На радиоуправляемых моделях самолетов, планеров и вертолетов нередко приходится одновременно Заставлять отклоняемые органы управления выполнять различные функции. Скажем, на моделях самолетов и планеров часто совмещают функции элеронов и закрылков на одних рулевых поверхностях крыла, а при управлении шагом основного винта и креном на радиовертолете используется один шарнир.
Решать такие задачи можно с помощью электронного микшера, позволяющего смешивать сигналы различных каналов. Однако «влезать» в электронную часть аппаратуры нежелательно. Гораздо проще использовать так называемый механический микшер.
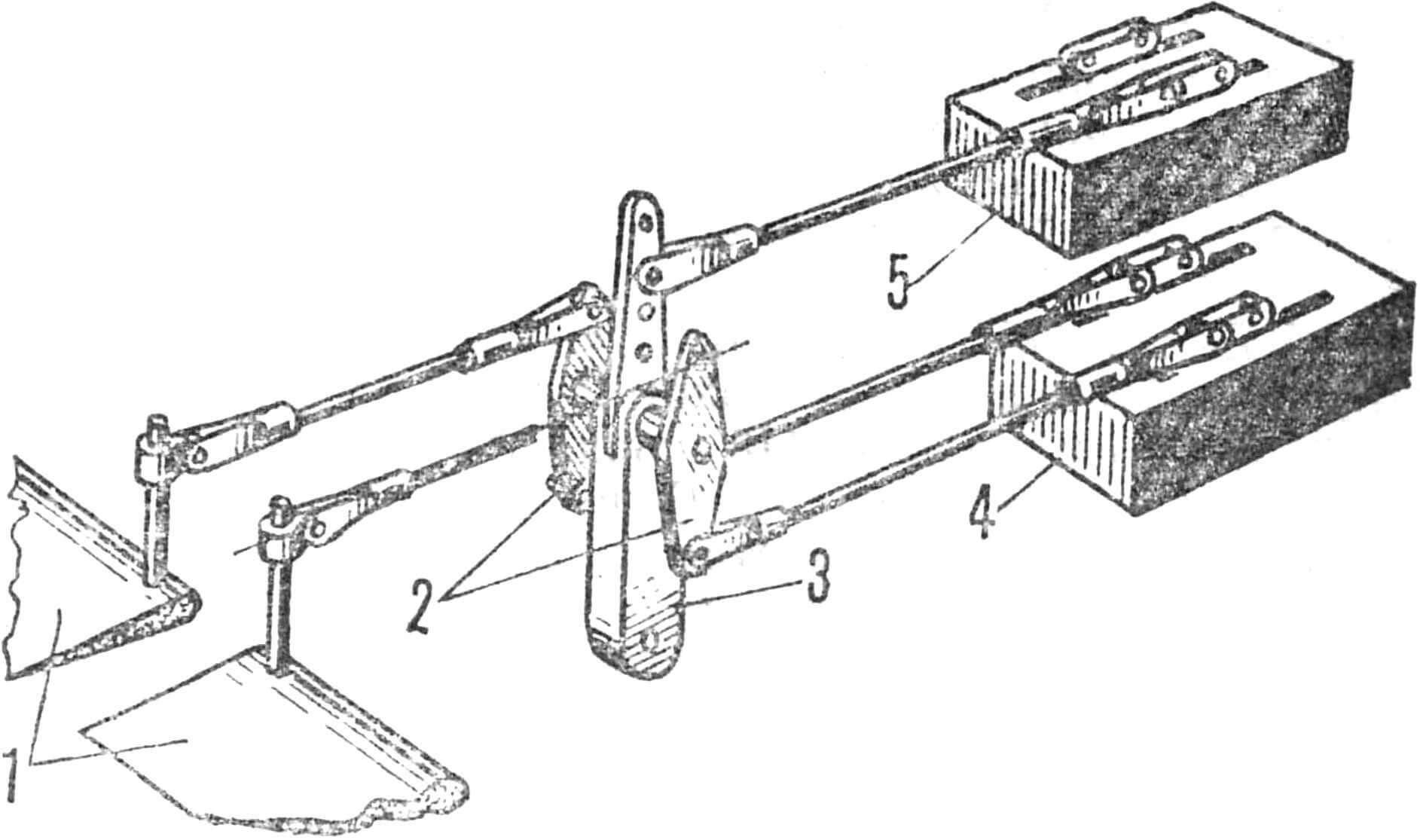
Рис. 1. Механический микшер из двух однотипных рулевых машинок:
1 — рули, 2 — двуплечие качалки, 3 — средняя (центральная) качалка, 4 — рулевая машинка № 2 («крен»), 5 — рулевая машинка № 1 («закрылок»).
Вот, например, как устроен механизм управления рулевыми поверхностями, выполняющими функции элеронов и закрылков. Такую систему чаще всего устанавливают на радиопланерах, чтобы не делать еще одну пару отклоняющихся рулей. Этот вариант (рис. 1) представляет собой систему трех качалок. Центральная закрепляется на оси в нижней части на плате модели. В верхней части качалки — отверстия для тяги к рулевой машинке. Назовем ее рулевой машинкой № 1. На ось, вмонтированную в средней части центральной качалки, насажены две двуплечие качалки. Они соединены тягами с рулевой машинкой № 2, управляющей элеронами.
Кинематика работы микшера такова. Когда не работает машинка № 1, центральная качалка неподвижна и машинка № 2 приводит в действие рулевые поверхности на консолях в режиме элеронов. Стоит машинке № 1 отклонить центральную качалку вперед, переместится и блок двуплечих качалок. Их тяги, в свою очередь, отклонят рулевые поверхности крыла вниз на одинаковый угол — таким образом рулевая машинка № 1 управляет каналом «закрылок». Рулевая машинка № 2 при любом отклонении закрылков может ввести асимметричность в их положение, осуществляя тем самым управление по каналу «крен».
