

 Автономный робот способен обнаружить и нейтрализовать нежелательных злоумышленников при помощи мягких дротиков, но подключено может быть любое автоматическое оружие, тогда робота можно применить в военных целях. Система состоит из модернизированного электрического оружия Nerf, установленного на механизме сервомотора, Intel Edison, лазерного дальномера и датчика движения. В данной статье подробно описано, как своими руками это сделать.
Автономный робот способен обнаружить и нейтрализовать нежелательных злоумышленников при помощи мягких дротиков, но подключено может быть любое автоматическое оружие, тогда робота можно применить в военных целях. Система состоит из модернизированного электрического оружия Nerf, установленного на механизме сервомотора, Intel Edison, лазерного дальномера и датчика движения. В данной статье подробно описано, как своими руками это сделать.
Шаг 1: Инструменты и материалы

Intel Edison with Arduino breakout
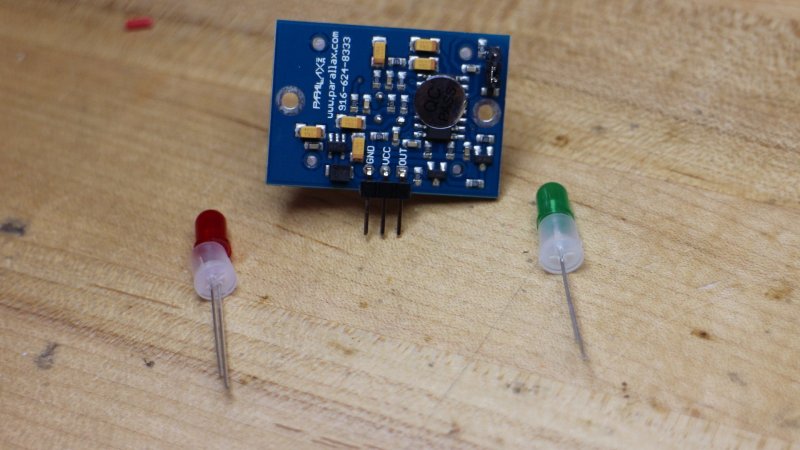
LidarLite V2 – лазеный дальномер
315 Mhz радио (коротковолновое)
Пульт дистанционного управления
(3х) 5мм светодиода
(3х) 1k резистора
(2х) 220R резистор
(2х) 1000uF конденсатора
Фанера
Баллончик чёрной краски + грунтовка
(20х) болтов и гаек к ним
15 см пруток прямоугольного сечения
Шаг 2: Модификация игрушечного автомата. Часть 1

