиттерман В. М. Легковые автомобили.— М., Машиностроение, 1971; Долматовский Ю. А. Мне нужен автомобиль.— М., Молодая гвардия, 1987, и др.; в статьях П. С. Зака, опубликованных в «М-К» № 6—9 и 11 за 1988 год, № 2 за 1989 год).
Выбор схемы и расчет вездехода на шинах низкого давления.
Приступая к созданию вездехода на пневматиках низкого давления, конструктор-любитель должен прежде всего решить главный вопрос: какую машину он будет разрабатывать? Необходимо с самого начала четко определить для себя ее назначение, вместимость (число мест, размеры и массу багажа), условия эксплуатации. Сопоставляя сформулированную таким образом задачу и возможные варианты ее решения, разработчик намечает общий замысел (концепцию) будущего вездехода.
Представив себе проектируемый вездеход в целом, конструктор затем переходит к выбору его элементов: двигателя, трансмиссии, ходовой и тормозной систем, рулевого управления, несущих элементов, кабины и т. п. Важнейшей характеристикой создаваемой машины, требующей особо внимательного отношения, является формула ходовой системы. Окончательное решение должно приниматься после сопоставления желаний и возможностей.
Следующий этап проектирования — определение основных конструктивных параметров вездехода: собственной (снаряженной), полезной и полной массы; размеров пневматиков (шин)мощности двигателя; передаточных чисел силовой передачи (трансмиссии).
Для ориентировочного расчета собственной массы вездехода mс (в кг) можно воспользоваться данными таблицы 1. Точное значение собственной массы машины находится как сумма масс всех ее составных частей.
Полезная нагрузка (полезная масса) вездехода mп.н. рассчитывается по формуле:
mп.н. = iм mчел. + mбаг.,
где iм — число мест;
mчел. ≈ 75 кг — средняя масса взрослого человека;
mбаг. — масса багажа, кг.
Полная масса mп, вездехода определяется по формуле:
mп. = mс + mп.н.
После расчета полной массы необходимо найти ее распределение по отдельным осям и колесам и выявить наиболее нагруженные из них. В первом приближении можно принять, что на задние колеса мотоциклов-вездеходов и мотоколясок приходится 70… 75% от полной массы, а у автомобилей-вездеходов полная масса распределяется по осям и колесам равномерно.
Таблица 2. Максимальная и эксплуатационная нагрузка пневматиков разных размеров при давлении воздуха, равном 0,2…0,3 кгс/см2
| Размеры пневматика | Нагрузка, кгс | |
максимальная | эксплуатационная | |
| DxB-d (в мм): | ||
| 950×350-300 | 120…135 | 85,5…95 |
| 1065×420-457 | 170…185 | 120…130 |
| 1100×400-533 | 155…170 | 110…120 |
| 1300×530-533 | 315…340 | 220…240 |
| 1500×600-635 | 470…515 | 330…360 |
| 1600×600-635 | 560…600 | 390…420 |
| V-d (в дюймах) | ||
| 11,00-18 | 115…120 | 80…85 |
| 12,00-18 | 140…155 | 100…110 |
| 12,00-20 | 150…165 | 105…115 |
| 14,00-20 | 230…250 | 160…175 |
| 16,00-20 | 330…360 | 230…250 |
| 16,00-24 | 340…370 | 240…260 |
| 18,00-24 | 485…530 | 340…370 |
По весовой нагрузке на колеса выбираются размеры пневматика. Для этого можно воспользоваться данными таблицы 2 или формулой:
Gпн.экспл.~0,7Gпн.макс.~0,25(pв+1)(D2-d2)B,
где Gпн.экспл.. — эксплутационная нагрузка пневматика, кгс;
Gпн.макс. — максимальная нагрузка пневматика, кгс;
pв- давление воздуха в пневматике (избыточное), кгс/см2;
D — наружный диаметр пневматика, дм;
d — посадочный диаметр, дм;
В — ширина профиля, дм.
У экологичных вездеходов давление воздуха в пневматике должно быть не более 0,2… 0,3 кгс/см2.
Максимальную мощность двигателя nдв.макс. (в л. с.) рекомендуется рассчитывать по формуле:
nдв.макс.=10-3Nуд.mп, где Nуд.=20… 35 л. с./т — удельная мощность (энергонасыщенность) машины.
Большие числовые значения удельной мощности применяют к расчетам мотоциклов и мотоколясок, меньшие — микроавтомобилей.
По максимальной мощности двигателя можно ориентировочно найти его рабочий объем Vp в см3, используя для этой цели данные таблицы 3.
Таблица 3. Максимальные значения мощности, развиваемой двигателями, применяемыми на вездеходах, при различной величине рабочего объема
| Vp, смЗ | 125 | 150 | 175 | 200 | 350 | 500 |
| nдв.макс.,л.л. | 5,5…7,5 | 8,5…12 | 10,5…14 | 12…16 | 21…28 | 30…40 |
Выбирая для вездехода конкретный двигатель, необходимо учитывать, что он должен иметь принудительное охлаждение. Силовые агрегаты мотороллеров и мотоколясок снабжены системой принудительного охлаждения. Мотоциклетные же, устанавливаемые на вездеходы, должны оснащаться либо вентилятором с приводом от коленчатого вала, либо эжектором, использующим энергию от отработавших газов, и кожухом, направляющим поток воздуха к охлаждаемым поверхностям двигателя.
Расчет минимального iтр.мин и максимального iтр.макс (передаточных чисел трансмиссии) следует выполнять по формулам:
iтр.мин =0,377Rкnмакс./Vмакс.
iтр.макс= iтр.мин *iкп.макс./iкп.мин.
где Rк — радиус качения колеса, м, равный 0,475D;
nмакс — максимальная частота вращения вала двигателя, мин-1;
Vмакс. — максимальная скорость вездехода, км/ч (45 км/ч);
iкп.мин. , iкп.макс — минимальное и максимальное передаточные числа коробки передач.
На самодельных вездеходах, как правило, применяются силовые агрегаты (СА) от мотороллеров, мотоколясок, мотоциклов, содержащие двигатель и часть механизмов трансмиссии: первичную (моторную) передачу (МП), сцепление (СЦ), коробку передач (КП). В качестве остальных механизмов трансмиссии используются как готовые узлы и агрегаты промышленного изготовления (главные передачи, межколесные дифференциалы), так и самодельные устройства, необходимость изготовления которых вызвана конструктивными особенностями создаваемой машины и отсутствием таких устройств в продаже.
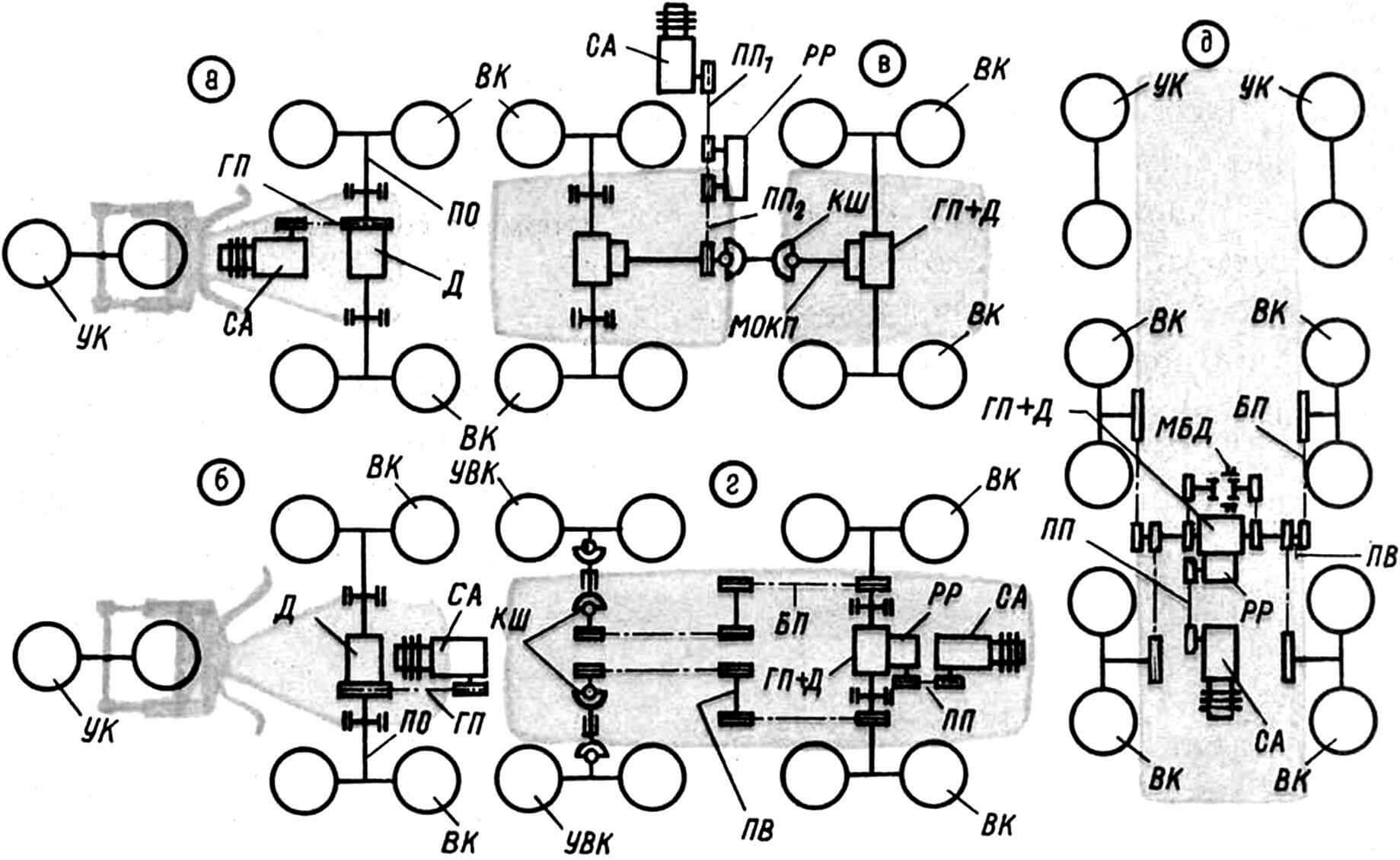
а — мотоцикл 3К2; б — мотоколяска 3К2; в — микроавтомобиль 4К4 с шарнирной рамой; г — микроавтомобиль 4К4 с управляемыми колесами; д — микроавтомобиль 6К4 с управляемыми колесами.
Типовые кинематические схемы силовых передач любительских вездеходов показаны на рисунке 2.
Самыми простыми являются трансмиссии вездеходных мотоциклов (рис. 2,а) и вездеходных мотоколясок (рис. 2,б), выполненных по схеме 3К2 (или 1Л — 2К2). От силового агрегата (СА) вращение цепной главной передачей (ГП) передается межколесному дифференциалу (Д) и далее полуосям (ПО) ведущих колес (ВК). Управляемые колеса (УК) — неведущие.
Более сложную конструкцию имеют силовые передачи микроавтомобилей-вездеходов.
Трансмиссия полноприводного двухосного вездехода с шарнирной рамой (рис. 2,в) содержит реверс-редуктор (РР), промежуточные цепные передачи (ПП1 и ПП2) и межосевую карданную передачу (МОКП).
У полноприводного двухосного вездехода с передними управляемыми колесами (рис. 2,г) силовая передача включает промежуточные валы (ПВ), цепные бортовые передачи (БП) и карданные шарниры (КШ) в устройствах для привода управляемых ведущих колес (УВК).
Силовая передача трехосного микроавтомобиля-вездехода, выполненного по схеме 6К4 (рис. 2,д), близка по конструкции к силовой передаче двухосного вездехода с управляемыми колесами (рис. 2,г).
Очень сложными являются трансмиссии полноприводных трехосных микроавтомобилей. Здесь уместно подчеркнуть, что значительное усложнение конструкции силового привода, вызванное применением ведущего моста с управляемыми колесами, как правило, несоизмеримо с получаемым за счет этого улучшением проходимости машины.
Некоторые самодеятельные конструкторы применяют в силовых передачах механизмы блокировки дифференциалов (МБД), что существенно повышает проходимость машин на скользких поверхностях.
Сопоставляя схемы силовых передач, показанные на рисунке 2, можно выделить повторяющиеся структурные элементы вездеходов: силовые агрегаты, промежуточные и бортовые цепные передачи, главные передачи с межколесными дифференциалами и реверс-редукторами, колеса с пневматиками низкого давления и др. Это обстоятельство приводит к выводу о возможности создания агрегатно-унифицированных семейств вездеходов и организации промышленного производства наиболее сложных типовых агрегатов и узлов для самодельных конструкций.
После определения общего облика параметров создаваемой машины, формулы ходовой системы и схемы трансмиссии необходимо выбрать конструкцию и рассчитать параметры отдельных агрегатов, механизмов и систем и приступить к разработке компоновки будущего вездехода: сначала компоновочной схемы, а затем компоновочного чертежа.
СЕКРЕТЫ КОМПОНОВКИ
В предыдущей статье («М-К» № 1 за 1990 год) мы рассмотрели проблемы выбора общей схемы и методы расчета основных параметров вездехода на пневматиках низкого давления. Следующий этап проектирования — разработка компоновочных схемы и чертежа, на которых изображается создаваемая машина как техническая система, состоящая из согласованных между собой ее структурных элементов (составных частей): двигателя, силовой передачи (трансмиссии), ходовой системы, тормозного и рулевого управления, кузова, приводов управления, электрического и прочего оборудования.
