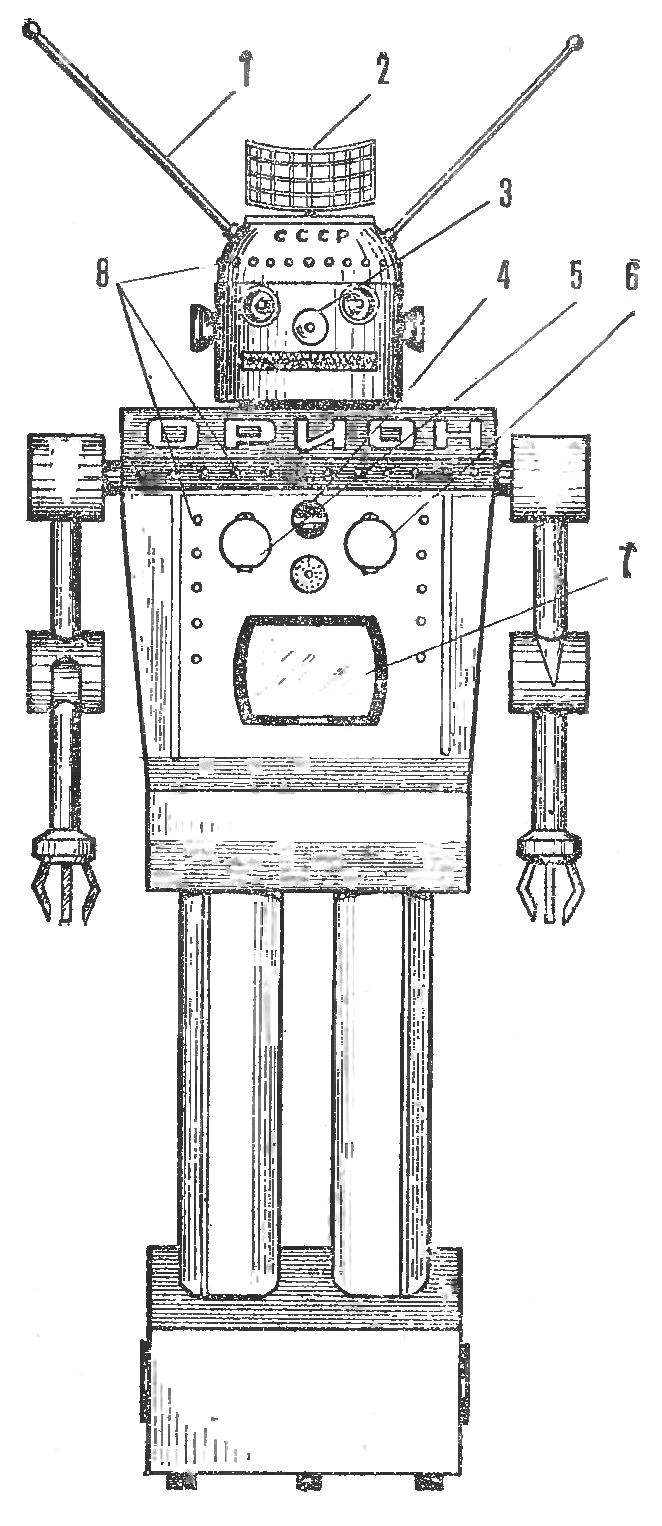
«Голова» насажена непосредственно на вал двигателя ДСДР, имеющего 2 об/мин. Для ограничения хода двигателей установлены микровыключатели МП-1.
Антенна локатора вращается только в одну сторону. Она также установлена на вал двигателя ДСДР.
ЭЛЕКТРИЧЕСКАЯ СХЕМА УНЧ СИСТЕМЫ СВЯЗИ представляет собой трехкаскадный усилитель с двухтактным оконечным каскадом на транзисторах VЗ и V4 (рис. 8). На транзисторе V2 собран фазоинверторный каскад. Связь фазоинверторного каскада с оконечным происходит через согласующий трансформатор Т1.