Для начала разберём ружьё. За основу была взята CS-18 N-Strike Elite Rapidstrike. У ружья есть много небольших частей (закрепленных на винтиках), которые необходимо удалить.
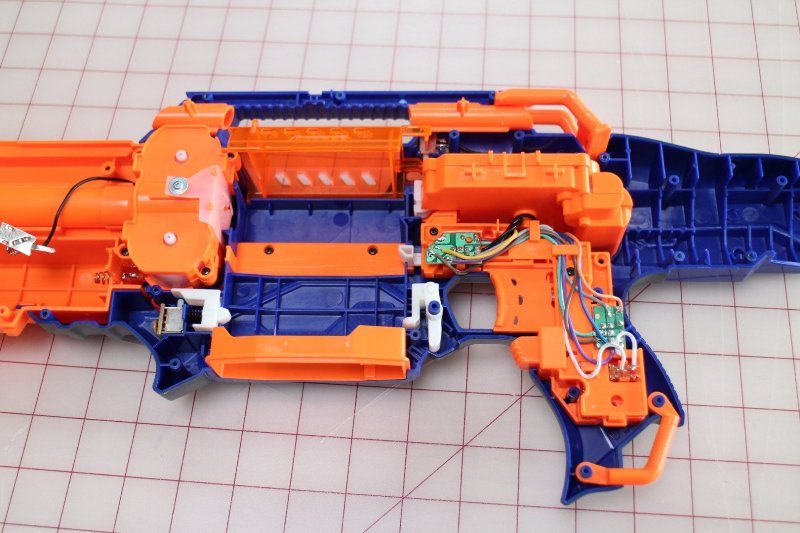
Шаг 3: Модификация игрушечного автомата. Часть 2

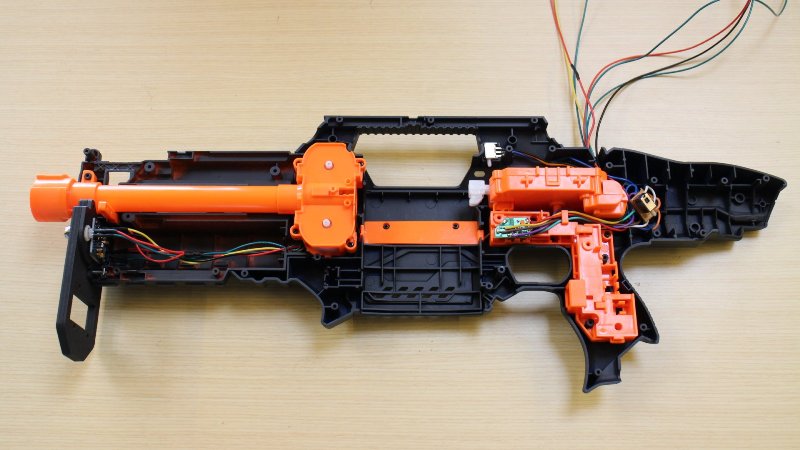
Корпус имеет четыре крепежных винта, которые должны быть ослаблены, чтобы полностью разделить корпус пистолета на две части.
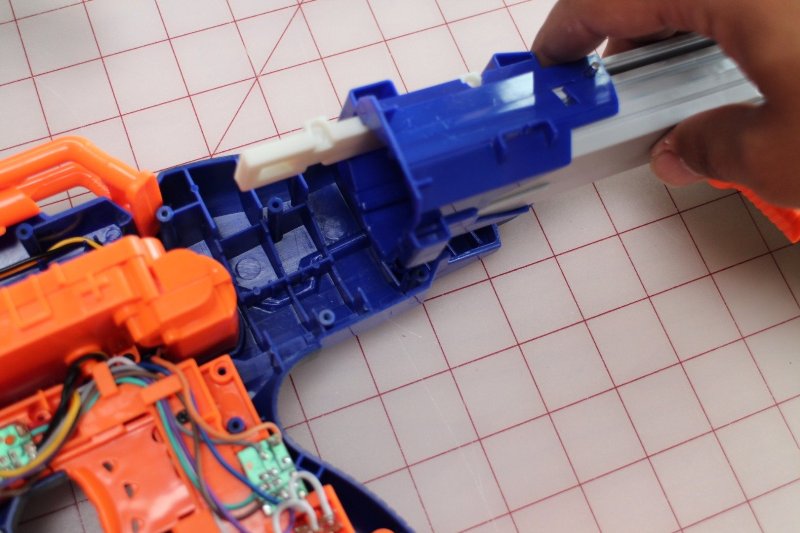
Шаг 4: Модификация игрушечного автомата. Часть 3
По своей сути, пистолет состоит только из двух основных механизмов: линейного привода, который толкает дротик и пары барабанов, которые увеличивают скорость вылета дротика из ствола. Можно сделать супер компактную версию, поместив всё в самодельный корпус, но легче и быстрее изменить заводской вариант. Для того чтобы облегчит следующие шаги, нужно открутить барабан, линейный привод и спусковой механизм.
Шаг 5: Модификация игрушечного автомата. Часть 4
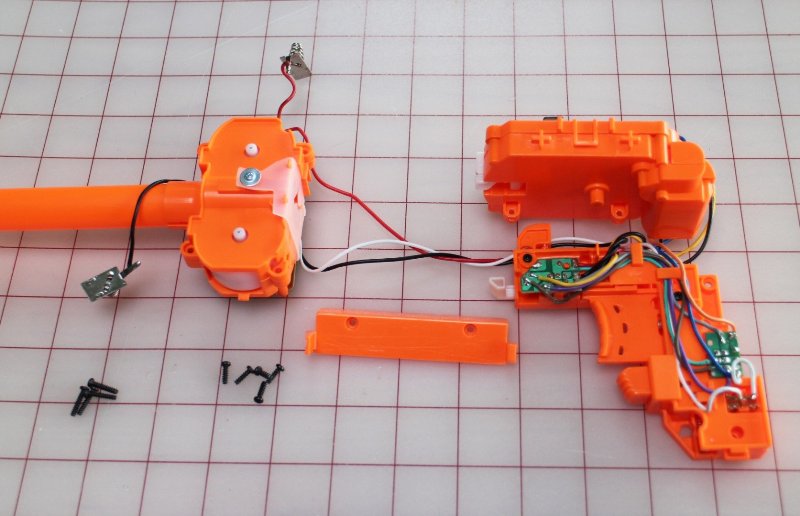
Отделив механизмы от корпуса, можем заняться модификацией электрической схемы. Пистолет имеет много различных предохранителей для предотвращения самопроизвольной стрельбы. В поделке контроль будет осуществляться аппаратно, поэтому вместо физических кнопок будут припаяны платы.