Сначала разрабатывается эскиз — компоновочная схема. Она определяет размещение в машине водителя, пассажиров, багажника, расположение основных агрегатов и узлов, форму и размеры характерных объемов (отделений, помещений) и машины в целом. Разработка схемы значительно упрощается при использовании в конструкции создаваемой машины готовых агрегатов и узлов. Компоновочная схема дает исходную информацию для конструирования недостающих составных частей машины.
По чертежам агрегатов и узлов вносятся коррективы в компоновочную схему, ее насыщают конструкционными подробностями, и в итоге она превращается в компоновочный чертеж, объединяющий отдельные решения в единую, комплексную разработку — конструкцию машины в целом.
При компоновке машины конструктор должен учесть большое число различных факторов (число мест, вместимость багажника, формулу ходовой системы, развесовку машины, ее маневренность) и найти оптимальное решение. Это можно сделать путем сравнения альтернативных вариантов. При проработке промежуточных и окончательного вариантов необходимо идти на компромиссы, находить в каждом конкретном случае золотую середину. Большую помощь разработчику может оказать изучение уже осуществленных конструкций.
На Всесоюзных смотрах-конкурсах самодельных вездеходов на пневматиках низкого давления было представлено множество машин.
Дать анализ конструкций всех этих машин затруднительно, да и необходимости в этом нет. Логичнее классифицировать их, выделив следующие группы: мотоциклы, мотоколяски, микроавтомобили и микроавтобусы.
Специфической особенностью всех рассматриваемых вездеходов является применение на них высокоэластичных пневматических шин (пневматиков) с увеличенными габаритными размерами (наружным и посадочным диаметром, шириной профиля). Такие пневматики делают ходовые системы вездеходов практически безвредными для оттаявших и переувлажненных грунтовых, дерновых и покрытых мелкими растениями поверхностей; подобный транспорт способен работать на пойменных лугах и болотах, в тундре и лесотундре.
Вездеходные мотоциклы конструируют, как правило, одно- или двухместными с ходовыми системами формул 1Л+2К2 и 3К2 (Л — лыжа, К — колесо, первая цифра — общее число ходовых органов данного вида, вторая — число ведущих ходовых органов). Лыжно-колесные мотоциклы относятся к снегоходам, а колесные — к снегоболотоходам.
Вездеходные мотоколяски оснащаются ходовыми системами 1Л+2К2, 3К2 и силовыми агрегатами от мотороллеров, размещаемыми сзади (см., например, «М-К» № 2 за 1989 г.). Мотоколяски имеют одно- или двухместные кабины открытого или закрытого типа.
Микроавтомобили-вездеходы выполняют одно-, двух-, трех- и четырехместными с двухосными (4К2, 4К4) и трехосными (6К4, 6К6) ходовыми системами, с передним или задним расположением двигателя. Изменение направления движения на микроавтомобилях осуществляется либо поворотом передних управляемых колес, либо через шарнирно сочлененную раму (см., например, «М-К» № 1 за 1989 г.). Для уменьшения радиуса поворота у некоторых микроавтомобилей с управляемыми колесами применяется «подтормаживание» внутренних (отстающих) колес.
Вездеходные микроавтобусы впервые появились на смотре-конкурсе 1989 года: 5-местный двухосный (4К4) с шарнирной рамой; 8-местный двухосный (4К4) с шарнирной рамой; 6-местный трехосный (6К6) с передними управляемыми колесами.
Из краткого обзора конструкций самодельных вездеходов видно, что наибольшим разнообразием технических и компоновочных решений отличаются микроавтомобили. Поэтому технологию разработки компоновочной схемы вездехода на пневматиках целесообразно рассмотреть на примере микроавтомобилей.
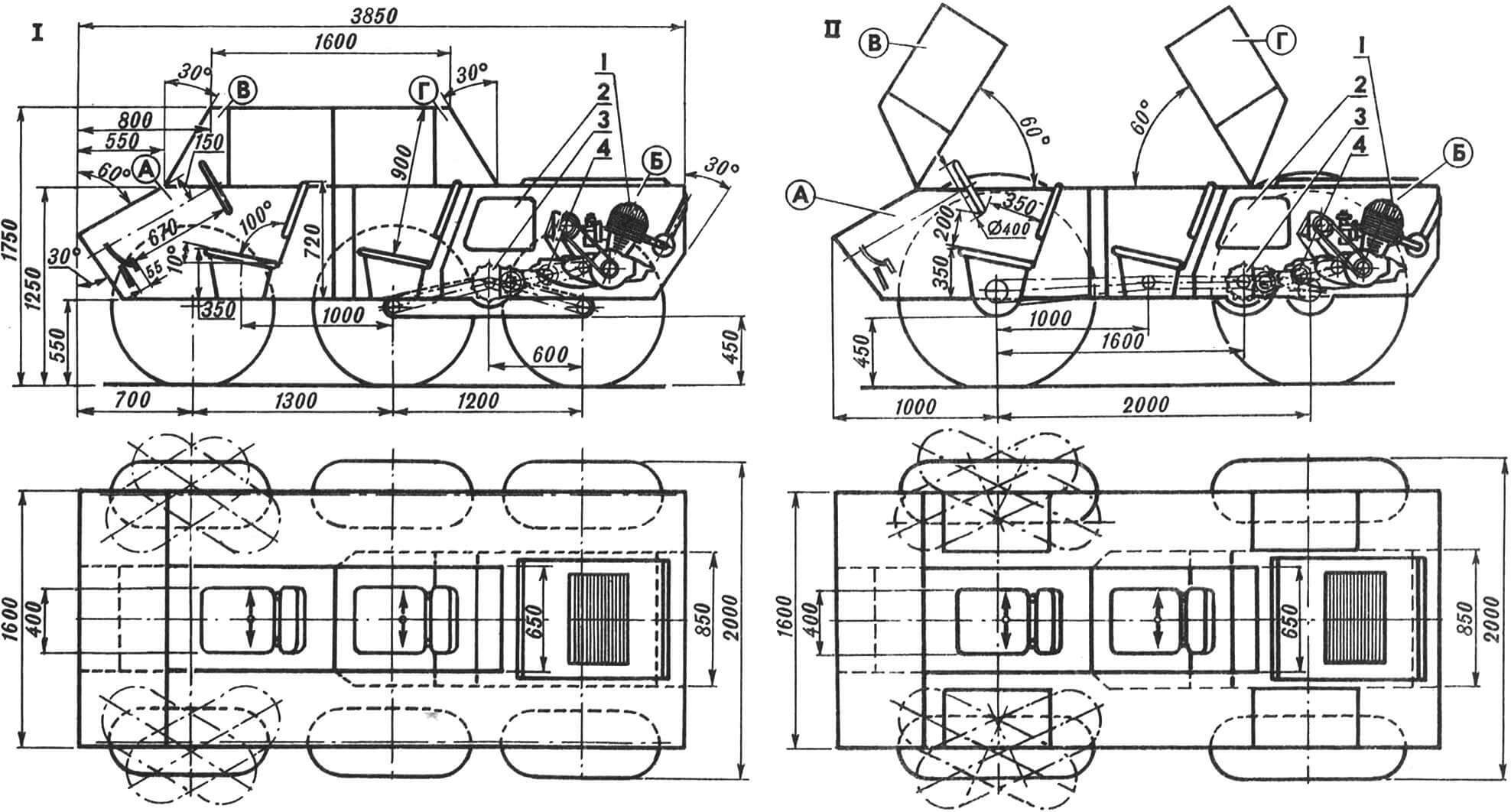
1 — силовой агрегат, 2 — топливный бак, 3 — ведущий мост с реверс-редуктором, 4 — промежуточная передача.
А — отделение для водителя и пассажира; Б — моторно-трансмиссионное отделение; В, Г — передний и задний колпаки.
Сначала следует выбрать масштаб для будущей схемы. Практика показывает, что предварительную компоновку целесообразно делать в масштабе 1:10 или 1:5. Такой масштаб упрощает вычерчивание машины и ее структурных элементов Окончательную компоновку лучше выполнять в масштабе 1:1 или 1:2; это повышает точность определения формы и размеров машины, агрегатов, узлов.
Каждый из альтернативных вариантов компоновочной схемы создаваемого вездехода целесообразно разрабатывать в такой последовательности:
1. Вычертить кузов с учетом размещения в нем передних, задних и смежных сидений.
Для проверки соотношений вычерченных сидений и кузова с размерами человеческого тела целесообразно использовать складной шаблон «стандартного» человека, выполненный в соответствующем масштабе. (Другие практические рекомендации можно найти, например, в книге В. Ф. Родионова и Б. М. Фиттермана «Проектирование легковых автомобилей». М., Машиностроение, 1980.)
2. Нанести на схему колеса с пневматиками выбранного типоразмера. Число и расположение колес должно соответствовать формуле ходовой системы и способу поворота, принятым при определении общего замысла (концепции) машины.
3. Расположить на компоновочной схеме двигатель, агрегаты и узлы силовой передачи, органы управления машиной (рулевое колесо, педали и рычаги), багажник.
4. Нанести на схему контуры кузова и машины в целом, окна, двери, кожухи колес, крылья и т. п.
5. Выбрать конструкцию остова и подвески и изобразить их на схеме.
6. Прикинуть развесовку машины — распределение собственной и полной массы по осям.
7. Определить с помощью геометрических построений минимальный радиус поворота машины.
При разработке компоновочной схемы микроавтомобиля необходимо обеспечить компактность его конструкции — минимальные габариты и объем, а следовательно, минимальную собственную и полную массу: от нее зависят все важнейшие эксплуатационные свойства (динамичность и топливная экономичность, проходимость и экологичность).
Распределение массы двухосной машины по осям можно рассчитать по формулам:
М1 = (m1b1 + m2b2 +…+ mnbn)/L;
М2 = (m1a1 + m2a2 +…+ mnan)/L,
где М1, М2 — масса, приходящаяся соответственно на переднюю и заднюю оси;
m1, m2… mn — массы составных частей машины, водителя и пассажиров, груза;
а1, а2… аn — расстояние по горизонтали от центров учитываемых масс до передней оси;
b1, b2… bn — расстояние по горизонтали от центров учитываемых масс до задней оси;
L — база машины (расстояние между осями).
Для трехосной машины рассчитываются массы, приходящиеся на переднюю ось (М1) и на балансирные тележки (М23). При этом под колесной базой машины понимается расстояние между передней осью машины и осью балансирных тележек. С учетом специфики трехосной машины определяются и координаты учитываемых масс (до передней оси и до оси балансирных тележек). Масса, приходящаяся на балансирные тележки, распределяется между средней и задней осями поровну.
В качестве примера на рисунках показаны упрощенные (без лишних подробностей) компоновочные схемы двух микроавтомобилей-вездеходов: трехосного (6К4) и двухосного (4К4), отличающихся высокой степенью унификации. При разработке компоновочных схем были приняты следующие исходные данные: число мест — 2; масса багажа — 50 кг; масса машины в снаряженном состоянии (собственная) — 500 кг (не более); давление воздуха в шинах — 0,25 кгс/см2 (не более); максимальная скорость — 45 км/ч. Автомобили должны обладать способностью преодолевать вплавь небольшие водные преграды.
На разрабатываемых автомобилях-вездеходах целесообразно применить агрегаты и узлы от мотоколяски С3Д (имеющей близкие с ними весовые и скоростные параметры): двигатель с моторной передачей, сцеплением и коробкой передач в сборе, главную передачу с реверс-редуктором в сборе, механизмы тормозного и рулевого управления, контрольно-измерительные приборы и другие. Шины двухосного вездехода — из пневмокамер размером 14,00—20 (1300X400—508),трехосного — 1065X420—457, снабженные протекторными и грунтозацепными лентами. Плавные повороты автомобилей-вездеходов осуществляются с помощью передних управляемых колес. Предусмотрена возможность подтормаживания колес внутреннего (отстающего) борта при крутых поворотах. Кузова обоих автомобилей-вездеходов имеют герметичные основания, состоящие из носового и кормового листов, бортов и днища; снабжены двумя застекленными колпаками, открывающимися вперед и назад, крыльями и подножками. Сиденья при посадке и высадке водителя и пассажира сдвигаются вбок.
По конструктивным параметрам и показателям эксплуатационных свойств оба автомобиля-вездехода практически одинаковы. Поэтому самодеятельный конструктор может принять любую из предлагаемых компоновочных схем за основу для дальнейшей разработки. В качестве прототипа будущей машины может быть выбран и другой микроавтомобиль, который по своему решению более полно удовлетворяет индивидуальные запросы автолюбителя, например с передним расположением силового агрегата.
ДВИГАТЕЛЬ И ТРАНСМИССИЯ ВЕЗДЕХОДА НА ПНЕВМАТИКАХ НИЗКОГО ДАВЛЕНИЯ
На самодельных вездеходах, как правило, применяют силовые агрегаты от мотоколясок или мотороллеров, реже от мотоциклов. Дело в том, что первые оснащены вентиляторами для принудительного охлаждения, обязательного для двигателей вездеходов; имеют наиболее приемлемую для большинства любительских машин мощность; а также небольшие габариты и массу. В то же время ограниченный типаж таких двигателей сужает возможности самодеятельных конструкторов в создании машин, выходящих за рамки известных технических решений.
