 В конструкторском деле, как и в любом другом виде творчества, человеку часто приходится идти непроторенным путем. Путь этот вceгдa труден; он под силу только тому, кто в совершенстве владеет способами, методами и средствами конструкторского творчества.
В конструкторском деле, как и в любом другом виде творчества, человеку часто приходится идти непроторенным путем. Путь этот вceгдa труден; он под силу только тому, кто в совершенстве владеет способами, методами и средствами конструкторского творчества.
Как достигнуть этого совершенства?
Наш раздел «Введение в конструирование» поможет вам сделать первые шаги на пути созидания, познакомит с основными приемами конструкторской работы. Из номеров 9,11 и 12 1974 года вы узнали, как разрабатываются общие технические требования, как предварительно рассчитываются основные параметры технического устройства. Сегодня паша тема — выбор способа передачи усилия от двигателя к движителю. Итак…
Теперь нам предстоит разработать конструкцию механизма, который позволил бы передавать вращательное движение вала двигателя на колесо. При этом скорости вращения должны соответствовать каждому из рассмотренных выше вариантов транспортного устройства.
Начнем с простого примера. Требуется привести в движение колесо с помощью электродвигателя, но без промежуточных механизмов. В этом случае достаточно соединить их валы между собой: колесо будет вращаться с той же скоростью, что и ротор электродвигателя. Скорость вращения можно будет регулировать изменением напряжения тока. Но с уменьшением числа оборотов непременно будет уменьшаться и мощность двигателя на валу.
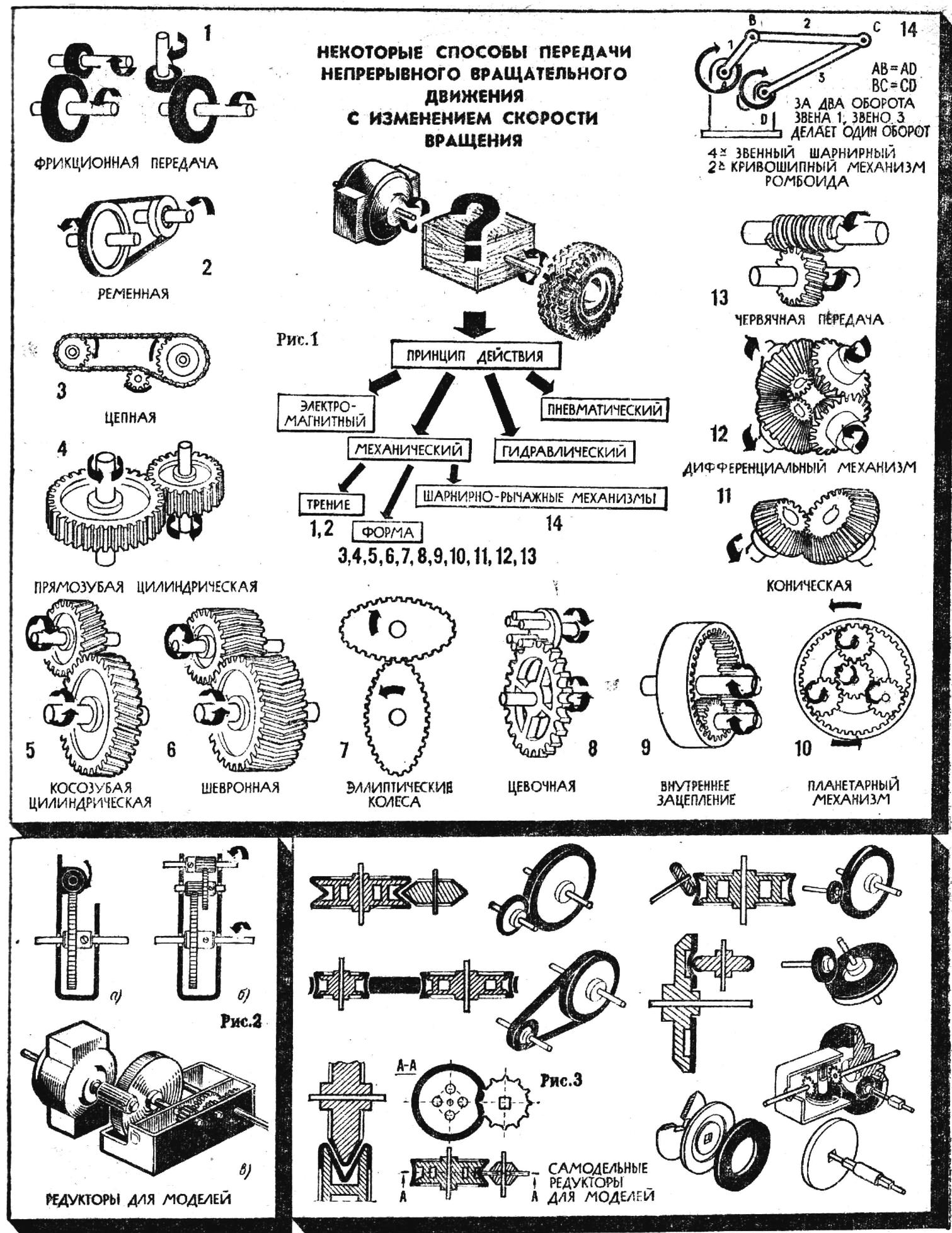
Чтобы получить уменьшение скорости вращения без снижения мощности электродвигателя, приходится применять различные передающие механизмы. Таких устройств, где использованы различные принципы передачи — механический, электромагнитный, гидравлический и другие, — существует сейчас великое множество.