Предварительный усилитель — обычный резистивный каскад на транзисторе V1. Регулируемая частотно-зависимая обратная связь (R8С5) позволяет установить заданный коэффициент усиления всего усилителя при разбросе параметров элементов схемы.
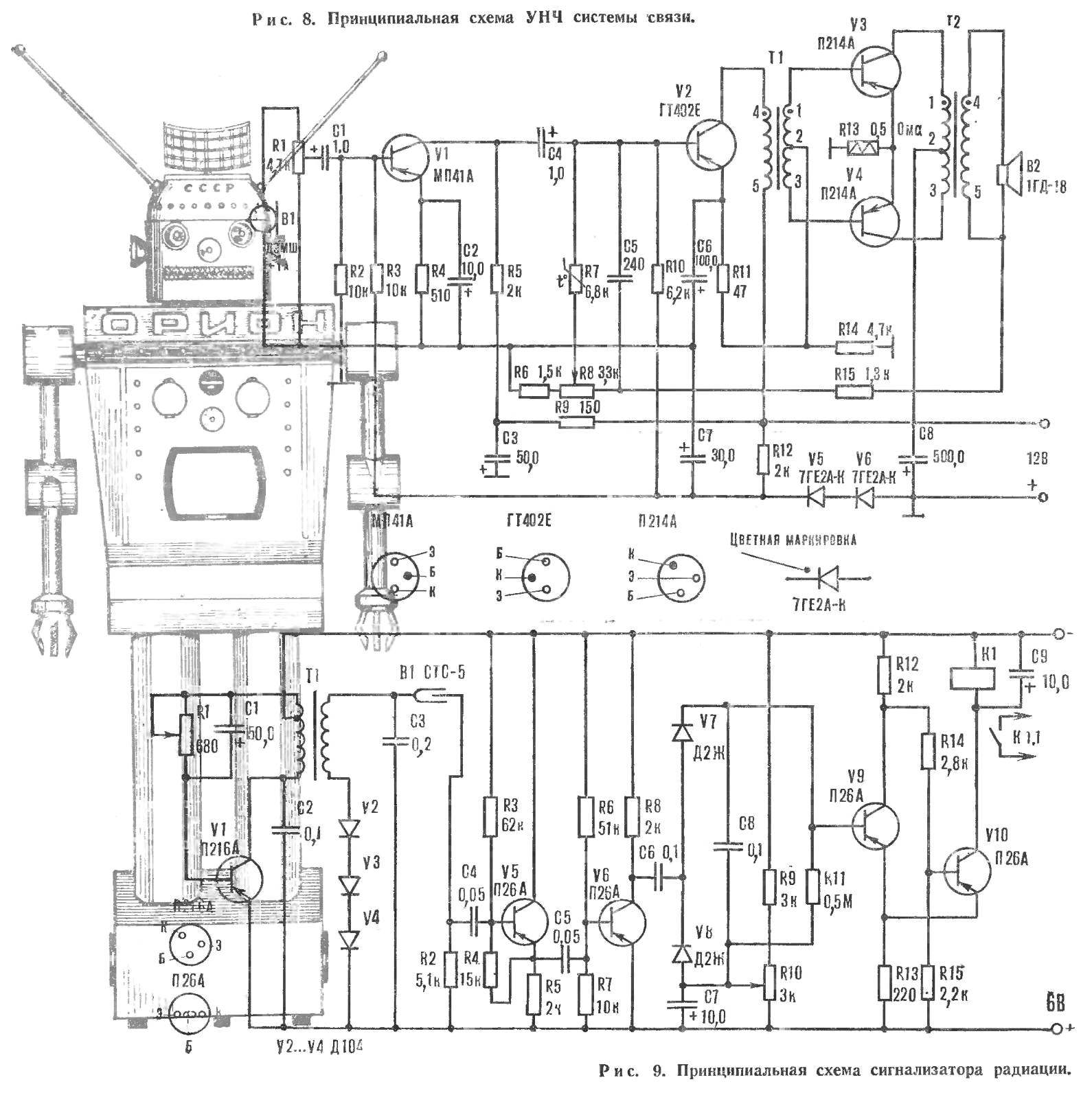
Для температурной стабилизации режима выходного каскада терморезистор R7 ММТ-1 включен в базу инверторного каскада.