Несколько больший выбор у конструктора, ориентирующегося на мотоциклетные двигатели. Однако надо помнить, что такой мотор должен быть оборудован системой принудительного охлаждения — вентилятором с кожухом, подводящим охлаждающий воздух к узлам и деталям, имеющим высокую температуру, или эжектором.
Двигатели мотоциклов, мотороллеров и мотоколясок имеют воздушное охлаждение, что существенно упрощает их конструкцию и уменьшает массу, повышает надежность работы (двигатели воздушного охлаждения легче запускаются при низких температурах окружающего воздуха по сравнению с двигателями жидкостного охлаждения, не боятся размораживания). Недостаток их — повышенная шумность. Однако ослабить действие шума можно установкой двигателя в отсеке со звукоизоляцией.
Применяемые на самодельных вездеходах поршневые ДВС имеют не полностью уравновешенные движущиеся массы кривошипно-шатунного механизма и отличаются повышенной неравномерностью крутящего момента, что обусловлено малым числом цилиндров. При работе такие двигатели вибрируют. Основным способом понижения интенсивности колебаний двигателя и уменьшения нагрузок, передаваемых от силового агрегата на шасси вездехода, является применение упругой подвески силового агрегата. Упругая подвеска должна препятствовать также передаче от несущей системы (остова) машины к силовому агрегату колебаний, толчков и ударов, возникающих при движении машины по неровной дороге.
Упругие элементы подвески силового агрегата целесообразно выполнять из резины. Изменяя конфигурацию таких элементов за счет наружной формы или введения внутренних полостей, не заполненных резиной, площадь опорной поверхности и толщину элементов, можно получить требуемую упругую характеристику подвески: подвеска силового агрегата должна быть жесткой в продольном и поперечном направлениях и эластичной по вертикали.
Необходимо учитывать, что резина обладает низкой усталостной прочностью на растяжение. Поэтому опоры силового агрегата следует проектировать так, чтобы резина подвергалась только сжатию и сдвигу. Наилучших результатов в отношении службы резины можно достигнуть при комбинированном воздействии на нее сдвига и сжатия.
Для фиксации силового агрегата в продольном направлении целесообразно в переднем или заднем креплении агрегата применять опоры корытообразного профиля. Фиксацию силового агрегата в поперечном направлении лучше всего осуществлять V-образно установленными опорами. Для ограничения вертикальных перемещений агрегата рекомендуется применять упругие упоры или эластичные элементы с прогрессивно увеличивающейся при деформации жесткостью.
На самодельных вездеходах используются механические ступенчатые трансмиссии (силовые передачи) с блокированным межосевым приводом и дифференциальным межколесным или межбортовым приводом. В зависимости от конструкции механизмов, передающих мощность от силового агрегата к ведущим осям и колесам машины, они могут быть классифицированы на трансмиссии с цепными передачами, с карданными валами и комбинированные.
Ряд самодеятельных конструкторов применяют в силовых передачах вездеходов механизмы для блокировки дифференциалов, что существенно улучшает проходимость машин.
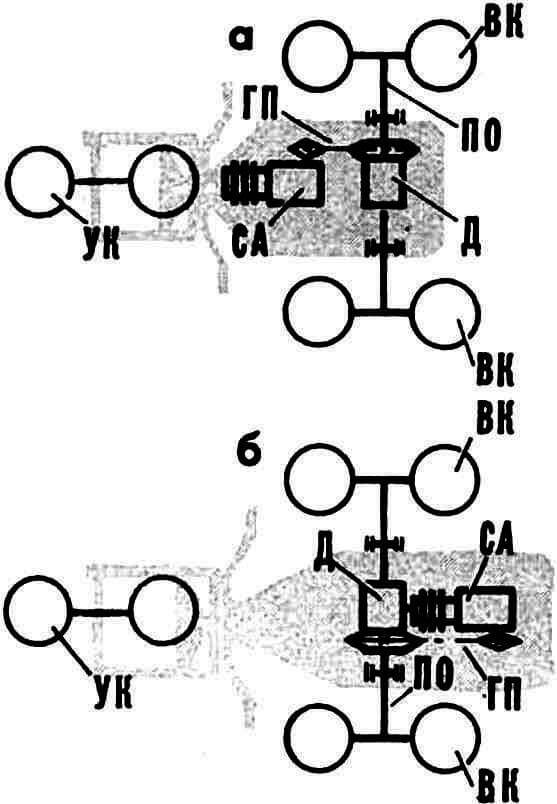
Рассмотрим ряд характерных примеров. Сравнительно простыми являются трансмиссии мотоциклов и мотоколясок на пневматиках низкого давления (рис. 1). От силового агрегата (СА), содержащего двигатель, первичную (моторную) передачу, сцепление и коробку передач, вращение передается цепной главной передачей (ГП) межколесному дифференциалу (Д), а от него — полуосям (ПО) ведущих колес (ВК). Управляемые колеса (УК) — неведущие.
Такие вездеходы создаются обычно на базе силовых агрегатов и цепных передач от серийных мотоциклов или мотороллеров. Ну а межколесные дифференциалы заимствуют от ведущих мостов легковых автомобилей.
Силовые передачи вездеходных микроавтомобилей и микроавтобусов имеют сложную конструкцию, что вызвано необходимостью привода большого числа ведущих колес: четырех — у двухосных, четырех или шести — у трехосных.
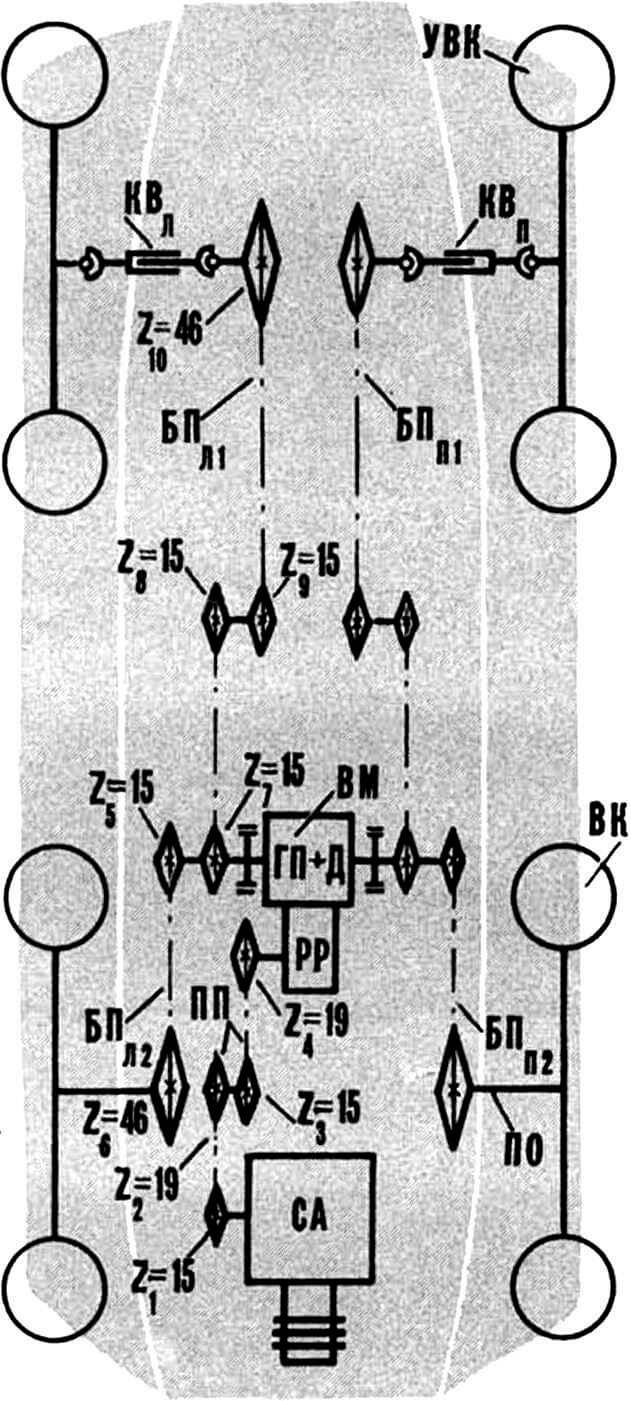
На рисунках 2 и 3 показаны трансмиссии двухосного 4К4 и трехосного 6К4 микроавтомобилей на пневматиках низкого давления, компоновочные схемы их приведены в первой части цикла «Компоновка вездехода на пневматиках низкого давления» («М-К», 1989, № 2). В этих трансмиссиях широко используются цепные передачи, что обусловлено применением силового агрегата и ведущего моста с реверс-редуктором от мотоколяски. Достоинство таких трансмиссий — в использовании одного ведущего моста для привода колес двух ведущих осей; недостаток — большое число цепных передач, требующих постоянного контроля технического состояния и частых регулировок, что затрудняет эксплуатацию машины.
Трансмиссия двухосного микроавтомобиля-вездехода 4К4 (рис. 2) содержит промежуточную цепную передачу (ПП), соединяющую силовой агрегат (СА) с реверс-редуктором (РР), ведущий мост (ВМ), бортовые цепные передачи (БПп1 и БПп2, БПл1 и БПл2), поперечные карданные валы (КВп и КВл), полуоси (ПО) ведущих колес — управляемых (УВК) и неуправляемых (ВК). Индексы 1 и 2 в обозначениях механизмов трансмиссии говорят о том, что эти механизмы кинематически связаны соответственно с передней (первой) или задней (второй) осью машины. Индексы П и Л указывают на принадлежность правому или левому борту.
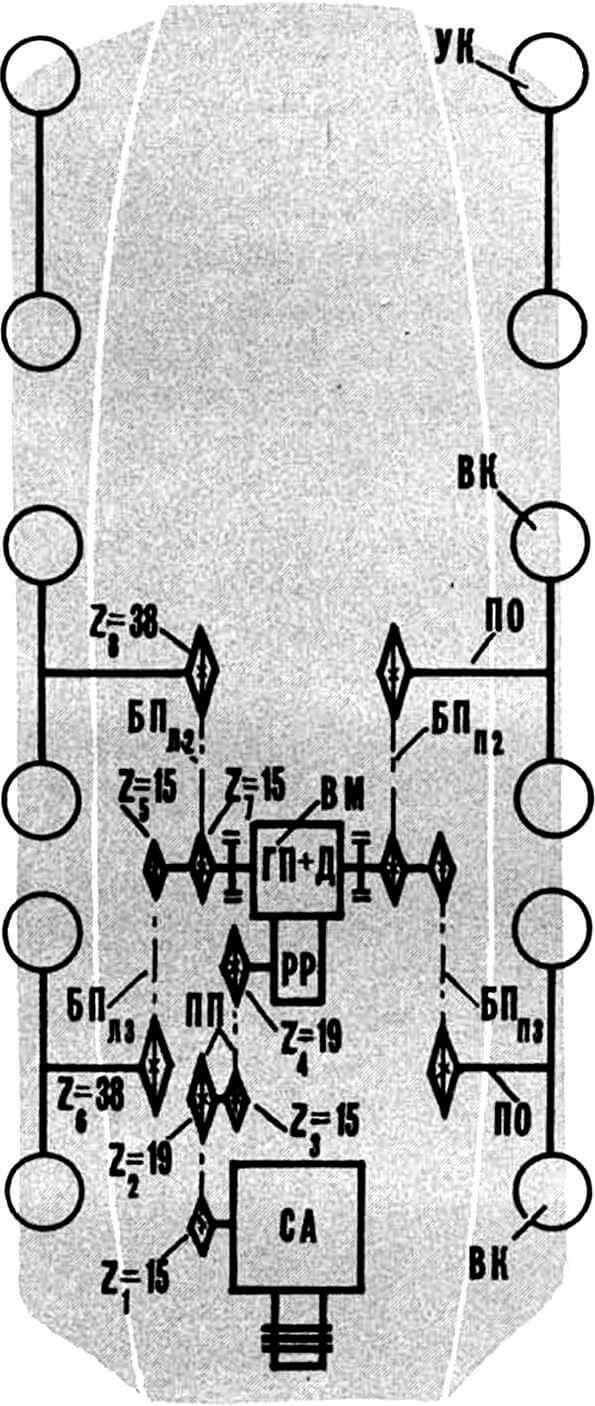
У трехосного вездехода 6К4 (рис. 3) в качестве ведущих используются колеса балансирной тележки, объединяющей среднюю (вторую) и заднюю (третью) оси. Ведущие колеса — неуправляемые, поэтому поперечные карданные валы в силовой передаче отсутствуют. В остальном же трансмиссия практически такая же, как у двухосного микроавтомобиля.
Более прогрессивными по сравнению с цепным являются вальные трансмиссии (рис. 4).
