 (Окончание. Начало см. в № 9—11)
(Окончание. Начало см. в № 9—11)
РУЛЕВЫЕ МАШИНКИ
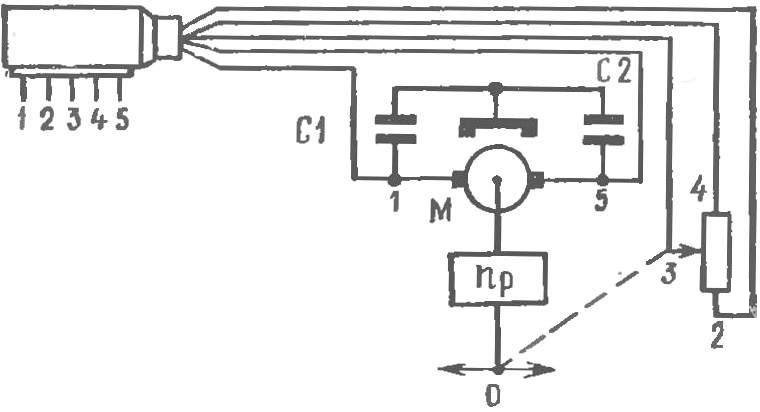
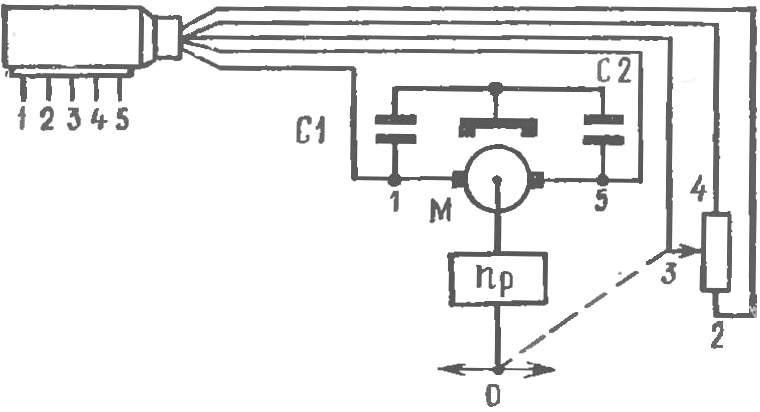
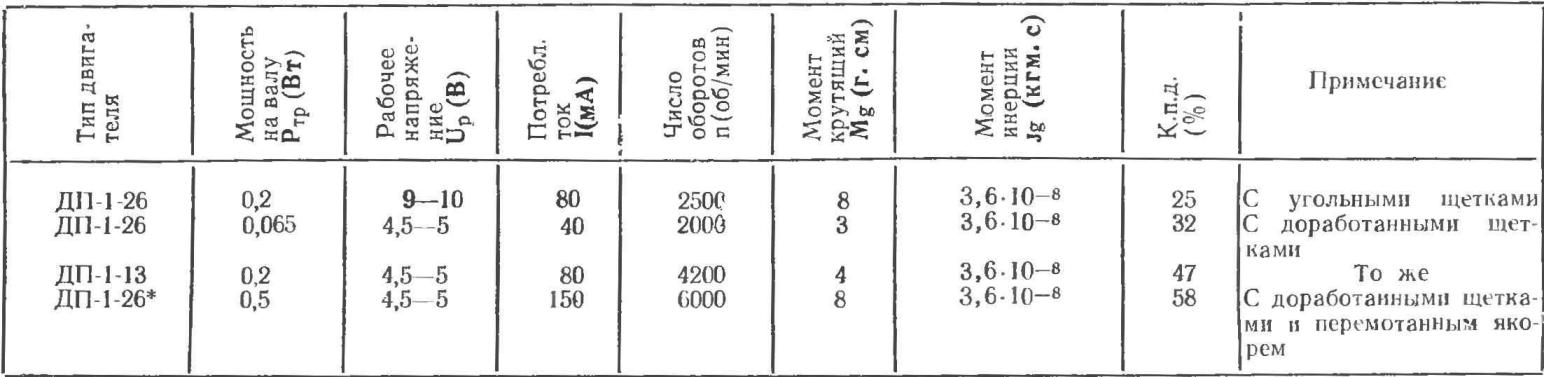
В системе «Радиопроп» применены электродвигатели постоянного тока с независимым возбуждением (с постоянными магнитами) типа ДП-1-26, ДП-1-13 с доработанными щетками и ДП-1-26 *, перемотанный на рабочее напряжение 4,5—5 В. Замена угольных щеток на металлические, сделанные из тонких проволочек, дает возможность улучшить характеристики двигателей: уменьшить статический момент сопротивления, ПОВЫСИТЬ К.П.Д. и т. д. Электрическая схема исполнительного механизма — на рисунке 1.