Красный провод: Это основной провод питания, идущий от корпуса батареи.
Белый провод: Через него происходит включение барабана ускорителя. Разрежем провод, ведущий к коммутатору и припаяем его на плату к другому проводу, что шёл от выключателя ранее.
Серый провод: Это провод заземления. Надрежьте его на обоих концах, чтобы удалить его из схемы.
Синий, зеленый и коричневый провода: прикреплены к курковому выключателю. Они могут просто быть замкнуты через коммутатор. Убедитесь, что они не коротнут друг друга!
Шаг 6: Покраска



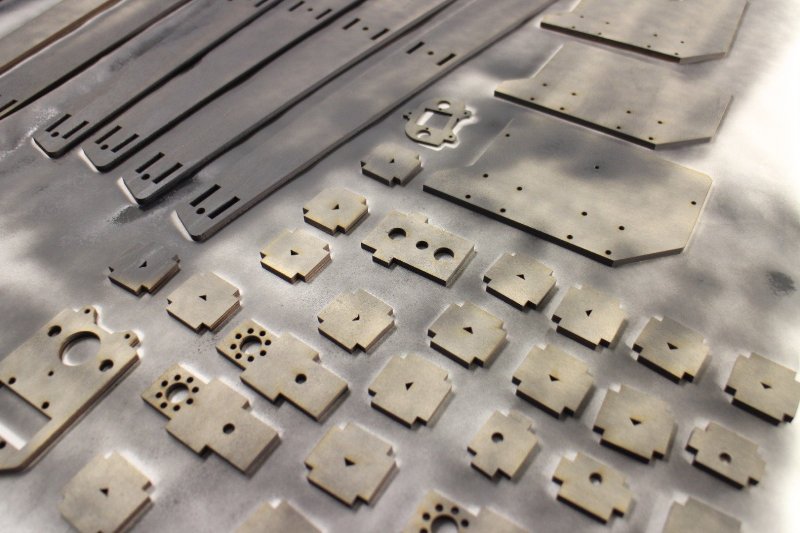
Удалив электронику, покроем части несколькими слоями черной краски, предварительно прогрунтовав поверхность.
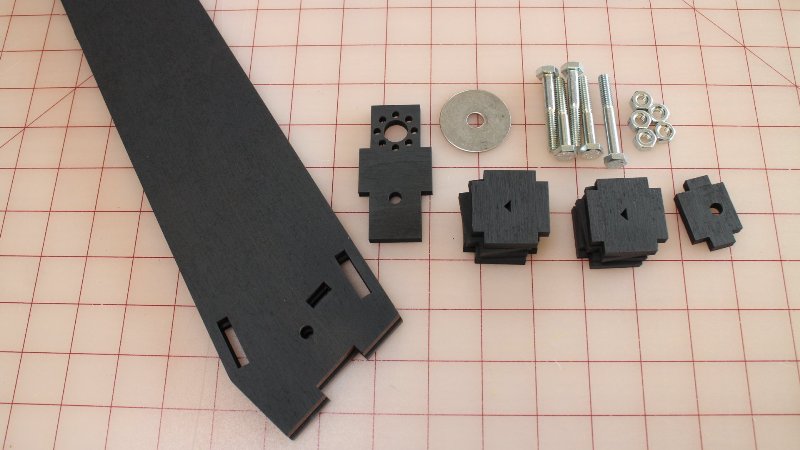
Вырежем ноги и тело турели из 6 мм фанеры.