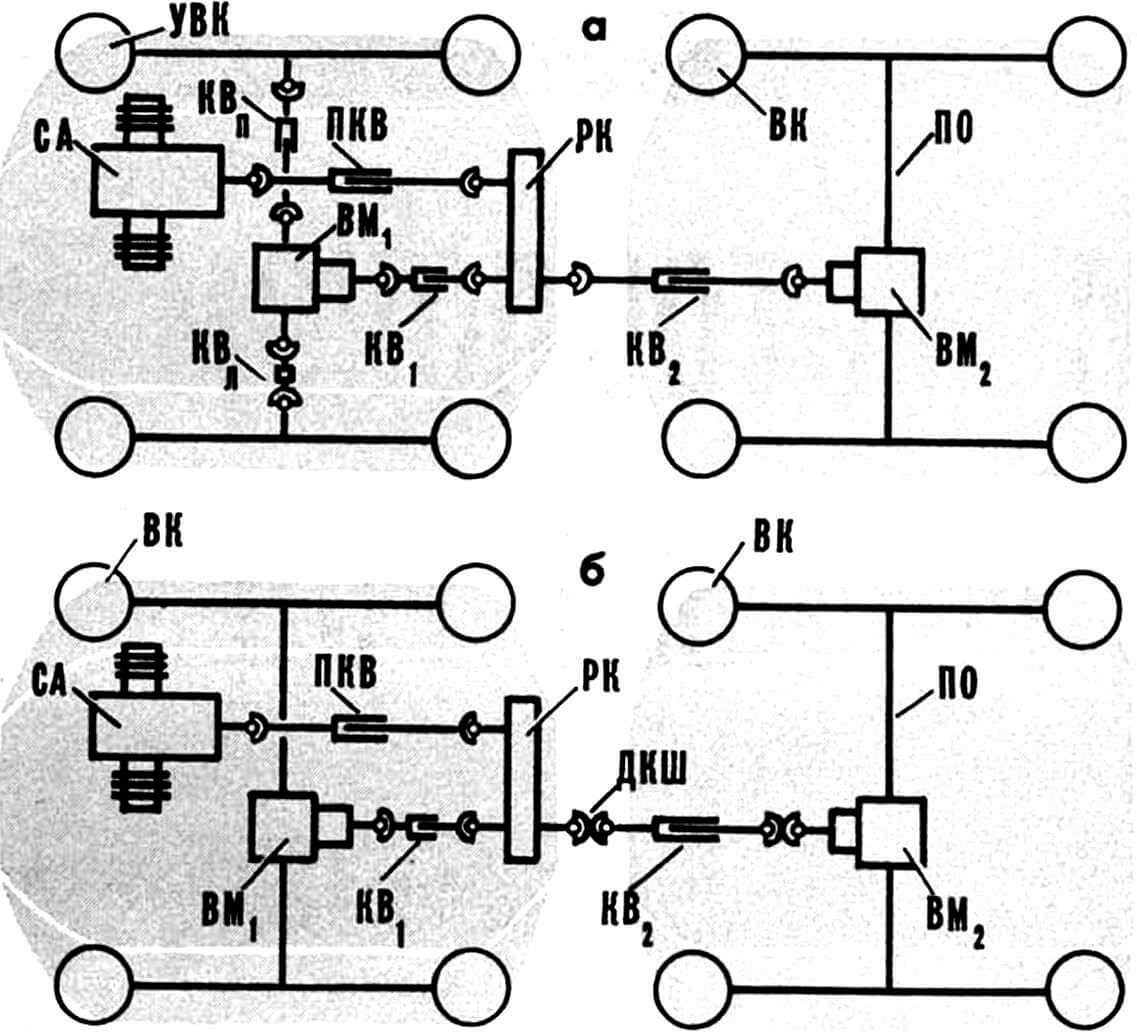
Силовая передача двухосной полноприводной машины с управляемыми колесами (рис. 4а) включает сцепление и коробку передач, объединенные с двигателем в силовой агрегат (СА), первичный карданный вал (ПКВ), раздаточную коробку (РК), продольные карданные валы (КВ1 и КВ2), ведущие мосты (ВМ1 и ВМ2) с главными передачами и дифференциалами, поперечные карданные валы (КВп и КВл), полуоси (ПО) ведущих колес.
В трансмиссии вездехода с шарнирной рамой (рис. 4б) поперечные карданные валы отсутствуют, зато у продольного карданного вала (КВ2) имеются дополнительные карданные шарниры (ДКШ), размещенные в шарнирном устройстве рамы.
Для создания вездеходов с вальными трансмиссиями целесообразно использовать силовые агрегаты тяжелых мотоциклов, карданные валы и ведущие мосты от легковых автомобилей.
Заслуживают специального рассмотрения приводы управляемых ведущих колес вездеходов.
В процессе движения машины управляемые ведущие колеса перемещаются в вертикальной и горизонтальной плоскостях. Вертикальное перемещение имеет место при повороте полуоси во внутреннем шарнире, а горизонтальное — при повороте во внешнем шарнире. Углы поворота во внутреннем шарнире, как правило, не превышают 1…2°, в то время как углы поворота во внешнем шарнире нередко достигают 30… 35°.
Отмеченные особенности движения управляемых ведущих колес вызывают необходимость пременения карданных шарниров в приводах УВК. В приводах передних ведущих колес обычных автомобилей используют: простые карданы — как на внутреннем, так и на внешнем концах полуоси; на внутреннем конце полуоси — простой кардан, на внешнем — кардан постоянной угловой скорости или сдвоенный простой; карданы непостоянных угловых скоростей, снабженные резиновыми втулками. В приводах УВК вездеходов высокая тангенциальная эластичность пневматиков низкого давления позволяет использовать простые карданы и на внутреннем и на внешнем концах полуосей.
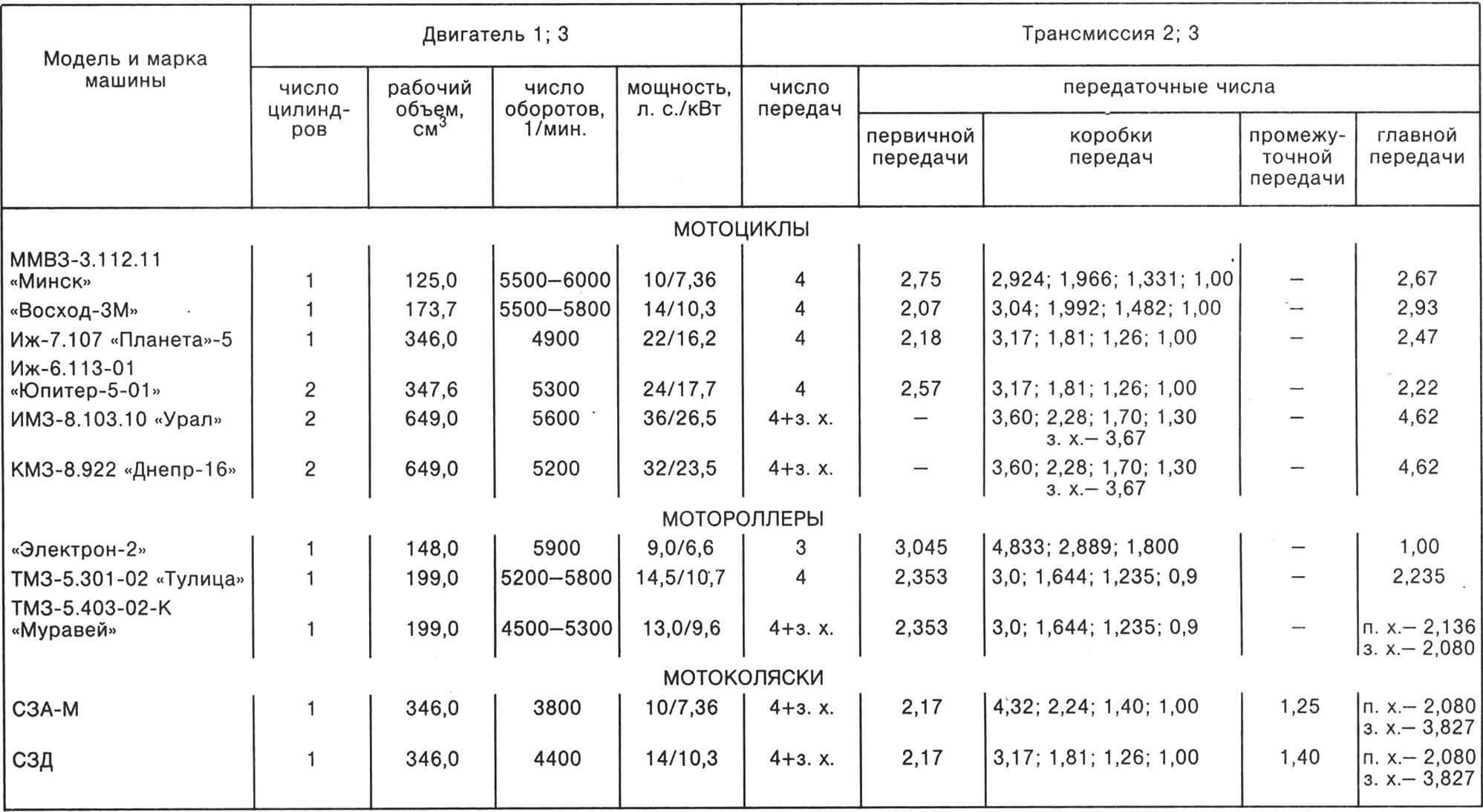
ПАРАМЕТРЫ ДВИГАТЕЛЕЙ И ТРАНСМИССИЙ МОТОЦИКЛОВ, МОТОРОЛЛЕРОВ И МОТОКОЛЯСОК
ПРИМЕЧАНИЯ:
1. Двигатели тяжелых мотоциклов ИМЗ и КМЗ — четырехтактные с оппозитным расположением цилиндров; остальные — двухтактные. Охлаждение у двигателей мотоциклов — воздушное, встречным потоком; у двигателей мотороллеров и мотоколясок — воздушное, принудительное (вентилятором).
2. Трансмиссии мотоциклов, мотороллеров и мотоколясок — механические ступенчатые. Коробки передач тяжелых мотоциклов ИМЗ и КМЗ имеют передачи как переднего хода (п. х.), так и заднего хода (з. х.); остальные — только переднего хода. У мотороллера «Муравей» и мотоколясок главные передачи объединены с реверс-редукторами, снабженными передачами переднего и заднего хода.
3. Силовые агрегаты тяжелых мотоциклов ИМЗ и КМЗ содержат двигатель, сцепление и коробку передач; остальные — двигатель, первичную (моторную) передачу, сцепление и коробку передач.
Рассмотренные примеры далеки от того, чтобы охватить все многообразие конструкций двигателей, силовых агрегатов и трансмиссий созданных вездеходов. В то же время они содержат некоторые типовые технические решения, многократно повторяющиеся в любительских машинах. Проверенные на практике и положительно зарекомендовавшие себя устройства целесообразно принять за основу при разработке новых вариантов пневмоходов.
Параметры двигателей и трансмиссий мотоциклов, мотороллеров и мотоколясок серийного производства приведены в таблице.
ХОДОВАЯ СИСТЕМА
Разговор об особенностях ходовых систем пневмоходов следует, видимо, начать с нескольких определений.
Ходовая система (ходовая часть) колесного вездехода представляет собой тележку, образованную остовом, подвеской, колесами и колесными парами. Под колесными парами понимаются параллельно или последовательно расположенные колеса, соединенные между собой осями, балками мостов, балансирами, листовыми рессорами.
Остов (несущая система) машины служит основанием, на котором устанавливаются двигатель с обслуживающими системами, механизмы силовой передачи (трансмиссии), системы тормозного и рулевого управления, кузов.
Подвеской называют совокупность устройств, с помощью которых остов опирается на колеса и колесные пары.
Главные элементы ходовой системы у пневмохода — это колеса с шинами низкого давления: они передают на дорогу силу тяжести (вес) машины, силы, вызывающие ее движение или остановку, заставляющие машину двигаться по криволинейной траектории; уменьшают передаваемые машине динамические (ударные) нагрузки, возникающие при переезде через неровности дороги.