Некоторые из них показаны на рисунке 1. Основным расчетным параметром в этих устройствах является передаточное число I — отношение скорости вращения ведущего колеса n1 к скорости вращения ведомого колеса n2:
i=n1/n2
При передаче вращения трением (фрикционная передача) это отношение будет равно:
i = n1/n2=D2/D1,
где D2, — диаметр ведомого колеса, а D1 — ведущего.
В передачах с использованием зубчатых колес (шестерен):
i = n1/n2=Z2/Z1,
где Z2 — количество зубьев ведомого колеса, Z1 — ведущего.
Из этого соотношения следует, что для уменьшения (увеличения) числа оборотов ведомого колеса в несколько раз необходимо соответственно во столько же раз увеличить (уменьшить) его диаметр, а у шестерен — число зубьев.
Если в передаче используется одна пара колес, она называется одноступенчатой; две пары — двухступенчатой и т. д. В многоступенчатых передачах iобщ = i1·i2·i3…in, где i1, i2, i3 и т. д.— передаточные числа отдельных ступеней.
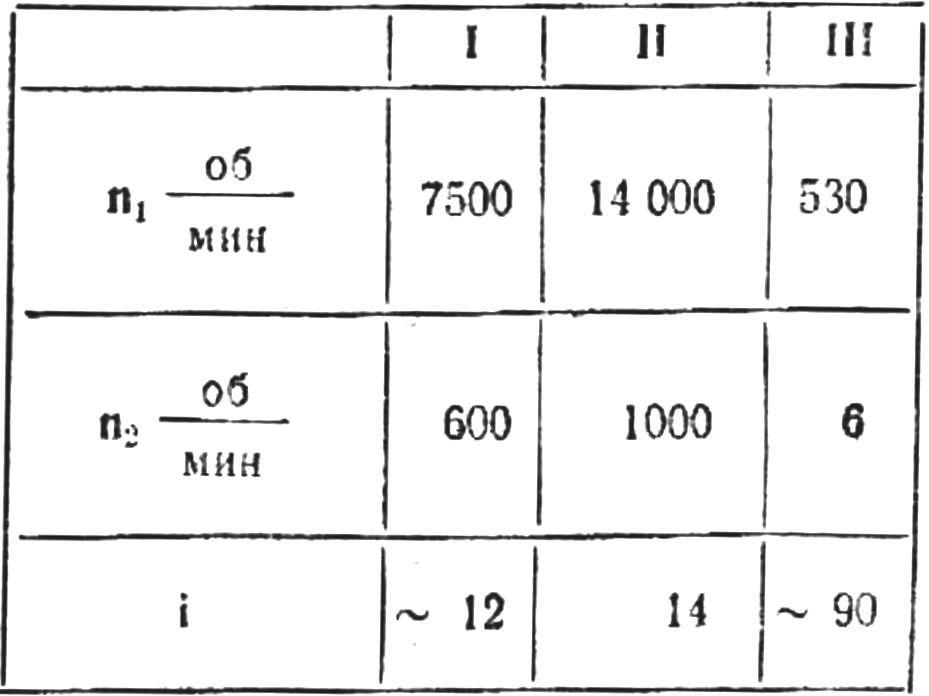
Теперь определим число I для передающих механизмов применительно к трем рассматриваемым нами вариантам технических устройств, а полученные результаты оформим в виде таблицы.
Назовем дополнительные требования к работе передающих механизмов применительно к рассматриваемым техническим устройствам.
В первом варианте необходимо, чтобы передача движения на колесо прекращалась практически одновременно с остановкой двигателя.
Этому условию наиболее полно будет отвечать применение в передающем механизме червячной передачи. Для нее I определяется как отношение числа зубьев червячного колеса Z2 к числу заходов (ниток) червяка то есть
i = Z2/Z1.
При i=12 целесообразно использовать червяк с числом заходов от 1 до 6.