Основные параметры двигателей представлены в таблице 1, а их рабочие характеристики — на рисунках 2—5.
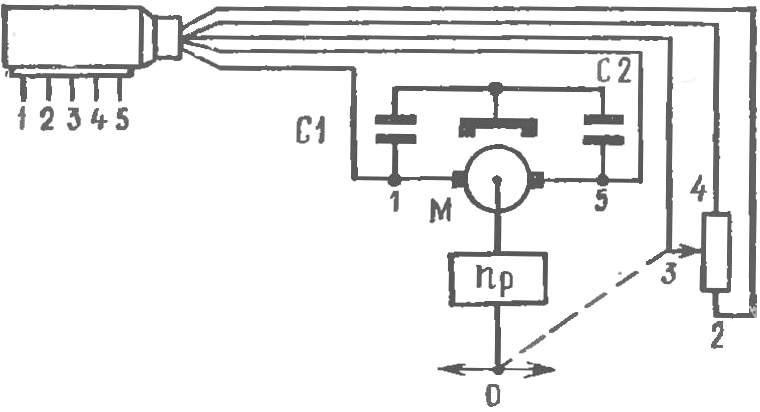
Рис. 1. Электрическая схема рулевой машинки.
Серводвигатель и передаточное отношение редуктора выбирают из условия передачи необходимой мощности нагрузке (под нагрузкой подразумеваются усилия, необходимые для привода рулей поворота и высоты, элеронов, механизма выпуска и уборки шасси, для управления режимом двигателя).
ТАБЛИЦА 1

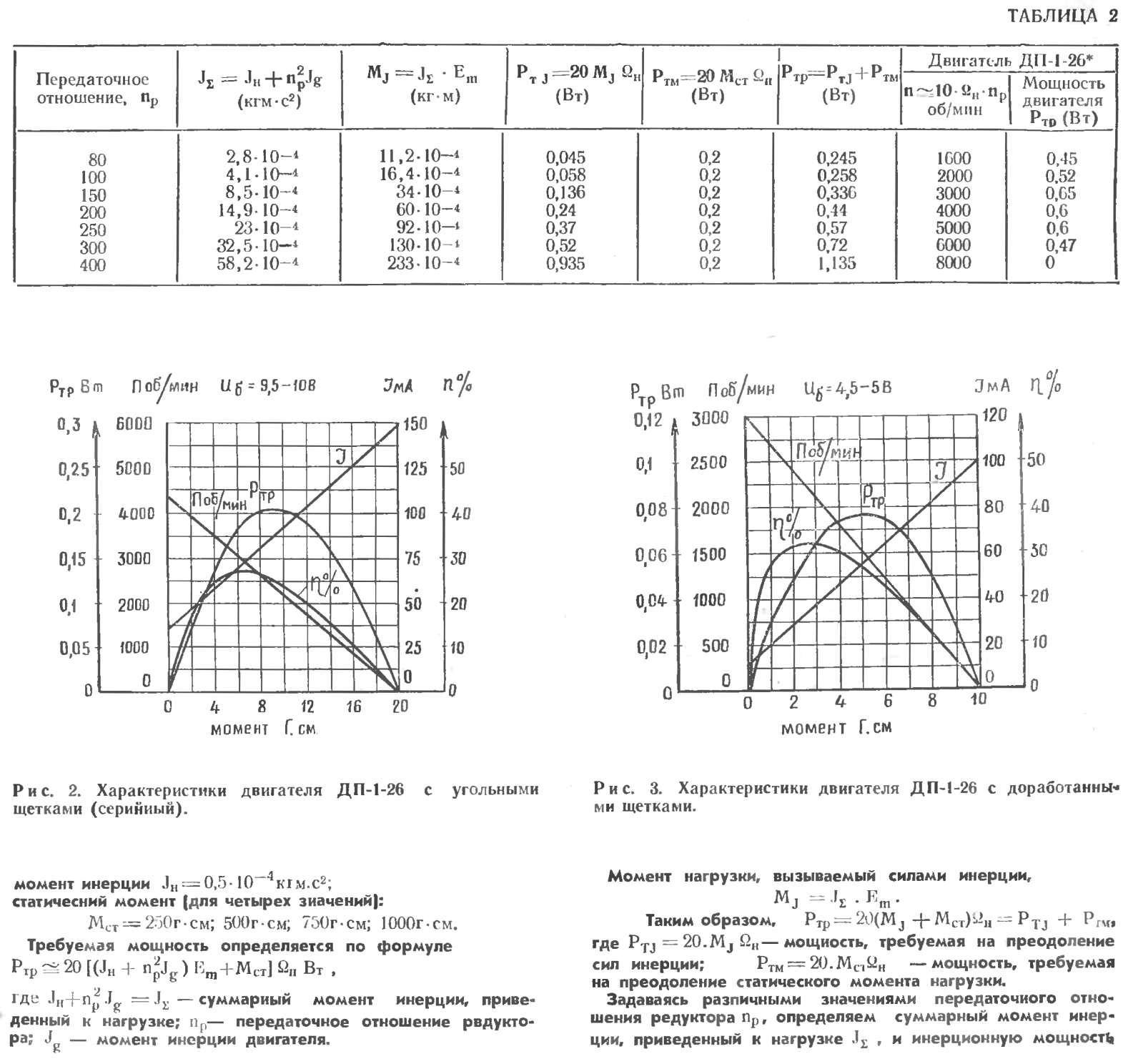
PTJ. Мощность выбранного типа двигателя и полная мощность нагрузки Pгр определяется в зависимости от передаточного отношения редуктора по таблице 2, рассчитанной для двигателя ДП-1-26*— при Мст = 500 г·см. Аналогичным образом проведен расчет и для других значений Мст.