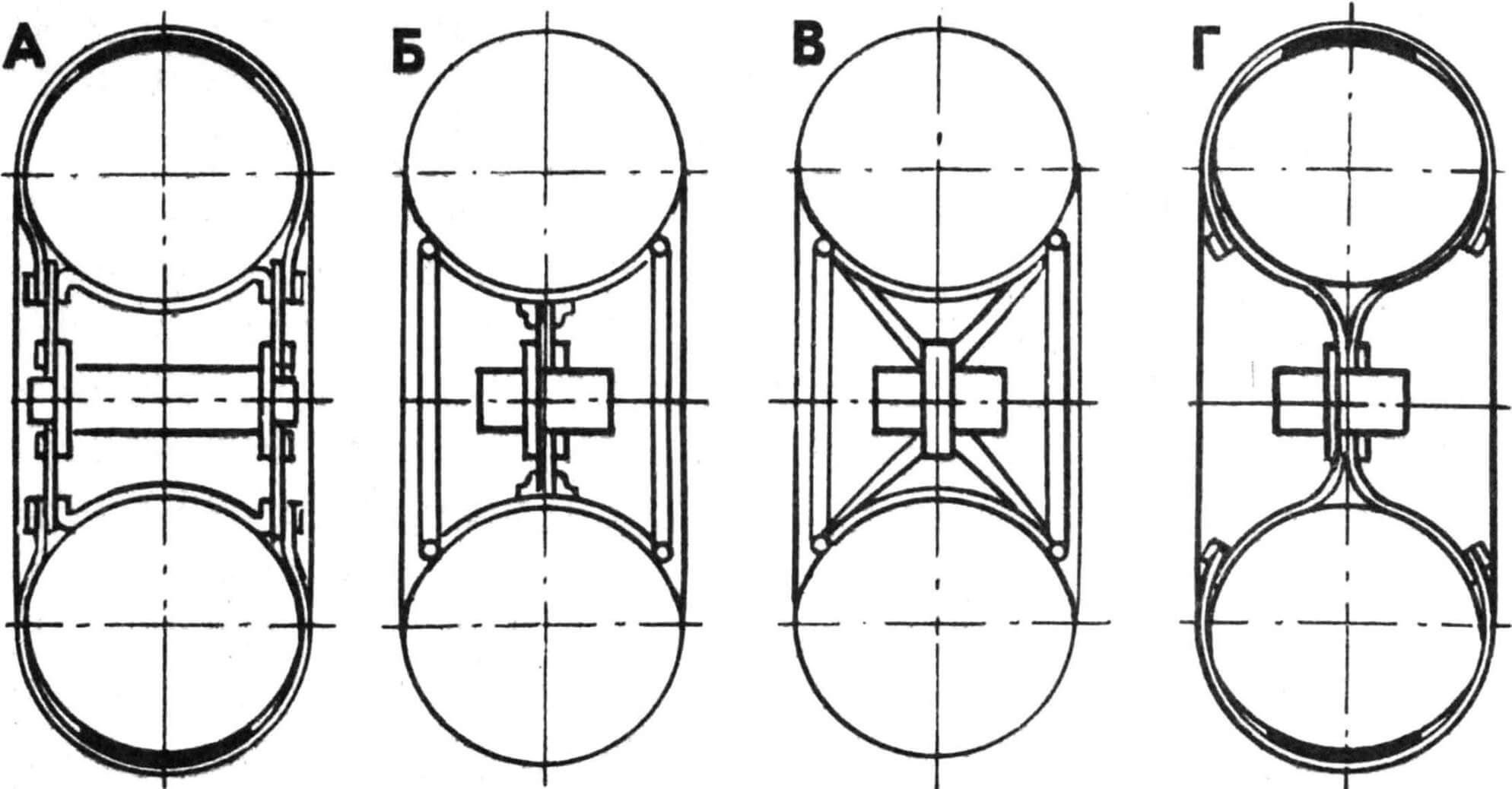
А — с двумя плоскими дисками, Б — с двумя кольцами и плоским диском, В — с двумя кольцами и спицами, Г — с двумя фигурными дисками (А, Г — с пневматиками, снабженными протекторными и стягивающими лентами, Б, В — с «голыми» пневматиками).
Колесо вездехода, кроме пневматика низкого (точнее—сверхнизкого) давления, состоит из обода, ступицы и спиц или дисков, с помощью которых обод соединяется со ступицей (рис. 1). Обод, ступица, спицы или диск (диски) в сборе образуют основание колена.
В качестве шин любительских вездеходов используются пневмокамеры от обычных транспортных средств (грузовиков, автомобильных и тракторных прицепов) — «голые» или с укладываемыми по наружной поверхности пневмокамер легкими протекторными лентами из брезента или прорезиненной кордовой ткани. Давление воздуха в пневматиках 0,2… 0,3 кгс/см2, что обеспечивает движителям вездеходов высокую проходимость по грунтам с низкой несущей способностью (и экологичность) , а их большой объем придает вездеходам плавучесть.
Пневматики, снабженные протекторными лентами, стягиваются с ободами поперечно расположенными кордовыми, брезентовыми или капроновыми ремнями (лентами). Накачанные камеры образуют в зонах перемычек ободов выпуклости, играющие роль грунтозацепов.
Заметим, что применение «голых» шин уменьшает уровень вредных механических воздействий на грунт, но в то же время ухудшает сцепление пневматиков с дорогой и делает их более подверженными износу и проколам.
Как показали неоднократные дальние походы самодельных вездеходов по Заполярью и многолетний опыт эксплуатации их любителями, пневматики низкого давления обладают удовлетворительной надежностью и долговечностью и являются перспективным движителем для бездорожья. Если за их создание возьмется промышленность и разработает пневмокамеры с усиленной беговой дорожкой, то надежность и долговечность таких шин может существенно повыситься.
Важная составная часть ходовой системы вездехода — подвеска. Она передает на колеса и колесные пары вес подрессоренной части машины — остова с установленным на нем оборудованием, водителем, пассажирами и грузом. А от колес и колесных пар на остов — продольные и боковые усилия, возникающие при взаимодействии ходовых органов с дорогой; смягчает толчки и удары, воспринимаемые колесами и колесными парами от неровностей дороги; обеспечивает быстрое затухание колебаний подрессоренной части машины. Для выполнения этих функций подвеска снабжена упругими элементами, гасителями колебаний и направляющими устройствами.
В качестве упругих элементов подвески на автомобилях-вездеходах могут применяться листовые рессоры, пружины, торсионы. Для гашения колебаний можно использовать фрикционные и гидравлические демпферы (амортизаторы). Однако на многих самодельных вездеходах упругие элементы в подвеске отсутствуют, так как пневматики низкого давления оказались неплохими амортизаторами.
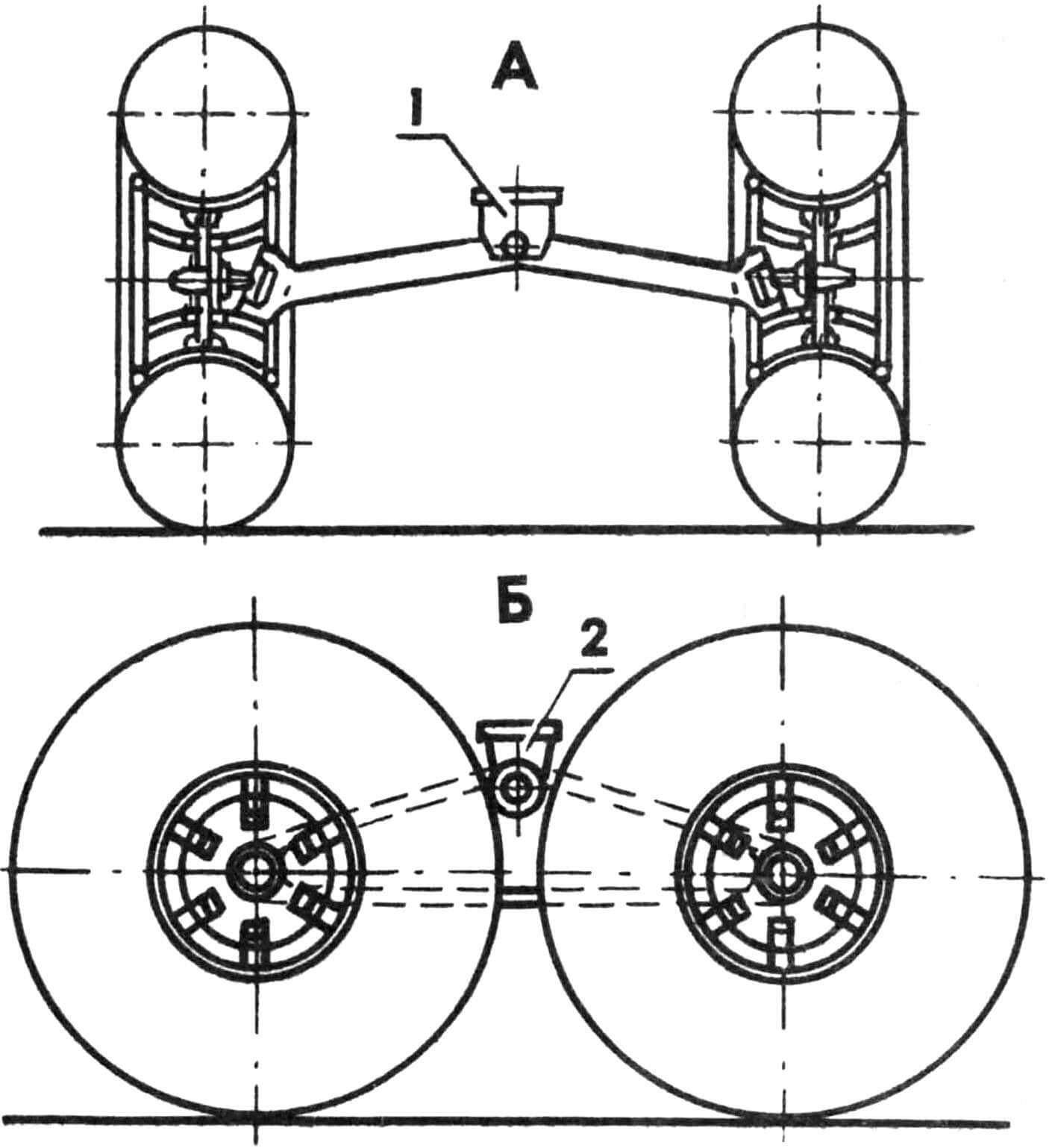
1 — продольно-горизонтальный шарнир, 2 — поперечно-горизонтальный шарнир.
При отказе от упругих элементов становится обязательным применение (в четырех- и шестиколесных ходовых системах) балансиров — качающихся относительно остова рычагов, объединяющих колеса в параллельные или последовательные колесные пары и позволяющих колесам копировать неровности пути (рис. 2).
Наиболее комфортные условия для водителя и пассажиров создают подвески с упругими элементами (рис. 3). Их применение дает возможность повысить безотказность и увеличить долговечность (ходимость) вездеходов.
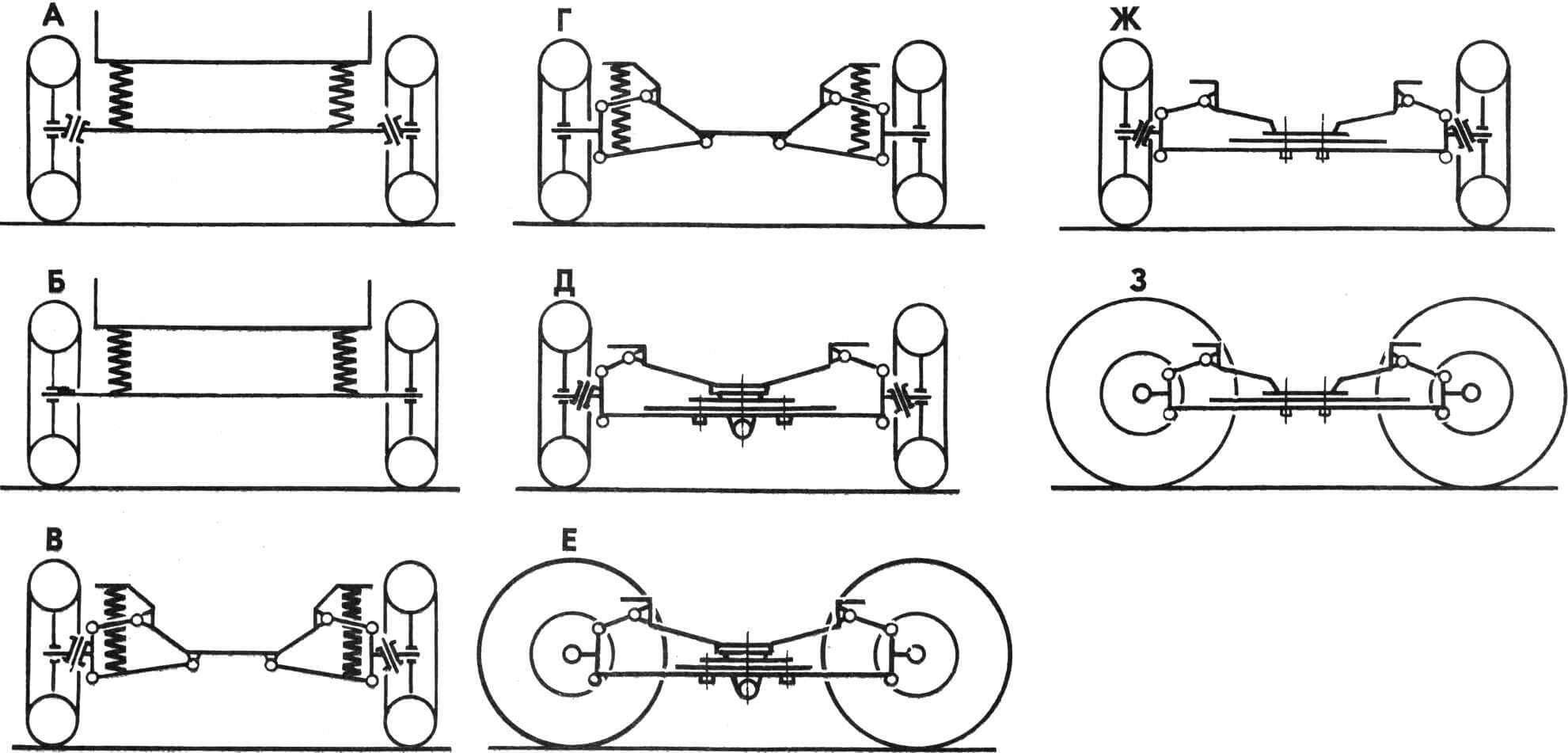
А, Б — пружинные, зависимые, В, Г — пружинные, независимые, Д, Е — рессорные, зависимые, Ж, З — рессорные, независимые (А, В, Д, Ж — управляемые колесные пары и колеса; Б, Г, Е, З — неуправляемые колесные пары и колеса).