В схеме предусмотрены дополнительные меры по улучшению режимной стабилизации каскадов с помощью диодов V5 и V6.
БЛОК «РАДИАЦИЯ» состоит из двух частей — электронной и исполнительной. Назначение его — обнаруживать опасную дозу радиации для космонавтов и оповещать о ней.
Чувствительный элемент устройства — газоразрядный датчик (счетчик) СТС-5. Действие его основано на ионизации газа под действием ядерного излучения. При достаточно высокой напряженности поля в счетчике происходит лавинообразный разряд, усиливающий во много раз ионизационный эффект. Высокое напряжение для питания счетчика вырабатывает блокинг-генератор, собранный ка транзисторе V1 (рис. 9). Трансформатор Т1 намотан на сердечнике из пластин Ш12, толщина пакета 12 мм; первичная обмотка содержит 146 витков с отводом от 26 витка провода ПЭЛ 0,2, вторичная обмотка — 3000 витков ПЭЛ 0,08.
Импульсы блокинг-генератора, выпрямленные диодами V2—V4, заряжают конденсатор С3 до напряжения 300—500 В.
Как только счетчик попадает в зону радиации, возникает разряд. Импульсы напряжения с резистора R2 через конденсатор С4 поступают на двухкаскадный усилитель, собранный на транзисторах V5, V6. С коллекторной нагрузки второго каскада положительные импульсы напряжения поступают через конденсатор С6 на выпрямитель, выполненный по схеме удвоения напряжения на диодах V7, V8. Этот выпрямитель заряжает конденсатор С8. Напряжение, выделяющееся на резисторе R10 при разряде С8, складывается с опорным напряжением на конденсаторе С7, величину которого устанавливают потенциометром R10. Суммарное напряжение приложено к базе транзистора V9, входящего в состав спускового устройства V9, V10. Вот как оно действует.
Когда радиации нет, потенциал на базе зависит только от положения движка R10. Его устанавливают таким образом, чтобы через V9 протекал ток величиной 4—5 мА. При этом транзистор V10 закрыт и тока в обмотке реле К1 нет.
Радиация вызывает появление напряжения на конденсаторе С8, которое, складываясь с опорным напряжением, вызывает уменьшение тока через транзистор V9. При некотором предельно допустимом уровне радиации полупроводниковый триод V10 открывается, вызывая срабатывание репе К1, контактные пластины которого включают красную лампу и звуковой сигнал.
БЛОК «ОРИЕНТАЦИЯ НА СВЕТ» заставляет робот двигаться точно на свет. Воспринимающими элементами являются два фоторезистора В1 и B2 (рис. 11). Когда они не освещены, транзисторы V1 и V2 закрыты и реле К1 и К2 (РЭС-15, паспорт PC4.591.004) обесточены. При освещении фоторезисторов ток через полупроводниковые триоды возрастает, вызывая срабатывание репе К1 и К2. Их контакты включают каждый свой электродвигатель привода «ног», и робот начинает двигаться вперед. Если луч попадает только на один фоторезистор, робот будет поворачиваваться — «искать» источник света.