Кривые мощностей нагрузки и двигателей ДП-1-26*, ДП-1-13 в зависимости от передаточного отношения редуктора приведены на рисунке 6. Из графика видно, что максимум превышения мощности двигателя ДП-1-26 * над мощностью нагрузки (при Мст = 1000 г·см) находится между 90 и 200. Для двигателя ДП-1-13 максимум превышения мощности над мощностью нагрузки (при М ст= 250 г·см) находится между 60 и 110. Таким образом, любое передаточное отношение редуктора в этих пределах дает достаточный запас мощности для правильного функционирования рулевой машинки, установленной на борту радиоуправляемой модели. Руководствуясь приведенными соображениями, передаточное отношение редуктора выбрано равным np = 136—140, которое, как показали исследования, хорошо согласуется с параметрами сервоусилителя и нагрузкой.
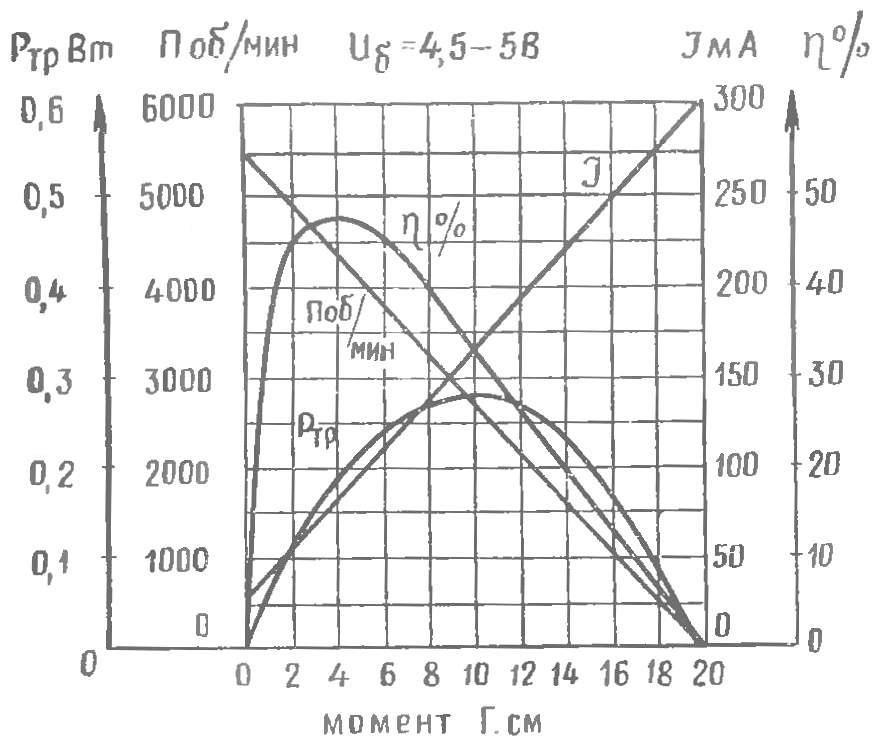
Рис. 4. Характеристики двигателя ДП-1-13 с доработанными щетками.