Направляющими устройствами в подвесках вездеходов могут служить: листовые рессоры, являющиеся не только- упругими, но и направляющими элементами; рычаги, качающиеся в поперечной или продольной плоскости; телескопические и другие механизмы.
Подвески вездеходов можно разделить на следующие виды: групповые (зависимые), у которых перемещение одного колеса передается другому колесу, связанному с ним осью, балкой моста или балансиром; индивидуальные (независимые) , у которых такое взаимодействие между колесами отсутствует, и смешанные. Наилучшие по плавности хода результаты может дать независимая подвеска, однако она наиболее сложна по конструкции.
Параметры подвески вездехода подбираются с таким расчетом, чтобы его подрессоренная часть совершала колебания с привычной для человека частотой, свойственной нормальной ходьбе (0,8…1,2 Гц). Свободные колебания подрессоренной части вездехода должны быстро затухать (за 2… 3 с). Такие колебания человеческий организм переносит сравнительно легко.
В качестве остова вездехода используют несущее основание кузова, раму (или совместно раму и кузов). Остов должен обладать достаточной жесткостью, чтобы под действием нагрузок, возникающих при движении машины, относительное расположение укрепленных на нем механизмов оставалось практически неизменным.
Несущий кузов позволяет несколько уменьшить массу машины. Однако при раздельном выполнении рамы и кузова создается возможность получить ряд существенных преимуществ: упростить конструкцию кузова, снизить уровень внутреннего шума за счет упругих подушек в местах крепления кузова на раме; упростить сборку и разборку вездехода, замену изношенных или поврежденных узлов и деталей.
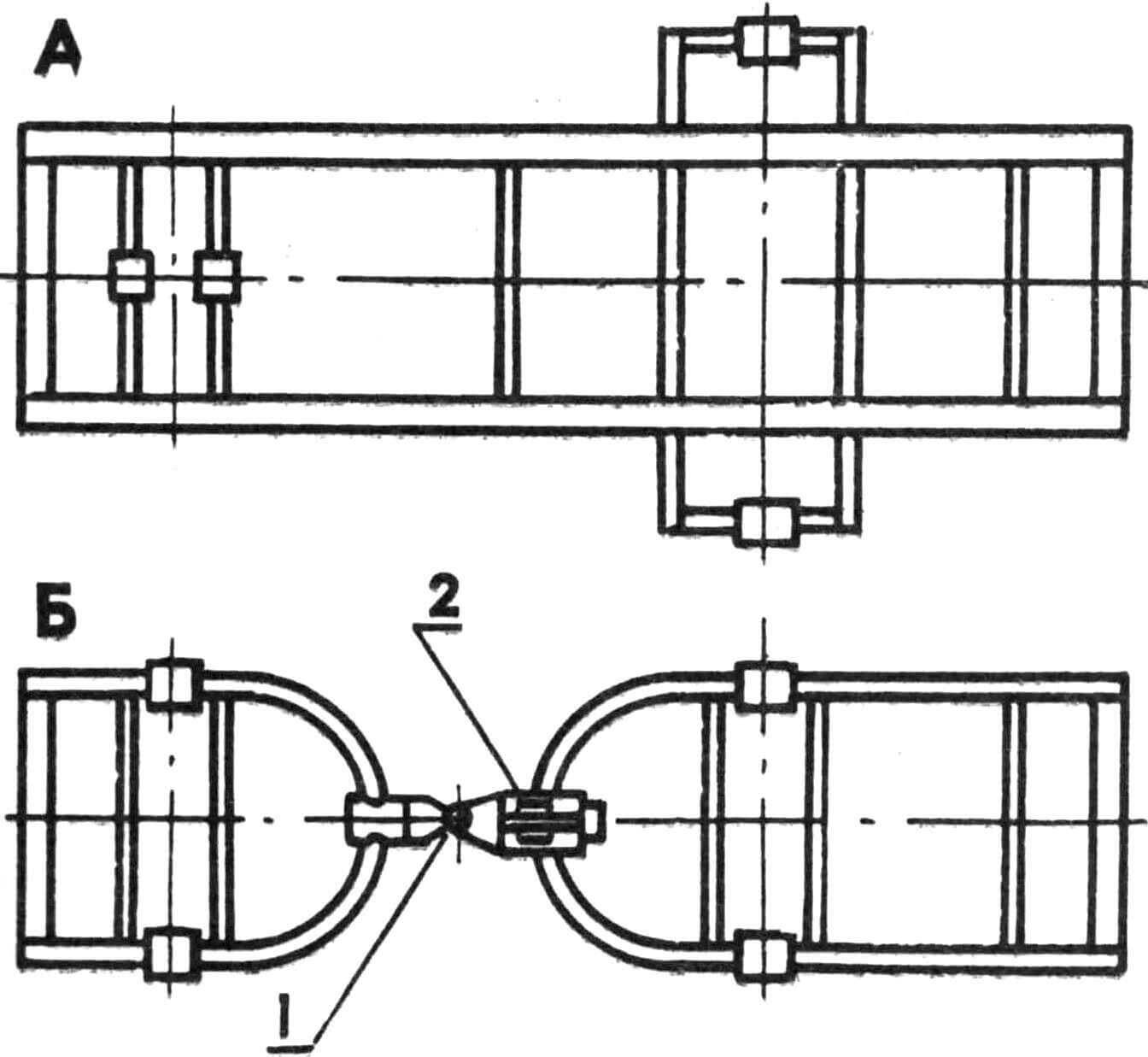
1 — вертикальный шарнир, 2 — горизонтальный шарнир.
Автомобили-вездеходы бывают одно- и двухсекционными, что предопределяется конструкцией их рамы: на односекционных (моноблочных) машинах применяются сплошные, а на двухсекционных (двухблочных) — шарнирные (шарнирно сочлененные) рамы (рис. 4). Сплошные рамы вездеходов (рис. 4а) аналогичны по конструкции рамам обычных легковых автомобилей, шарнирные (рис. 4б) — имеют много общего с рамами шарнирно сочлененных тракторов.
Шарнирная рама состоит из двух полурам, соединенных между собой вертикальным и горизонтальным (продольно-горизонтальным) шарнирами. Такая конструкция позволяет полурамам поворачиваться одна относительно другой в горизонтальной и вертикальной плоскостях.
Вертикальный шарнир служит для изменения направления движения машины. Горизонтальный шарнир позволяет машине приспосабливаться к рельефу дороги.
Принципиальным недостатком двухсекционной машины является повышенная склонность к боковому опрокидыванию из-за наличия продольно-горизонтального шарнира. Однако применение в конструкции рамы упругого элемента, который препятствовал бы повороту полурам относительно друг друга и имел нелинейную (с прогрессивно увеличивающейся жесткостью) характеристику, склонность такой машины к боковому опрокидыванию существенно уменьшилась бы.
СИСТЕМА УПРАВЛЕНИЯ
Среди составных частей вездехода особое место занимают тормозная и рулевая системы, содержащие приводы и механизмы тормозного и рулевого управления. От качества и надежности работы этих систем в значительной мере зависит безопасность движения вездехода. Они дают возможность водителю плавно и резко снижать скорость машины вплоть до полной остановки; держать машину неограниченное время в неподвижном состоянии как на горизонтальной поверхности, так и на уклонах; задавать машине прямолинейное направление движения; выполнять плавные и крутые повороты.
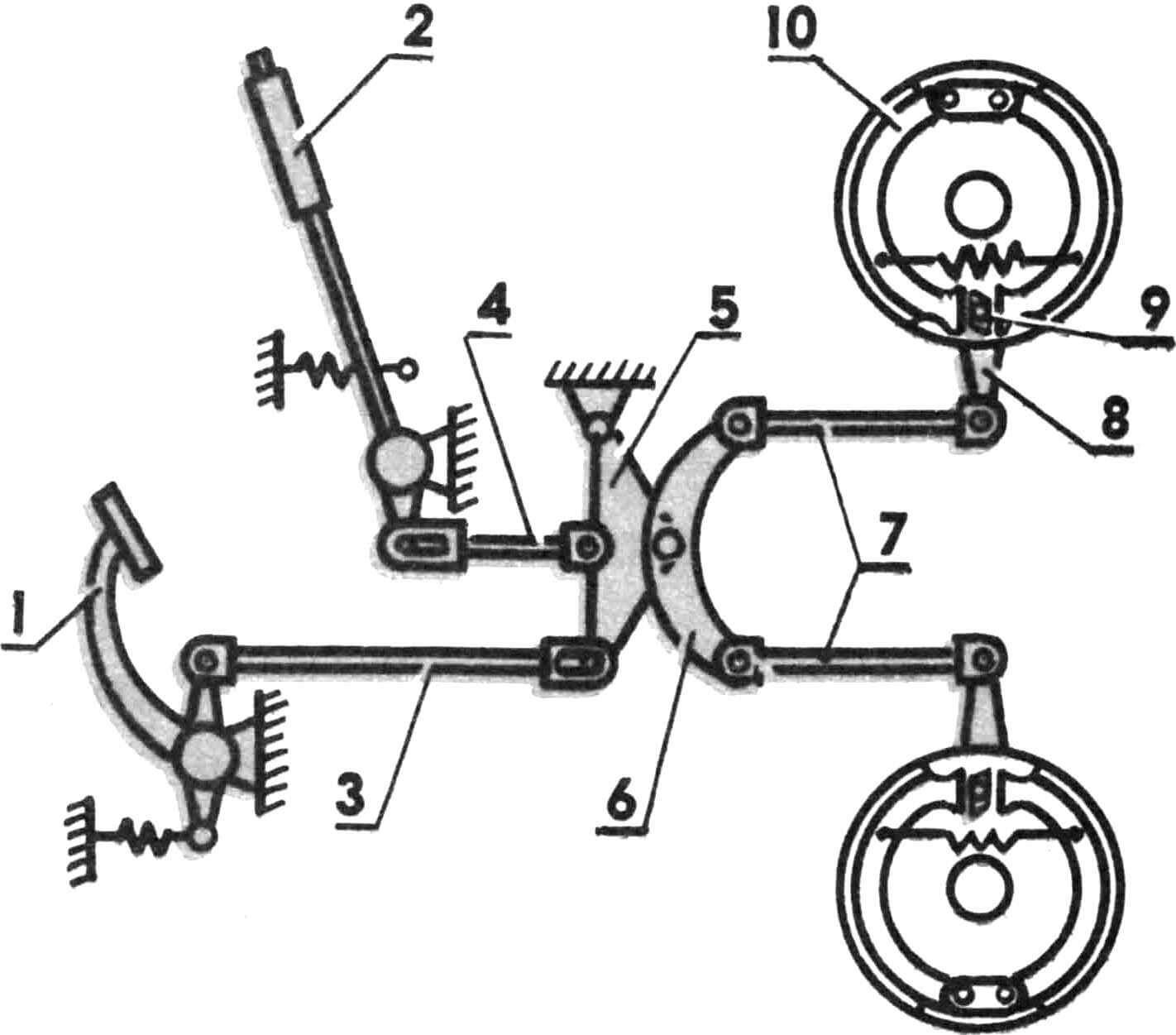
1 — тормозная педаль, 2 — тормозная рукоятка, 3, 4 — центральные тяги, 5 — промежуточный рычаг, 6 — уравнительное коромысло, 7 — бортовые тяги, 8 — рычаг разжимного кулака, 9 — разжимной кулак, 10 — тормозная колодка.
На автомобиле-вездеходе должны быть две независимые тормозные системы: рабочая (с приводом от пеДали) и стояночная, выполняющая также роль запасной (с приводом от рычага). Тормозные механизмы могут быть общими для рабочей и стояночной системы (рис. 5).
Поворот вездеходов осуществляется двумя способами: изменением положения управляемых колес или изломом (складыванием) шарнирно сочлененной рамы. Чаще для поворота пневмохода используют систему рулевого управления, воздействующую на передние управляемые колеса (рис. 6).