Intel Auto Sentry Turret Vectors.ai
Шаг 7: Держатель датчиков
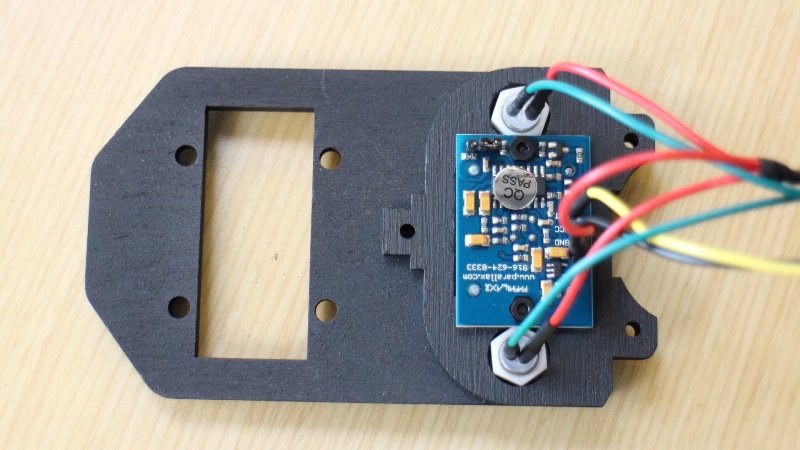
Фанерное основание обеспечит надежное крепление светодиодов инфракрасного датчика и лазерного дальномера. Увеличим длину проводов на 1 м. Дальномер устанавливается на верхней части корпуса и имеет свои провода (вернёмся к этому позже).
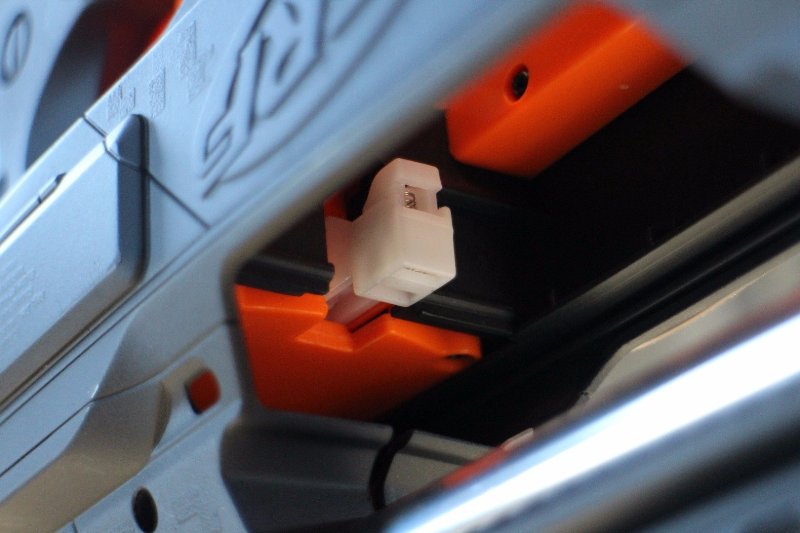
Шаг 8: Модификация игрушечного автомата. Часть 5
Корпус окрашен, схема изменена, датчики зафиксированы – пора собирать всё обратно в корпус. Из-за того, что вокруг механизма барабана очень мало свободного пространства, провода от датчика и светодиодов нужно пропустить через корпус и закрепить заводскими хомутиками. Перед закрытием корпуса необходимо прозвонить систему на предмет короткого замыкания.