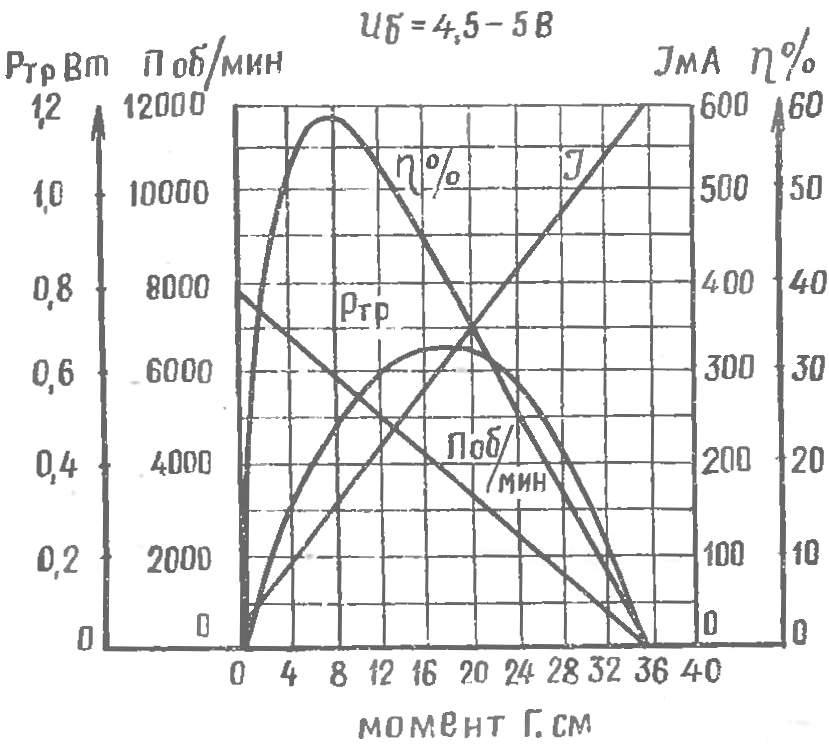
Рис. 5. Характеристики двигателя ДП-1-26* с перемотанным якорем и доработанными щетками.
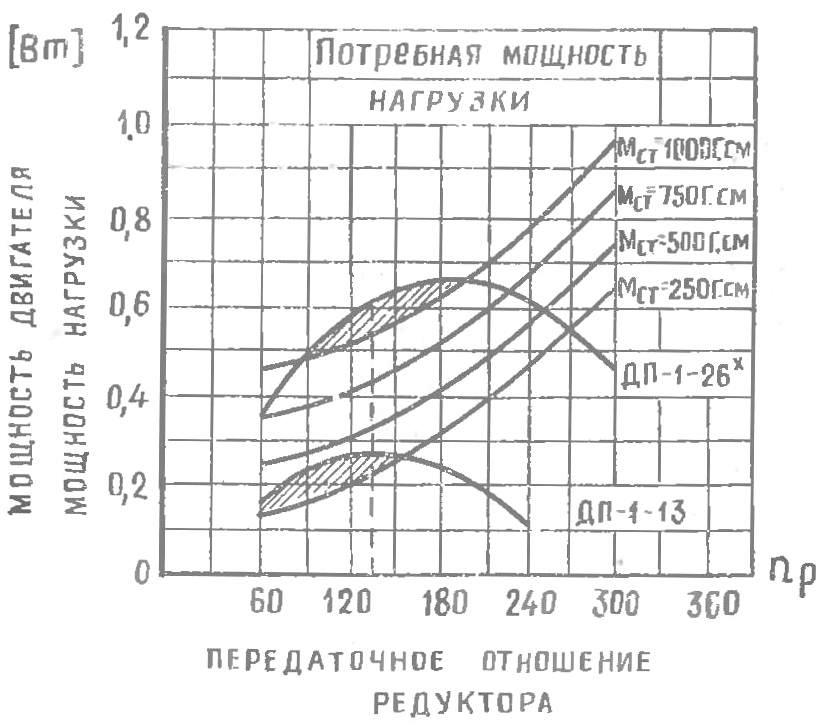
Рис. 6. График для определения оптимального передаточного отношения редуктора.