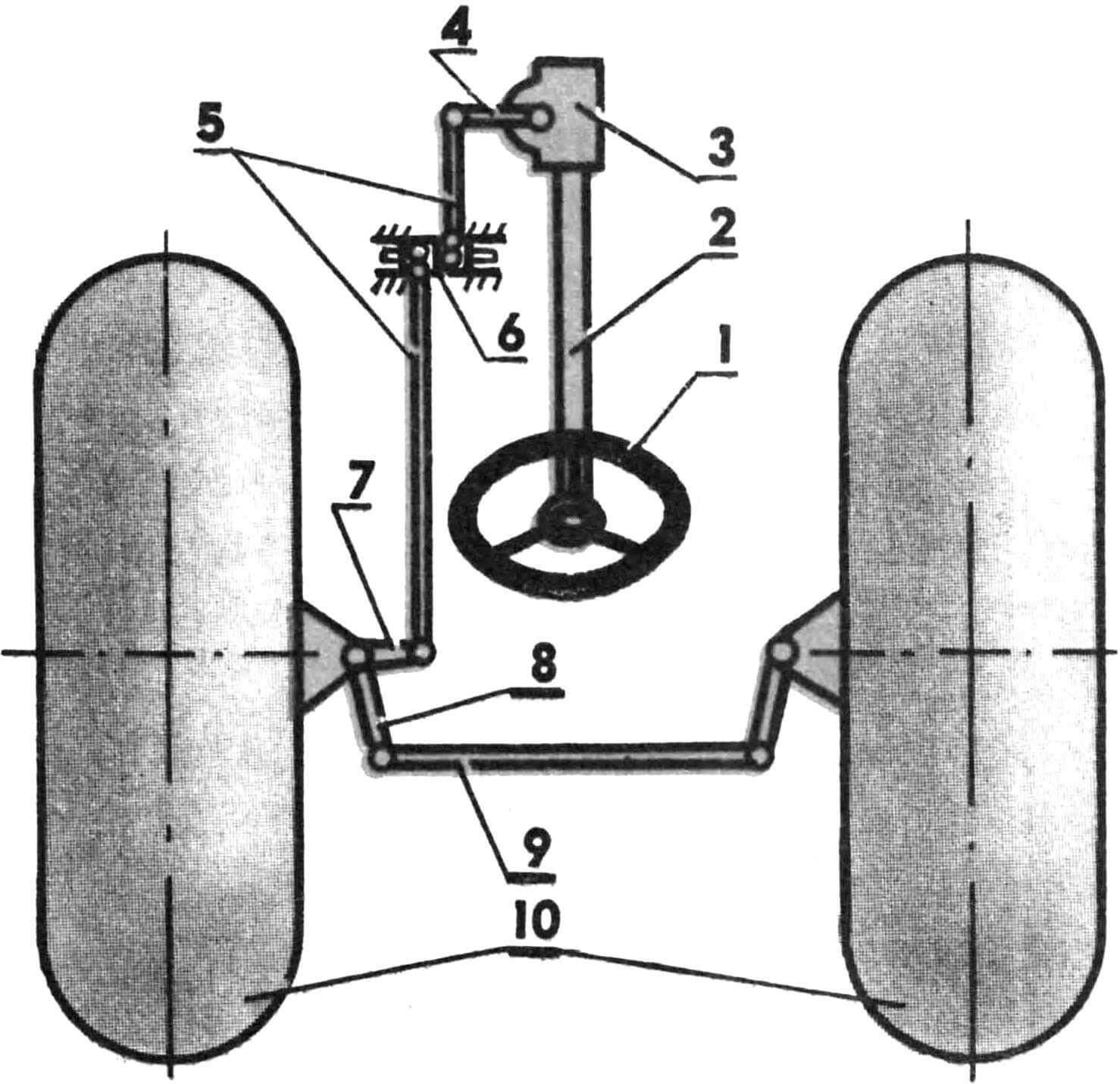
1 — рулевое колесо, 2 — рулевой вал, 3 — рулевой механизм, 4 — рулевая сошка, 5 — продольные тяги, 6 — переходной мостик, 7 — рычаг поворотной цапфы, 8 — рычаг рулевой трапеции, 9 — поперечная тяга, 10 — управляемые колеса.
При повороте автомобиля-вездехода с помощью передних управляемых колес трудно получить малый радиус поворота из-за большого наружного диаметра пневматиков низкого давления. Машины с шарнирной рамой свободны от этого недостатка. Такой же эффект может дать применение на вездеходе одновременно передних и задних управляемых колес.
Некоторые самодеятельные конструкторы для уменьшения радиуса поворота машин с передними управляемыми колесами предусматривают возможность подтормаживания внутренних колес, как это делается на сельскохозяйственных тракторах. В этом случае управление правыми и левыми тормозными механизмами должно быть раздельным (двумя рядом расположенными педалями или рычагами). При одновременном воздействии водителя на обе педали или на оба рычага происходит нормальное торможение машины. Применение ручного управления тормозами при крутых поворотах машины является более предпочтительным: в этом случае исключаются ошибочные действия водителя (при торможениях вездехода рабочей системой).
Для плавных замедлений вездехода и для поддержания безопасной скорости на затяжных спусках необходимо использовать двигатель в качестве тормоза. Его же рекомендуется применять на скользких дорогах — самостоятельно и в сочетании с рабочим тормозом: при этом предотвращаются боковые заносы. Чтобы превратить двигатель в тормоз, достаточно, не выключая сцепление и передачу, отпустить педаль управления дроссельной заслонкой.
Важным эксплуатационным свойством вездехода является его способность сохранять прямолинейность движения без вмешательства водителя (и самостоятельно возвращаться к прямолинейному движению после окончания поворота, а также при случайных отклонениях от прямой под воздействием внешних факторов). Это свойство машины получило наименование стабилизации прямолинейного движения. При плохой стабилизации управление машиной становится утомительным.
Стабилизация прямолинейного движения у самоходных машин, снабженных управляемыми колесами, достигается за счет поперечного наклона оси шкворней поворотных цапф, а у машин с шарнирными рамами — за счет продольного наклона оси вертикального шарнира.
Такие конструктивные решения малоэффективны на вездеходах с пневматиками низкого давления, имеющими большую площадь контакта с дорогой. Задача стабилизации движения вездеходов может быть решена при помощи упругих элементов, возвращающих управляемые колеса или шарнирную раму в нейтральное положение.
ЧАСТЬ V. ДИЗАЙН
Следует, видимо, напомнить, что под дизайном сегодня понимают художественное конструирование, целью которого является создание красивых, удобных в эксплуатации изделий, полезных для человека и общества, а также результаты творческой деятельности художников-конструкторов (дизайнеров).
Главное отличие вездеходов состоит в том, что на них применяются колеса с шинами увеличенных габаритов. К тому же такие машины предназначены преимущественно для использования в условиях тундры, лесотундры и им подобных, где возможно эксплуатировать транспортные средства, лишь снабженные закрытыми кабинами. Снегоболотоходы должны также обладать способностью преодолевать вброд или вплавь водные преграды.
К главным вопросам, требующим решения при художественном конструировании вездехода, относятся: обеспечение удобства эксплуатации и достижение эстетической выразительности машины.
Общие вопросы, связанные с созданием оптимальных условий и необходимых удобств для человека, выполняющего трудовые- функции (например, управляющего транспортным средством), изучает и разрабатывает наука, получившая название эргономики. Эргономические требования к машине разрабатываются на основе результатов исследования деятельности человека-оператора в системе «человек — машина — среда». В их структуру входят: соответствие машины, формы и размеров элементов ее конструкции антропометрическим показателям человека; соответствие машины физиологическим, психофизиологическим и психологическим показателям человека-оператора, его физическим, зрительным, слуховым возможностям, практическим навыкам; соответствие среды, в которой находится оператор, гигиеническим нормам по уровню температуры, влажности, запыленности и загазованности воздуха, шума, вибрации, освещенности.
Требованиям эргономики должно прежде всего удовлетворять рабочее место водителя: сиденье, органы управления машиной, контрольно-измерительные приборы, средства обзорности, устройства для защиты водителя от неблагоприятных воздействий среды. Должно быть уделено внимание и созданию необходимых удобств для пассажиров.
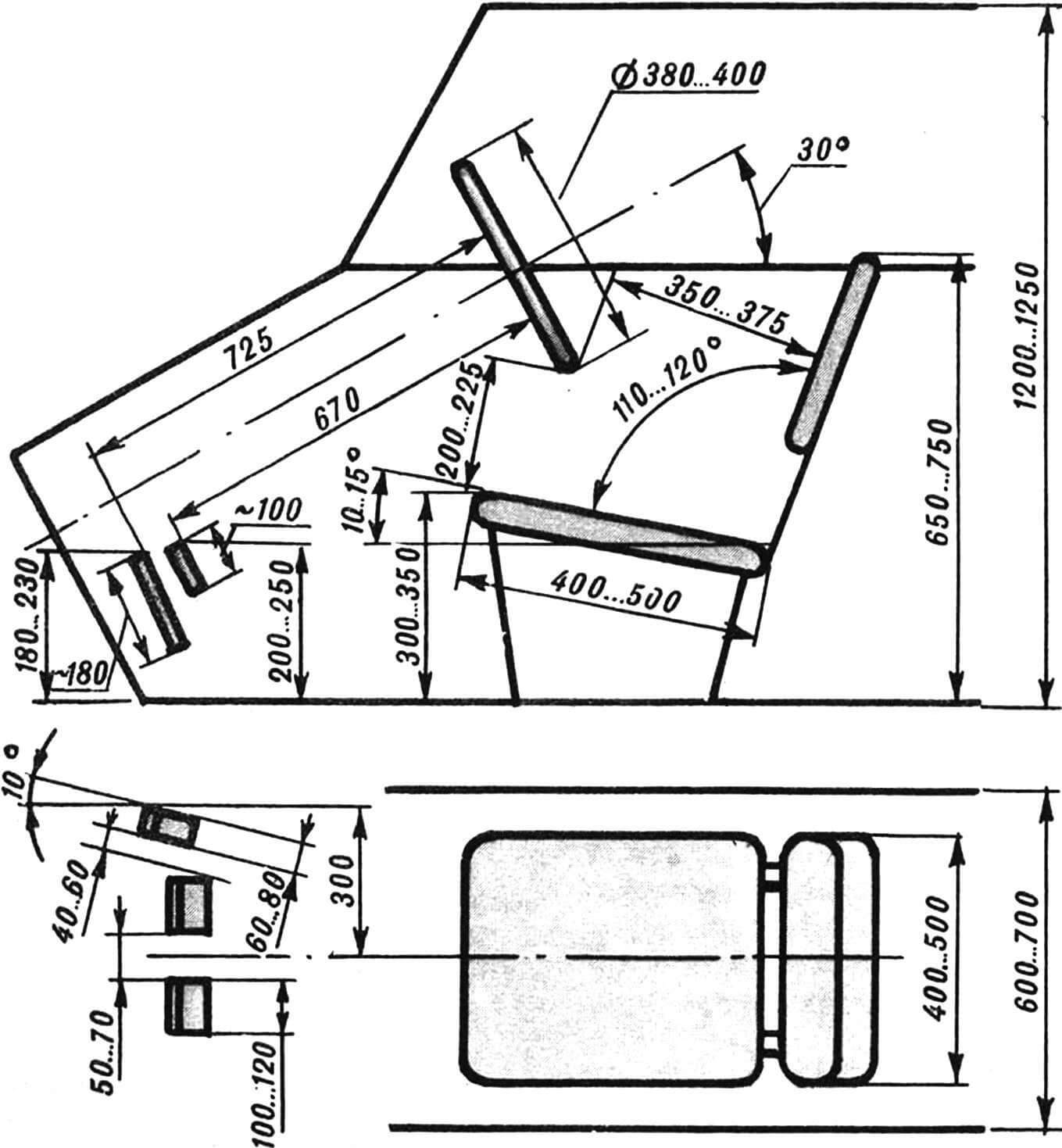
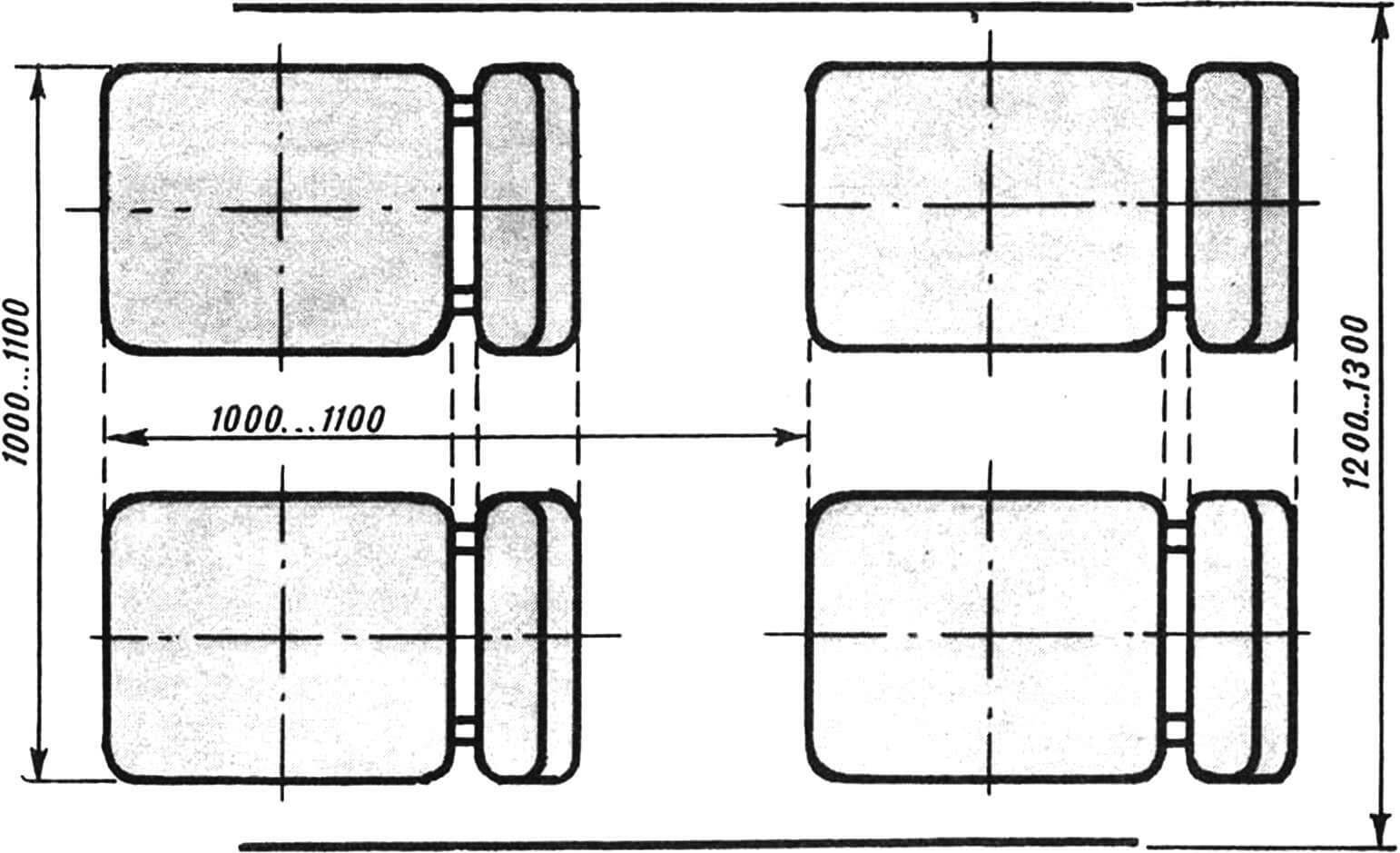
Расположение сидений, их размерные параметры определяются при компоновке машины с использованием схематических изображений «стандартного» человека, шаблонов и манекенов. Основные данные, необходимые для проектирования мест для водителя и пассажиров в авто-мобиле-вездеходе, снабженном закрытой кабиной, приведены на рисунках 1 и 2.