Шаг 9: Установка лазера
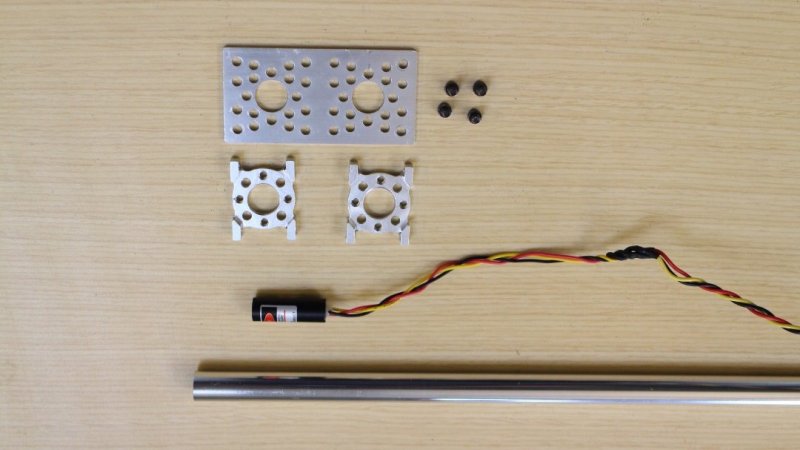
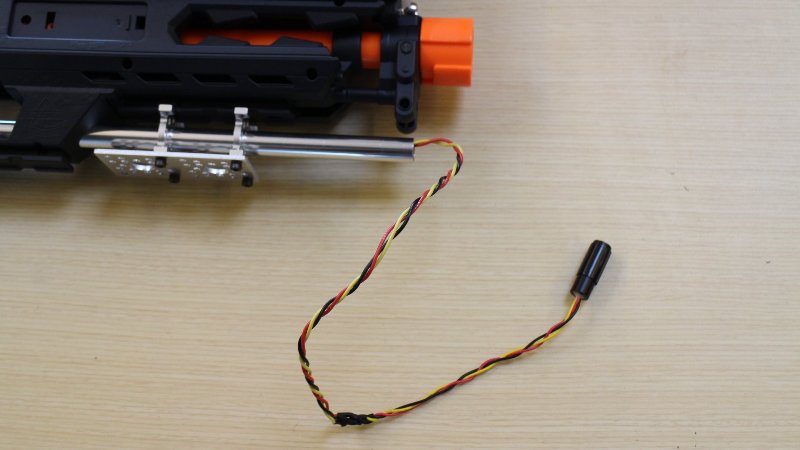
Лазер вставляется в маленькую алюминиевую трубу, которая соответствует размеру «прицела» оружия.
Шаг 10: Установка дальномера


Продлим провода дальномера. Установим сенсор на пластину после чего закрепим всё винтами. Провода дальномера пропустим понизу корпуса.
Шаг 11: Схема
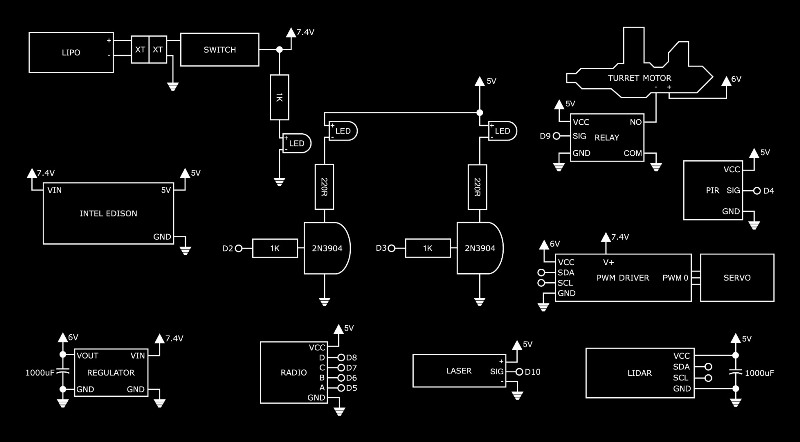
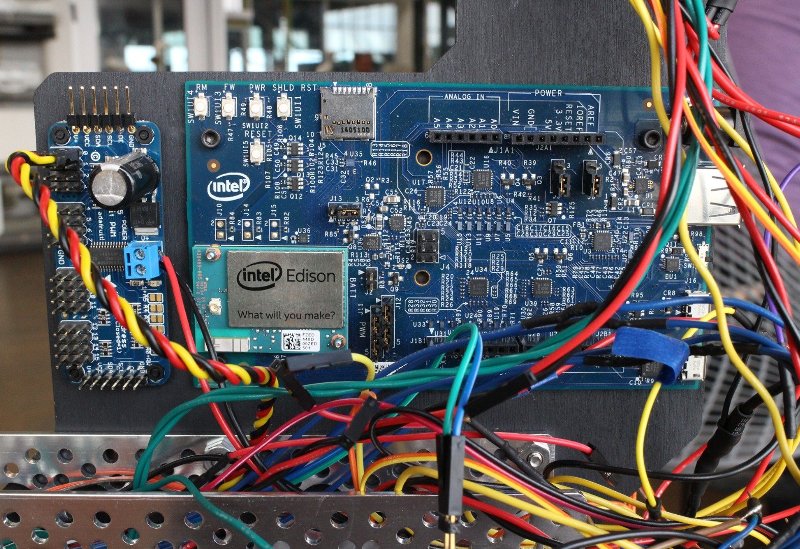
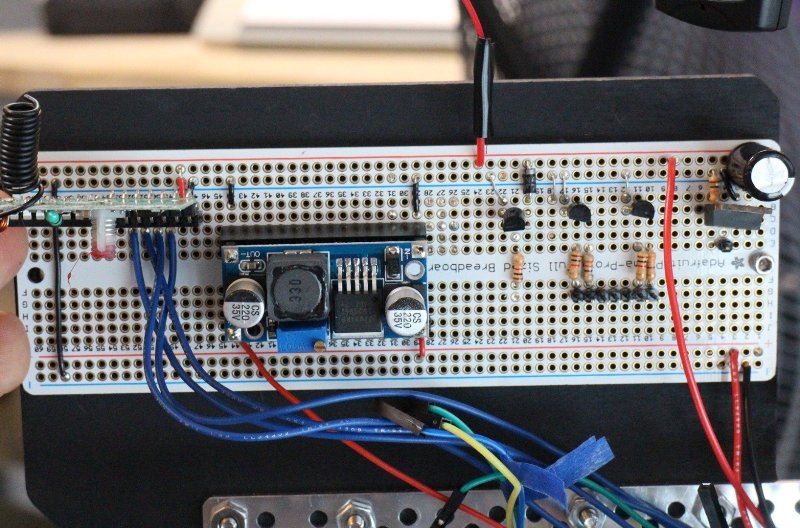