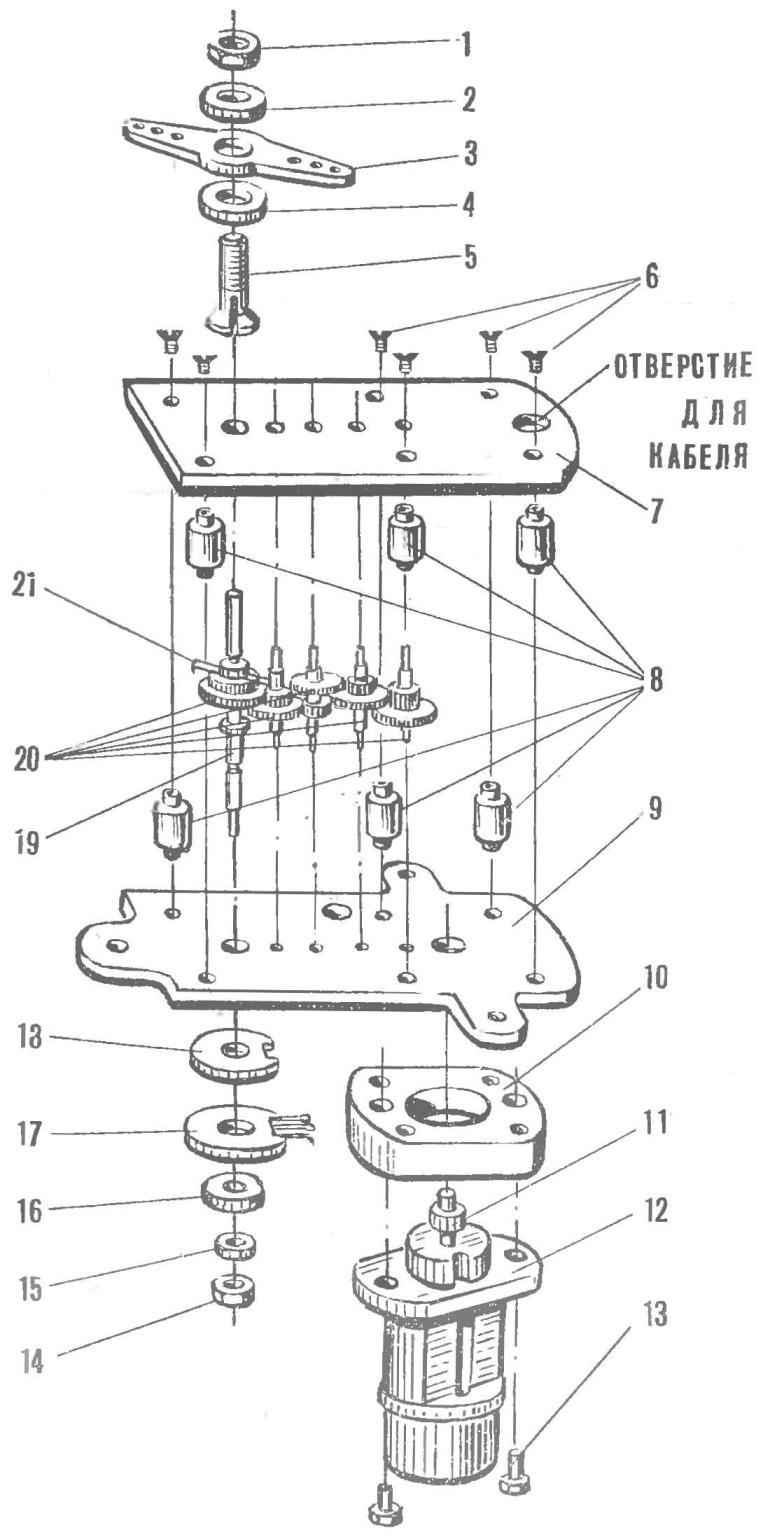
Рис. 7. Устройство рулевой машинки:
1 — гайка (Ст. 45); 2 — шайба (Д16Т); 3 — качалка (текстолит); 4 — шайба (Д16Т); 5 — цанга (Д1СТ); 6 — винт М2,5; 7 плата верхняя (текстолит); 8 — стойка (Д16Т); 9 — плата нижняя (текстолит); 10 — прокладка (текстолит); 11 — ведущая шестерня 12 — электродвигатель; 13 — винт крепления; 14 — гайка; 15 — шайба (латунь); 16 — движок потенциометра; 17 — потенциометр обратной связи: 18 — прокладка (гетинакс); 19 — выходной вал редуктора (Ст. 45), 20 — шестерни редуктора; 21 — ограничитель (Ст. 45).
