Уезжая на несколько дней из дома, я уже не беспокоюсь, что аквариумные рыбки останутся голодными. Регулярно, дважды в день, механическая кормушка снабжает их сухим кормом.
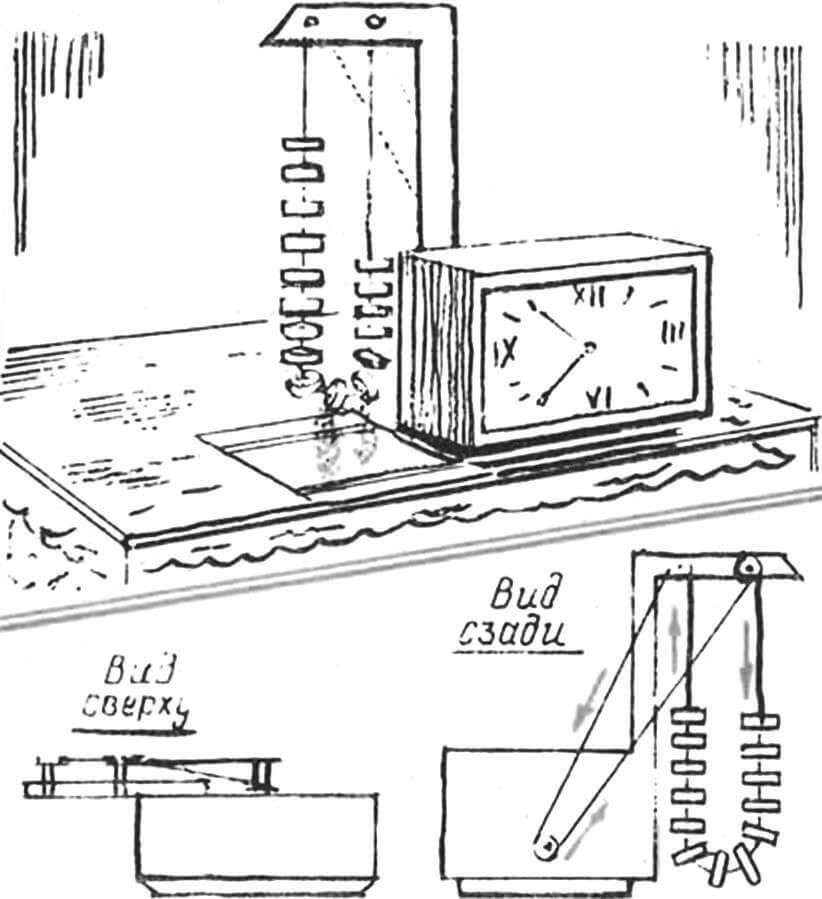
В качестве привода и задатчика времени в моей кормушке используются механические часы с недельным заводом типа «Маяк». Для этого соосно с заводной рукояткой закреплен барабан. Через него и два дополнительных ролика на стойке, привинченной к корпусу часов, переброшена шелковая нить. На ней закрепляются небольшие чашки (например, из обычных пластиковых шашек, просверленных по центру). Расстояние между ними, соответствующее интервалам кормления, подбирается экспериментально.
Каждое утро и вечер, когда наступает время кормления, заводные часы поворачивают барабан, перемещая нить с чашечками. Чашечки переворачиваются над аквариумом и выпускают корм в воду. Это простое и надежное устройство позволяет мне быть уверенным в том, что мои рыбки получают пищу даже в мое отсутствие.
Я долго искал решение для автоматической кормушки, и многие коммерческие варианты либо не подходили по своим характеристикам, либо были слишком дорогими. Моя же самодельная конструкция оказалась не только экономичной, но и удобной в эксплуатации. К тому же, она легко настраивается и модернизируется. Например, можно заменить шелковую нить на более прочный материал, если рыбки активны и часто дергают за нее.
Кроме того, этот механизм работает практически бесшумно, что особенно важно для меня, так как аквариум находится в спальне. Теперь я могу спокойно спать, зная, что рыбки накормлены и не будут тревожить меня ночью.
Использование механических часов как основы для кормушки оказалось удачным решением благодаря их надежности и точности. Часы «Маяк» славятся своим долговечным механизмом, который легко заводится и работает без перебоев. Эта конструкция вдохновила меня на создание других автоматических устройств для аквариума, таких как автополив растений и системы аэрации.
В будущем планирую усовершенствовать кормушку, добавив возможность регулировки порций корма и дистанционного управления с помощью микроконтроллеров. Это позволит еще более точно контролировать процесс кормления и обеспечивать рыбкам оптимальные условия даже в мое длительное отсутствие.
Р. ДЖЕМИЛЕВ, г. Самарканд
Рекомендуем почитать
 ВСЕСЕЗОННЫЙ ВЕЗДЕХОД «4X4»
ВСЕСЕЗОННЫЙ ВЕЗДЕХОД «4X4»
При проектировании этого вездехода, конструктор-любитель Л. Антохов из г. Кириши Рязанской области стремился сделать всесезонную, надёжную и высокопроходимую машину с небольшими... МОДЕЛЬ РАКЕТНОГО КАТЕРА
МОДЕЛЬ РАКЕТНОГО КАТЕРА
Ракетные катера предназначены для нанесения внезапных ракетных ударов по надводным кораблям и транспортным судам, совершающим перевозки на морских коммуникациях в районах боевых...