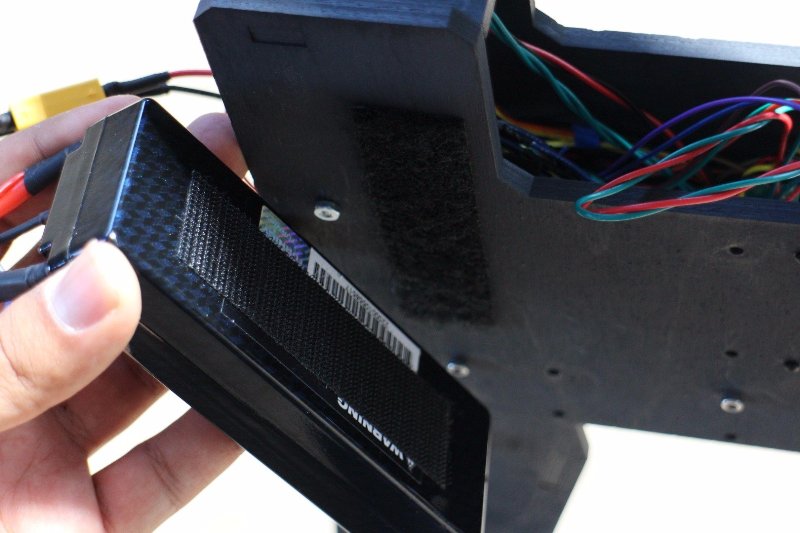
Схема разделена на три блока, что соединяются перемычками: макетная плата, Edison и плата PWM. Макетная плата в основном используется, как шина питания (7,4 В и 5 В батарей). У радиоприемника и регулятора питания есть собственные розеточные штекеры для монтажа на плате. Клеммный блок на плате должен использоваться в качестве основного входного узла связи, поскольку у него есть встроенная схема защиты полярности тока высокого напряжения. Edison и плата PWM прикручены к задним пластинам винтами.