Устройство рулевой машинки — на рисунке 7. Наладка ее сводится к обеспечению плавности вращения редуктора и потенциометра обратной связи без электродвигателя. При этом особое внимание уделяется надежности контакта движка потенциометра и линейности его сопротивления в зависимости от угла поворота выходного вала редуктора. Затем, после установки электродвигателя, окончательно проверяют плавность хода редуктора.
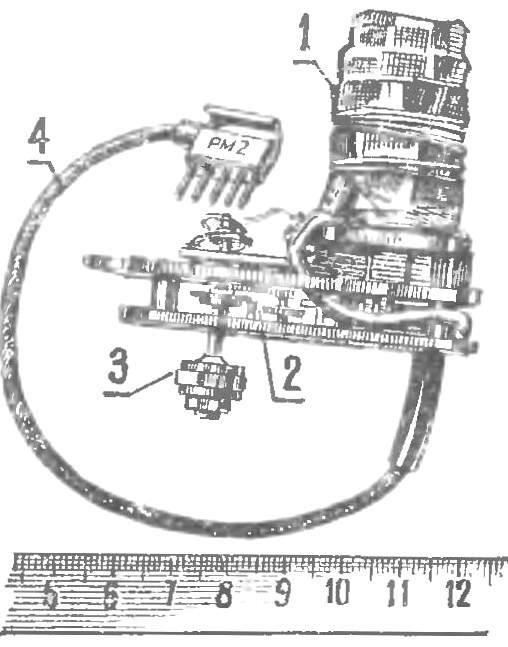
Рис. 8. Внешний вид рулевой машинки:
1 — электродвигатель; 2 — шестерни редуктора; 3 — выходной вал редуктора; 4 — кабель питания с разъемом
Правильно собранная машинка (рис. 8) должна иметь минимальное значение люфта выходного вала. Следует помнить, что рулевые машинки, установленные на борту моделей, подвержены довольно значительным вибрационным перегрузкам. Поэтому к механической прочности и амортизации рулевых машинок предъявляются жесткие требования. Ненадежность контакта в цели обратной связи или якоря электродвигателя в условиях вибрации может стать причиной радиопомех, нарушающих работу радиоприемного устройства.
По вопросам, затронутым в статье, рекомендуем прочитать следующие книги:
1. Веребрюсов И. А., Синхронные передачи и следящие системы. Л., Судпромгиз, 1954.
2. «Техника передачи результатов измерения по радио». Сборник переводов по радиотелеметрии. М., Воениздат, 1955.
3. Трансел Дж. Дж., Справочная книга по технике автоматического регулирования. Перевод с английского. М., «Знание», 1962.
4. Беляев Н. И., Нагорский В. Д., Выбор двигателя и редуктора следящих систем. М., «Машиностроение», 1972.
5. Петров Б. И., Электропривод систем управления летательных аппаратов. М., «Машиностроение». 1973.
Г. ОХОТНИКОВ, г. Жуковский, Московской области
Рекомендуем почитать
 «ОСА»
«ОСА»
Радиоуправляемая модель самолета «Оса» (рис. 1) — одномоторный моноплан с высоко расположенным свободнонесущим крылом, имеющим угол поперечного v —12°. На модели установлен... Программа «Печать»
Программа «Печать»
В качестве печатающего аппарата используется принтер ЕС-7914М. Можно применить аналогичные устройства без изменения программы, если они имеют интерфейс IRPR или DZM-180 или...