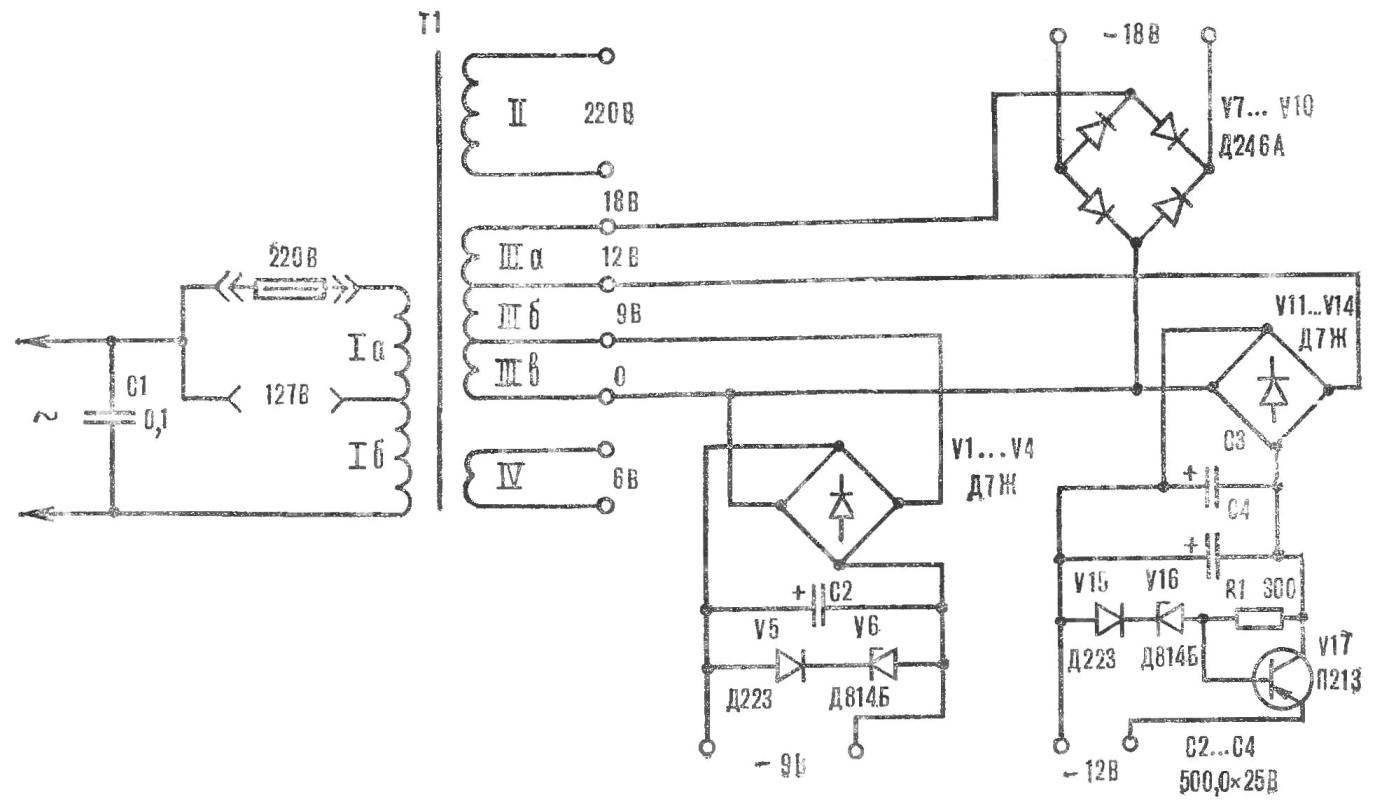
Рис. 10. Схема блока питания.
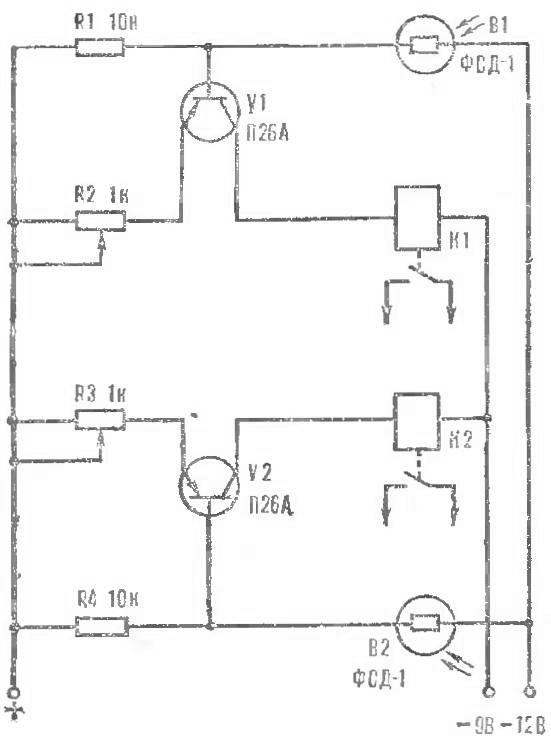
Рис. 11. «Ориентация на свет».