Органы ручного и ножного управления машиной должны располагаться в зонах досягаемости соответственно рук и ног водителя и по возможности в поле его зрения. Перемещения органов управления должны согласовываться с естественными направлениями движения рук и ног водителя, а также соответствовать задаваемому изменению курса (например, вращение рулевого колеса вправо приводит к правому повороту, а влево — к левому повороту машины). Усилия на органах управления должны изменяться в согласии с поведением объекта (например, усилие на педали тормоза должно ассоциироваться с усилием торможения машины). Если эти требования выполнены, то водитель «чувствует» машину.
Большое значение для водителя имеет информация о режимах движения машины и работы отдельных ее узлов и систем, даваемая средствами индикации — указателями и сигнализаторами. Конструктивно они оформляются в виде панели контрольно-измерительных приборов, размещаемой на передней стенке кабины, или в виде блока приборов, монтируемого на рулевой колонке. Число приборов должно быть минимально необходимым, а даваемая ими информация — легко воспринимаемой водителем.
К характерным органам управления автомобилем относятся: замок зажигания; рулевое колесо; педали акселератора, сцепления, рабочего (ножного) тормоза; рычаги стояночного (ручного) тормоза, декомпрессора, топливного корректора, коробки передач, реверс-редуктора, механического пускового устройства двигателя (кикстартера); тумблеры, кнопки электростартера, звукового сигнала, указателя поворота, переключателя света фар, центрального переключателя света. В состав контрольно-измерительных приборов автомобиля и сигнализаторов входят: спидометр со счетчиком пройденного пути; амперметр-вольтметр; указатель уровня топлива в баке; контрольные лампы указателя включения электросистемы, указателя поворотов, указателя нейтрального положения рычага переключения передач, указателя включения отопителя.
Органы управления подразделяются на те, что используются постоянно, часто и редко. Усилия на постоянно используемых органах управления (педали акселератора, рулевом колесе) не должны превышать 3 кгс; на часто используемых (педали муфты сцепления, рычаге коробки передач, педали тормоза при плавных торможениях) — 6 кгс и на редко используемых (педали тормоза при экстренных торможениях) — 12 кгс. При более высоких усилиях вождение машины становится утомительным.
Эстетические и технические проблемы, возникающие при создании предметов, совместно изучает и решает наука, получившая наименование технической эстетики.
Эстетичность — обобщенное требование к изделию. В его структуру входят частные требования, которые конкретизируются для изделий определенного типа и назначения. Эстетические требования базируются как на чисто эстетических свойствах, исходящих из закономерностей формообразования, так и на потребительских свойствах, основанных на внутренней структурно-функциональной сущности предметов.
Форма вездехода, отвечающего требованиям технической эстетики, должна соответствовать его функциональному назначению, быть информативной, композиционно совершенной, гармоничной.
Информативность формы требует наличия в ней таких признаков, которые позволяют видеть в изделии его назначение, тип, возможные варианты функционирования: вездеход должен выглядеть вездеходом. В общем облике такой машины выделяются ходовые органы (колеса с пневматиками низкого давления), выражающие тяговую мощь и проходимость машины по бездорожью. Их главенствующая роль должна активно поддерживаться всеми остальными формообразующими элементами машины.
Под композицией понимают строение, соотношение и взаимосвязь частей и целого в объемно-пространственной структуре объекта. В основе композиции лежат две идеи; первая (главная) выражает эстетическую закономерность построения — архитектуру формы предмета; вторая — конструктивную основу (тектонику) формы.
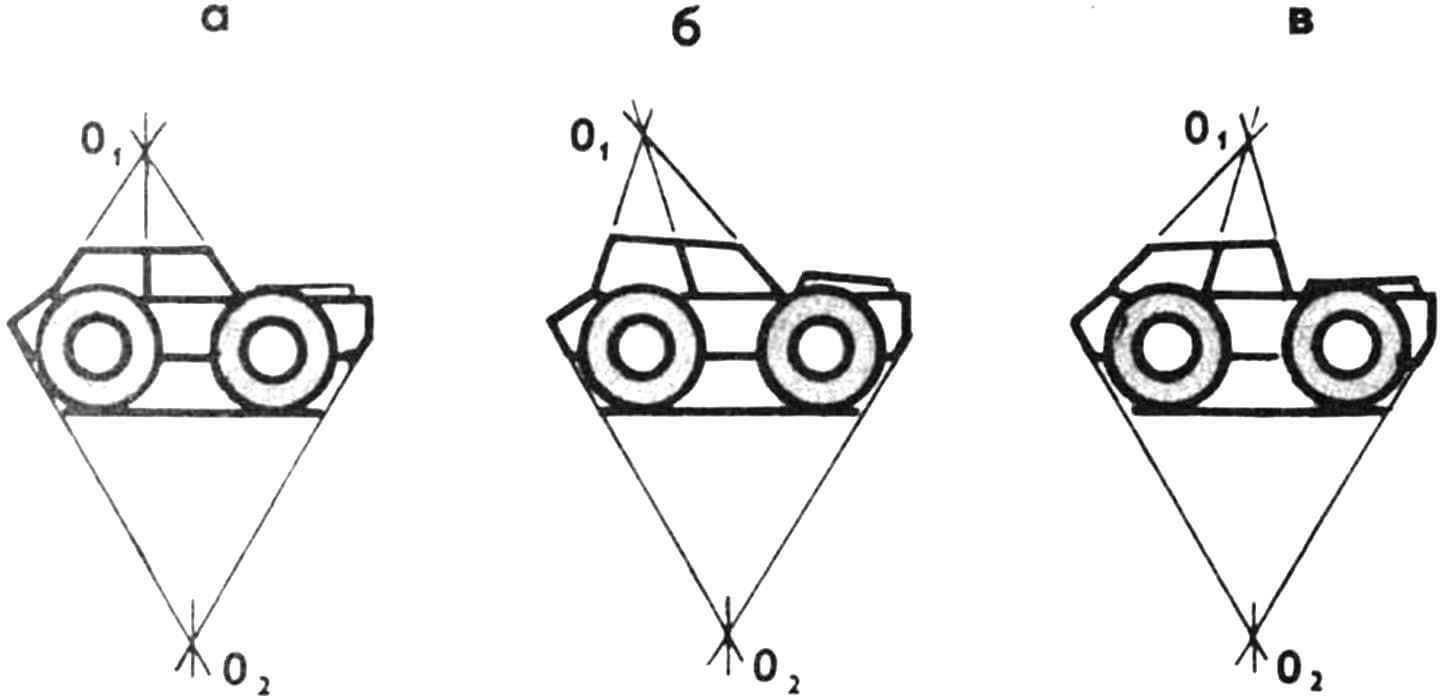
а — уравновешенная композиционная схема; б — схема, подчеркивающая тяговую мощь машины; в — схема, подчеркивающая скоростные возможности машины.
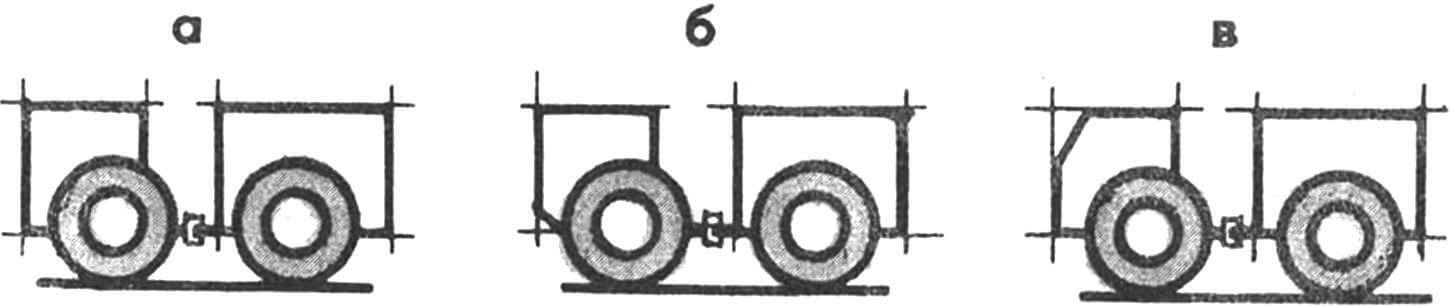
Упорядочение элементов формы вездехода, создающее впечатление целостности, завершенности конструкции машины, может быть достигнуто двумя основными приемами: построением компоновочной схемы из одного или двух центров композиции (рис. 3) и построением компоновочной схемы на одинарной или двойной сетке, образованной пересекающимися (под прямым или косым углом) линиями (рис. 4). Изменяя положение центра (или центров) композиции, выделяя некоторые элементы формы, вводя дополнительные скосы, можно зрительно усилить те или иные эксплуатационные особенности вездехода: его тяговую мощь, скоростные возможности и прочее. Композиция, построенная на сетке, позволяет обратить внимание на увеличенную пассажиро- и грузовместимость вездехода. Угловатые формы машины делают ее композицию жесткой, скругленные — пластичной.
Под гармоничностью формы подразумевают пропорциональность основных размеров объекта и его составных частей, обеспечивающую зрительное восприятие объекта как единого целого.
При проектировании изделий простой формы удается получить для всех сопоставляемых размеров постоянную или близкую к постоянной величину коэффициента пропорциональности. Часто его принимают равным 0,618, что соответствует отношению размеров человеческого тела и «золотого сечения», получаемого геометрическим построением. У объектов сложной формы величина коэффициента К пропорциональности размеров изменяется в определенных, сравнительно узких для каждого типа изделий пределах. При художественном конструировании автомобилей-вездеходов на пневматиках низкого давления можно принять К≈0,4… 0,6.
В качестве примеров на рисунках 5 и 6 показаны композиционные схемы двух-и трехосного автомобилей-вездеходов. Числовые значения коэффициента пропорциональности их размеров находятся в рекомендуемом интервале:
Здесь: Lгаб, Вгаб, Нгаб — габаритные размеры вездехода (длина, ширина, высота); Lбаз — колесная база; D — наружный диаметр колеса; Х1 и Х2, У1 и У2 — координаты точки О, принадлежащей наибольшим сечениям машины по вертикали и горизонтали.
В самодеятельном творчестве конструкторов, создающих вездеходы на пневматиках низкого давления, начинают складываться определенные технические направления: «архангельское», «надымское», «минское» и другие. Это является основанием для постановки вопроса о целесообразности группового художественного конструирования вездеходов, стилизации их формы. Носителями стиля являются линии, образующие контур (силуэт) предмета и его основополагающих частей (рис. 5 и 6). Воплощение единого эстетического образа во всей создаваемой группе машин позволяет зрительно выделять их из множества машин одинакового назначения.
Овладение приемами и методами художественного конструирования позволит самодеятельным конструкторам создавать машины, отвечающие требованиям эргономики и технической эстетики. Художественное конструирование должно стать органической составной частью общего процесса проектирования перспективных вездеходов. Любительские вездеходы по показателям основных потребительских свойств, в том числе эргономических и эстетических, должны подойти вплотную к машинам промышленного производства, разрабатываемым профессиональными конструкторами и дизайнерами.
В. ШАЛЯГИН, кандидат технических наук
Рекомендуем почитать
 МОДЕЛИСТ-КОНСТРУКТОР 1997-01
МОДЕЛИСТ-КОНСТРУКТОР 1997-01
В НОМЕРЕ: Общественное КБ: Н.Васильев. «Алезонник» из Чебоксар (2). Малая механизация: В.Радьков. Лебедка: пахарь, корчевщик и... сапер (5); В.Баранов. Будет мотоблоку магнето (7).... «ТРЕНОГА» ДЛЯ ЦВЕТОВ
«ТРЕНОГА» ДЛЯ ЦВЕТОВ
Большинство людей, особенно женщины, любят украшать свое жилище комнатными цветами. Но для их размещения используют в основном подоконники. Хотя для многих видов растений это место не...