Шаг 12: Система питания
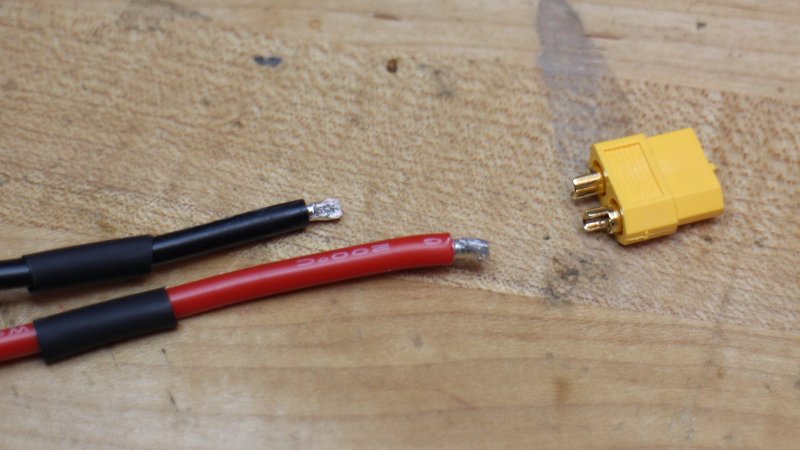
Присоединим штекер XT60 к выводам аккумуляторной батареи. Припаяем гнездо XT60 к заземляющему проводу, а положительный вывод к одному из клемм однополюсного выключателя.
Припаяем 1K резистор к большему проводу, а второй конец к аноду LED.
Спаяем катод светодиода с общим проводом заземления.
Прикрепим LED к небольшой деревянной планке. Закрепим батарею на наружную сторону пластины.
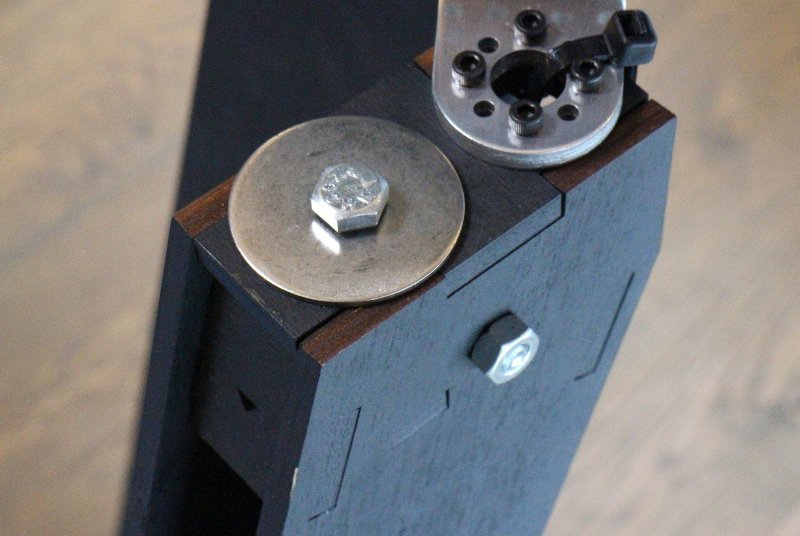
Шаг 13: Установка сервопривода
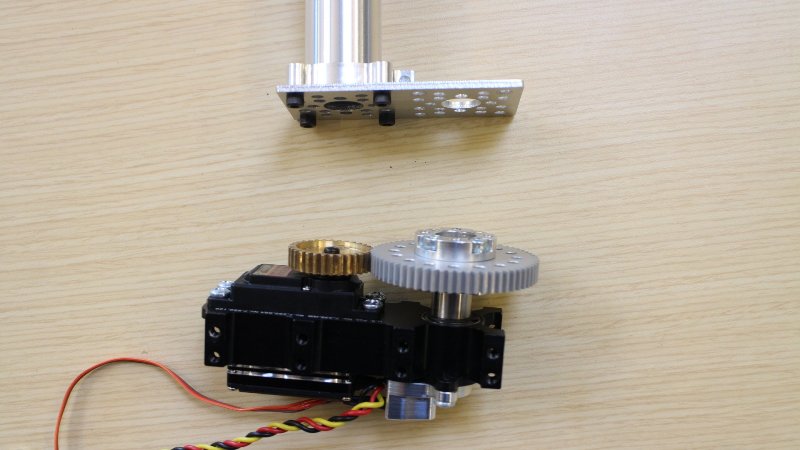

Закрепить опорную плиту к выходу блока сервопривода. Прикрепить две круглых пластины к концам длинного кронштейна.