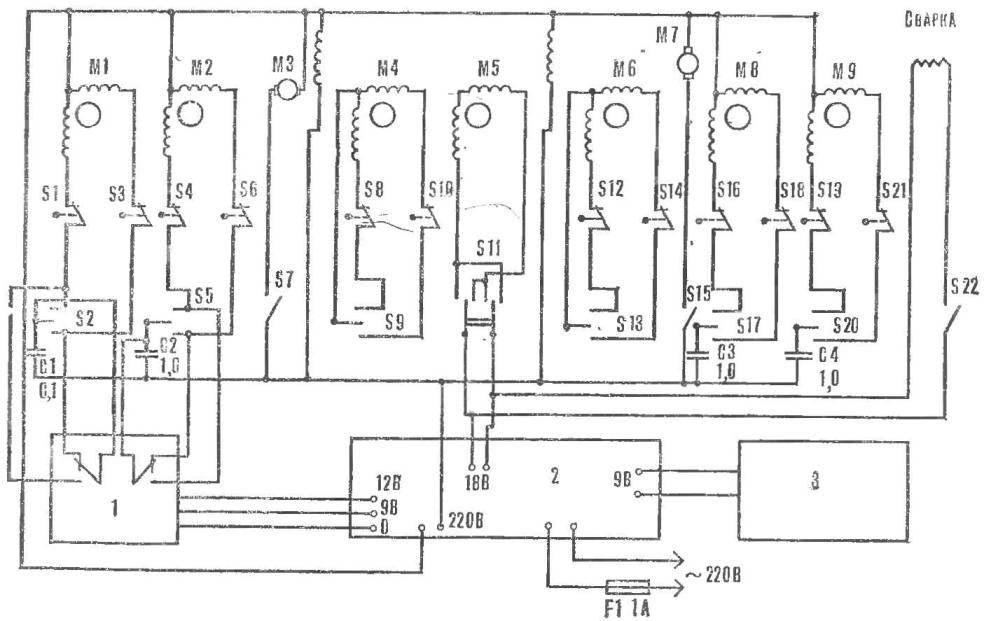
Рис. 12. Схема соединения электродвигателей и блоков:
М1, М2 — двигатели «ног», М3 — двигатель локатора, М4 — поворот «головы», М5 —- двигатель «кисти», М6 — двигатель «локтя», М7 — двигатель ЭВМ, М8, М9 — двигатели подъема «рук»: 1 — блок «Ориентация на свет», 2 — блок питания, 3 — сигнализатор радиации.
Резисторы R1 и R4 служат для установки начального тока транзисторов, с помощью переменных резисторов R2 и RЗ регулируется чувствительность автоматического устройства.
Согласующий и выходной трансформаторы УНЧ связи применены от магнитофона «Весна-3». У силового трансформатора ТС-160 от телевизоров УНТ-47/59, используемого в блоке питания, вторичные обмотки переделаны на напряжения 220, 18, 12, 9, 6 В и содержат соответственно 824 витка ПЭВ 0,4; 62, 41, 31 виток ПЭВ 1,3 и 21 виток ПЭВ 1,7 (рис. 10}.
Оба пульта связаны с роботом проводом МГТФ 0,12 через разъемы ШР-24.
Схема соединения электродвигателей и блоков робота показана на рисунке 12.
