Его движения очень напоминают действия человека, который занят соединением каких-либо небольших деталей: автомат поворачивается, что-то берет, поднимает и переносит в точно установленное место, опускает или удерживает на время обработки. Так действует робот-манипулятор, созданный новаторами владимирского завода «Автоприбор» — участниками НТТМ. Молодые конструкторы научили его имитировать двигательные и рабочие функции рук людей, выполняющих определенные операции у конвейера, скажем, в сборочном производстве автомобильных измерительных приборов.
У манипулятора немало конструктивных и эксплуатационных достоинств. Прежде всего — три степени свободы его исполнительных узлов: то есть он может совершать вращение в горизонтальной плоскости, подъем-опускание в вертикальной, а также перемещение вперед-назад штанги с рабочей головкой. При этом робот обеспечивает большую точность выполнения движений — до 0,1 мм. Следует добавить, что все действия совершаются автоматически, по циклам, задаваемым программируемым контролером или кулачковым командоаппаратом, а координатная ориентировка — по упорам.
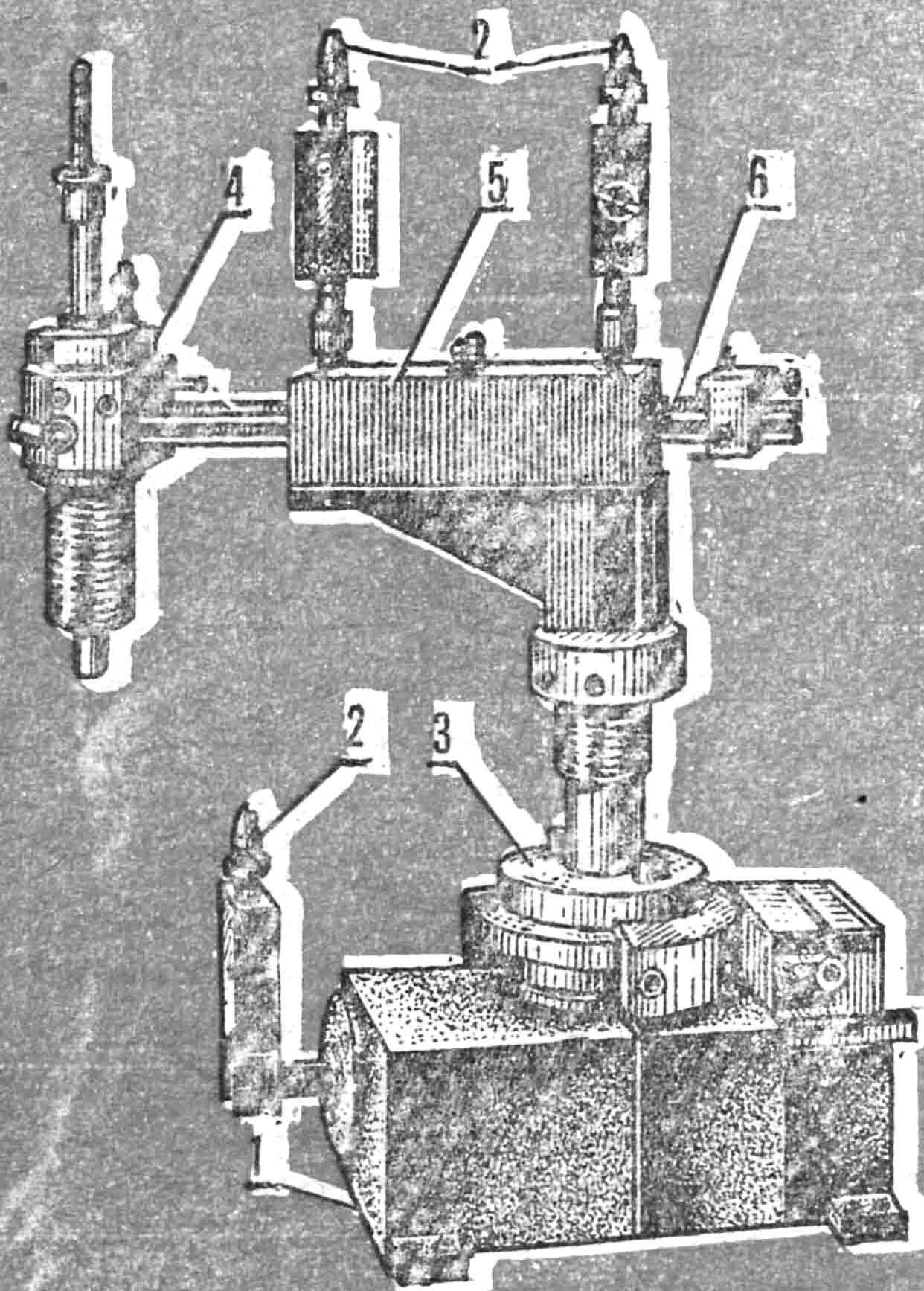
Пневматический манипулятор-автомат:
1 — основание, 2 — штуцеры подключения к пневмосети, 3 — поворотный узел, 4 — узел рабочей головки, 5 — узел штанги, 6 — штанга («рука»).
Манипулятор выполнен в настольном варианте и имеет габариты 186X305X550 мм. Своей металлической рукой он управляется с грузом весом до 0,1 кг, перенося его на миниатюрные же расстояния — до 80 мм по горизонтали и до 60 мм по вертикали, зато молниеносно — за 0,3 с.
Те, кто знакомился с роботом на выставке НТТМ-87, отмечали среди его преимуществ и малый вес (всего 15 кг), и простоту обслуживания, и высокую надежность, и, наоборот, невысокую стоимость. Важно также, что исполнительные узлы могут быть использованы и как самостоятельные модули при создании других приспособлений или автоматических устройств. А благодаря приводу от пневмосети, имеющейся практически на каждом производстве, манипулятор несложно встроить в любой, близкий по роду изделий сборочный конвейер или робототехнический комплекс.
Рекомендуем почитать
 «ЛУКОВЧОНОК» — ШКОЛЬНЫЙ ТРАКТОР
«ЛУКОВЧОНОК» — ШКОЛЬНЫЙ ТРАКТОР
Характерную тенденцию наглядно выявил проходивший летом 1978 года VI Всероссийский слет юных рационализаторов и конструкторов: во многих сельских школах ребята активно занялись... ШАГОХОД «МАРСИАНИН»
ШАГОХОД «МАРСИАНИН»
Согласитесь, что при взгляде на этот снимок вспоминаются иллюстрации к научно-фантастическим романам, рассказывающим об инопришельцах. Конструкция И. Лягушн из поселка Донбассэнерго...