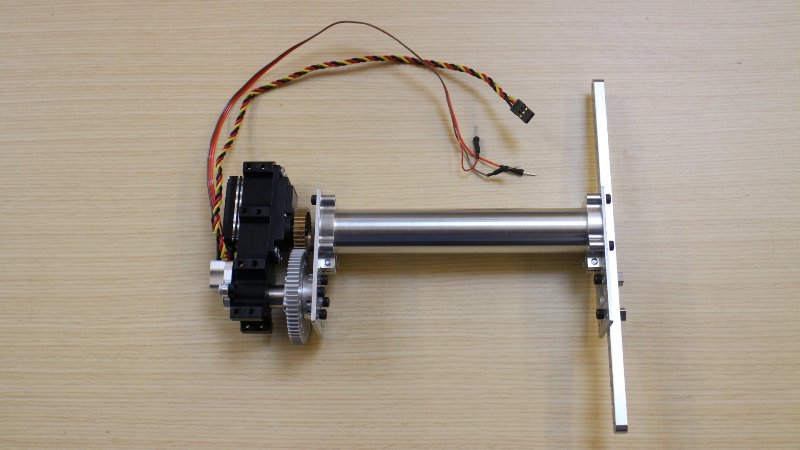
Шаг 14: Монтаж стоек
Монтируем стойку соединив все детали как показано на рисунке.
Шаг 15: Программное обеспечение

Шаг 16: Заряжаем «магазин»
Снарядим магазин 18 дротиками. Иногда дротики не выравниваются должным образом. Их следует скорректировать перед линейным приводом. Просто протолкните дротик вперед , пока он не станет правильно. Это предотвратит осечку.
Шаг 17: Режимы работы


Робот имеет четыре режима работы, которые переключаются автономно. Однако можно управлять режимами с помощью пульта.
Готовность (кнопка A):
LED: красный светодиод будет гореть.
ДАТЧИКИ: Показание дальномера сохраняются примерно в 10 градусном интервале. Информация поступающая с сенсора – игнорируется.
ЛАЗЕР: лазер работает.
СЕРВОМОТОР: вал постоянно вращается с краткими паузами при сборе показаний дальномера.
MISC: Башня записывает показания дальномера в интервале 100 градусов через каждые 10 градусов движения. Если показания датчика будут меньше, чем определенный порог, то турель введет режим стрельбы.
Разоружить (кнопка B):
LED: Зеленый светодиод будет гореть;
ДАТЧИКИ: Показание дальномера сохраняются примерно в 10 градусном интервале. Информация поступающая с сенсора – игнорируется.
ЛАЗЕР: лазер работает.
СЕРВОМОТОР: вал постоянно вращается с краткими паузами при сборе показаний дальномера.
MISC: Edison вводит это состояние в начальную загрузку.
Стрельба (кнопка C):
LED: красный светодиод будет гореть.
ДАТЧИКИ: Дальномер и датчик проигнорированы.
ЛАЗЕР: лазер работает.
СЕРВОМОТОР: сделает паузу под текущим углом на время стрельбы.
MISC: единственное состояние, когда пушка приводится в действие через реле. После стрельбы турель застынет, чтобы позволить установить новый магазин.
Спящий режим(кнопка D):
LED: зелёные и красные светодиоды будут выключены.
ДАТЧИКИ: данные дальномера проигнорированы, но информация с датчика сохранена.
ЛАЗЕР: лазер выключен.
СЕРВОМОТОР: Сервопривод находится в неподвижном состоянии.
MISC: модуль будет ожидать, пока датчик не обнаружит движение, а затем введёт режим разоружения, чтобы продолжать собирать информации.
Получилась неплохая пушка. Человечество не имеет никаких шансов!
С. РОМАНОВ
Рекомендуем почитать
 ТЯЖЕЛЫЙ ТЯГАЧ МАЗ 537
ТЯЖЕЛЫЙ ТЯГАЧ МАЗ 537
Четырехосный автомобиль седельного типа создавался, прежде всего, для транспортировки тяжелой военной техники. Его особенностью стали поворотные колеса первых двух осей. Машина... И ПАХАРЬ, И ЖНЕЦ
И ПАХАРЬ, И ЖНЕЦ
Какая-то странная ситуация сложилась у нас в стране: кто в состоянии купить трактор — тому он не нужен (ну разве что для забавы на загородной вилле), а кому трактор необходим, поскольку...