После того как конструкция собрана, поверхность робота покрывают цапонлаком, в котором размешан алюминиевый порошок в соотношении 20:1, применяемый для окраски под серебро. Корпус кибера приобретает мягкий стальной цвет с зеленоватым оттенком,
В. ВОРОБЕЙ, г. Сумы
Рекомендуем почитать
 МОДЕЛИСТ-КОНСТРУКТОР 2003-11
МОДЕЛИСТ-КОНСТРУКТОР 2003-11
В НОМЕРЕ: Общественное конструкторское бюро: Е.Сорокин. Снегоход первый, но - удачный (2). Малая механизация: И.Шевченко. «Сладкий» автопоезд (7). Мебель - своими руками:... СОВЕТСКИЕ «ПОЛУТЯЖЕЛОВЕСЫ»
СОВЕТСКИЕ «ПОЛУТЯЖЕЛОВЕСЫ»
Состояние советского крейсерского флота в начале 30-х годов прошлого века едва ли можно охарактеризовать иначе, как печальное. Последние корабли этого класса, лёгкие крейсера типа...
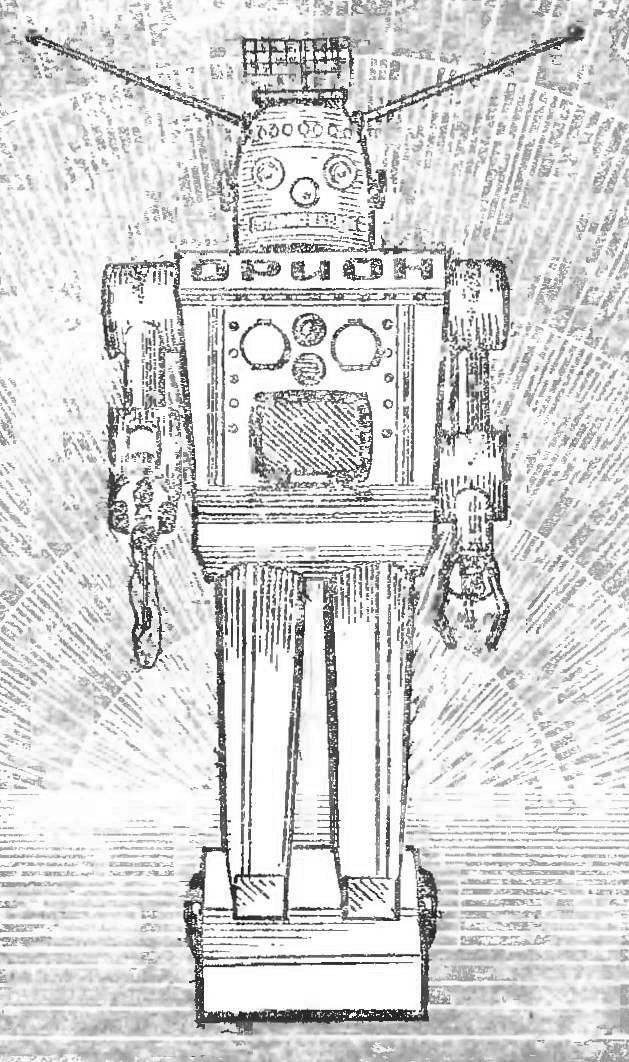
 Возможно, в недалеком будущем, когда новые космические корабли отправятся на Луну, Венеру или Марс, в арсенале космонавтов будут роботы, которые первыми выйдут на поверхность планеты, чтобы провести научные исследования, выполнить несложные сварочно-монтажные работы. Так решили ребята из кружка космического моделирования Сумской городской станции юных техников и построили подобный робот своими руками.
Возможно, в недалеком будущем, когда новые космические корабли отправятся на Луну, Венеру или Марс, в арсенале космонавтов будут роботы, которые первыми выйдут на поверхность планеты, чтобы провести научные исследования, выполнить несложные сварочно-монтажные работы. Так решили ребята из кружка космического моделирования Сумской городской станции юных техников и построили подобный робот своими руками.