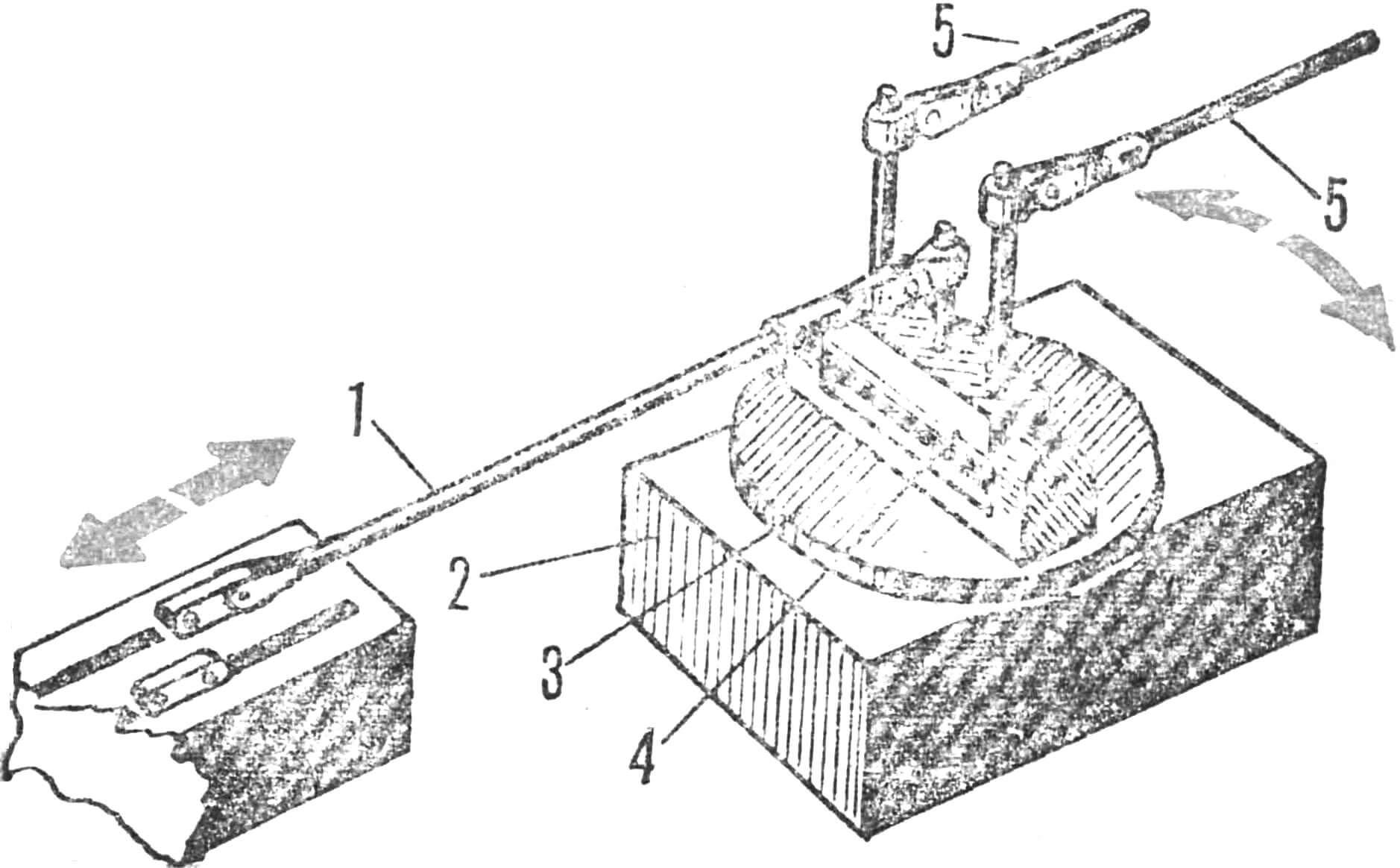
1 — тяга от рулевой машинки № 1 («закрылок»), 2 — рулевая машинка № 2 («крен»), 3 — основание микшера, 4 — центральная качалка, 5 — тяги к рулям.
Рекомендуем для начала изготовить модель механизма и с ее помощью отработать кинематику привода, уточнить углы отклонения рулевых поверхностей. На нашей модели мы пришли к оптимальному, на наш взгляд, соотношению: отклонение закрылков вверх на 5°, вниз — на 50°, при этом во всем диапазоне углов сохраняется возможность подавать команду на эти рули, как на элероны.
На рисунке 2 изображен микшер для машинки, у которой выход выполнен в виде вращающегося диска. По принципу работы он не отличается от предыдущего механизма. Однако здесь работа рулевой машинки № 2 приводит в движение рули в режиме элеронов, а машинка № 1 работает по каналу «закрылок».
В. МИХЕДА, мастер спорта
Рекомендуем почитать
 ВИНТ В ПОМОЩЬ КЛИНУ
ВИНТ В ПОМОЩЬ КЛИНУ
В столярных верстаках часто ломаются задний зажим и верстачная крышка, так как учащиеся, устанавливая заготовку, вынуждены забивать в отверстия крышки и зажима клинья. У себя в кружке... «Стрекоза»-победительница
«Стрекоза»-победительница
Анализ числа участников юношеских соревнований авиамоделистов в классах свободнолетающих однозначно говорит о гораздо более высокой доступности планеров по сравнению с резиномоторными. Это...