Возьмем число заходов равным 1 (такой червяк можно подобрать в наборе типа «Конструктор») и определим число зубьев червячного колеса, необходимое для обеспечения заданной скорости вращения колеса.
По формуле
i = n1/n2=Z2/Z1
находим:
Z2 = Z1·n1/n2=1·7500/600
Таким образом, передающий механизм, обеспечивающий заданную в варианте 1 скорость вращения колеса, может состоять из одноступенчатой червячной передачи с однозаходным червяком и червячного колеса с числом зубьев, равным 12 (рис. 2, а).
В варианте II (работа на пришкольном участке) прекращение движения может быть более плавным.
i = i1·i2=(Z2/Z1)·(Z4/Z3)
В этом случае в передающем механизме можно использовать цилиндрические шестерни с прямым зубом. Поскольку i = 14, то целесообразно использовать две пары шестерен, то есть
i = i1·i2=(Z2/Z1)·(Z4/Z3).
но из таблицы нам известно, что
i =n1/n2=14000/100=14/1.
Теперь мы можем подобрать передаточные числа ступеней:
i = (Z2/Z1)·(Z4/Z3)=14/1=2/1·7/1.
Но количество зубьев у шестерни не может быть меньше 6, поэтому найденное соотношение необходимо увеличить в 6 раз:
i = (Z2/Z1)·(Z4/Z3) = (2/1·7/1)·6=12/6·42/6.
Следовательно, Z1=6, Z2=12, Z3=6, Z4 = 42 (рис. 2, б).
Передающий механизм модели планетохода (III вариант) должен обеспечить передачу с i = 90, следовательно, можно использовать многоступенчатый шесте- ] репчатый редуктор или комбинированный передающий механизм, включающий в себя и другие способы передачи, например червячную, фрикционную.
Можно попробовать подобрать готовый редуктор из механизмов, которые выпускает промышленность для игрушек. Наиболее приемлемым из них может быть редуктор для игрушки с инерционным двигателем. Диаметр маховика в этом механизме равен 40 мм, а шестерни имеют число зубьев соответственно Z1=6; Z2=18; Z3=6; Z4= 18.
У этого редуктора на первой ступени передачи удобно использовать силы трепня, а на последующих оставить прямозубые цилиндрические шестерни.
Па вал двигателя в этом случае необходимо одеть резиновую трубку так, Чтобы толщина вала с трубкой была примерно равной 4 мм (рис. 2 в). Тага я передача обеспечивает заданную скорость движения модели. Для повышения надежности и маневренности движения модели (развороты вправо, влево, кругом) будем использовать два двигателя и два редуктора, по одному с каждой стороны.
В наших моделях мы отказались от использования соединительных муфт. Ведущее колесо (шестерня, червяк, шкив) первой ступени крепится на валу двигателя, а ведомая шестерня последней ступени редуктора крепится на валу колеса.
Подшипники и опоры для осей и валов могут быть стандартными или самодельными. Эти вопросы применительно к нашим моделям уточняются при решении технологических задач на этапе изготовления и сборки механизма.
На этом разработка конструкции передающего механизма может быть окончена. Но как быть, если готовых шестерен нет, а изготовить их в условиях кружка часто невозможно? На рисунке 3 показано несколько разновидностей самодельных передающих механизмов. Любая из таких передач работает достаточно надежно, даже если допустить небольшие неточности в изготовлении. Попробуйте применить эти идеи на практике. Предлагаем вам продолжить самостоятельную разработку самоходных транспортных тележек (см. «Моделист-конструктор», 1974, № 11). Определите передающие механизмы для этих устройств.
Литература:
Справочник для изобретателя и рационализатора. М.—Свердловск, Машгиз, 1963.
Артоболевский И. И. Механизмы в современной технике. М., «Наука», 1971.
Ковалев Н. А. Теория механизмов и деталей машин. М., «Высшая школа», 1974.
Сборник задач и примеров расчета по курсу деталей машин. М., «Машиностроение», 1974.
Детская энциклопедия, т. 5, изд. 2. М., «Просвещение», 1965.
Рекомендуем почитать
 КОРМИЛЕЦ АККУМУЛЯТОРА
КОРМИЛЕЦ АККУМУЛЯТОРА
Предлагаю схему зарядного устройства для аккумуляторов автомобилей. Ток зарядки 5 — 6 А, напряжение на выходе устройства 20 В. Схема обеспечивает стабилизированный плавный запуск, проста... «ВЭФ» С ФИКСИРОВАННОЙ НАСТРОЙКОЙ
«ВЭФ» С ФИКСИРОВАННОЙ НАСТРОЙКОЙ
Доработки радиоприемников «ВЭФ» чаще всего направлены на то, чтобы оснастить их «зарубежным» вещательным или любительским КВ диапазоном. Однако есть многочисленная группа радиослушателей,...