
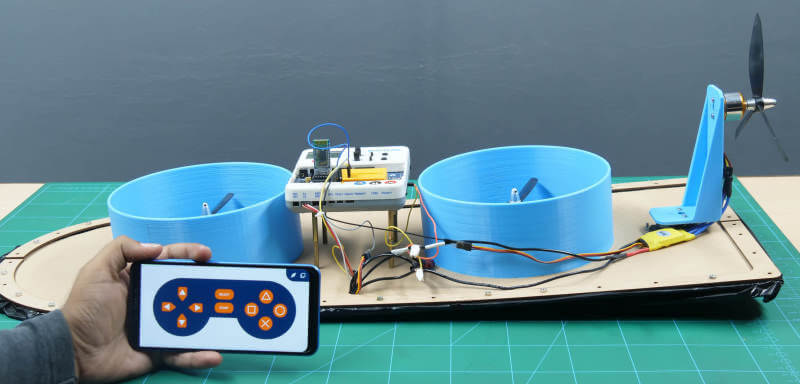
Мы создали электрическое судно, управляемое смартфоном Xiaomi Mi 9T 64, и сделали планер. В этом проекте мы собираемся сделать что-то, что может как скользить, так и летать! Вы угадали; мы собираемся показать вам, как сделать свое собственное судно на воздушной подушке самостоятельно в вашем доме. Мы собираемся запрограммировать его с помощью PictoBlox, нашего программного обеспечения для графического программирования с расширенными возможностями таким образом, чтобы мы могли управлять им с помощью Dabble, нашего гениально простого разработанного приложения для управления и работы с проектами;). Скачайте PictoBlox и получите Dabble в Google Play. Чего же вы ждете? Давайте начнем!

Шаг 1. Список необходимых комплектующих
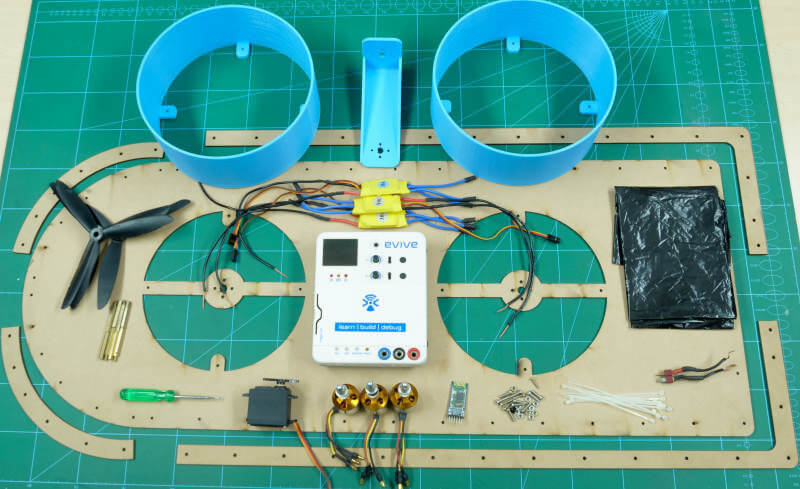
Детали
· evive
· Модуль Bluetooth HC-05
· Двигатель A2212 / 13T 1000KV БДПТ (бесколлекторный (бесщеточный) двигатель постоянного тока)
· Simonk 30A Электронный регулятор скорости
· 177,8 мм 3 лопастные винты
· Металлический сервопривод
· Аккумулятор Lipo 3S 2200mAh
· Перемычки
· M3 Гайка и болты
· Полиэтиленовый пакет
· Кабельные стяжки
· Вырезанные листы из МДФ
· 3D печатные части
· Тонкая двухсторонняя клейкая лента
· Отвертка
· Изоляционная лента
· 25 мм стойки для плат «мама-папа»
Программное обеспечение
- PictoBlox
- Dabble
Шаг 2: Понимание дизайна
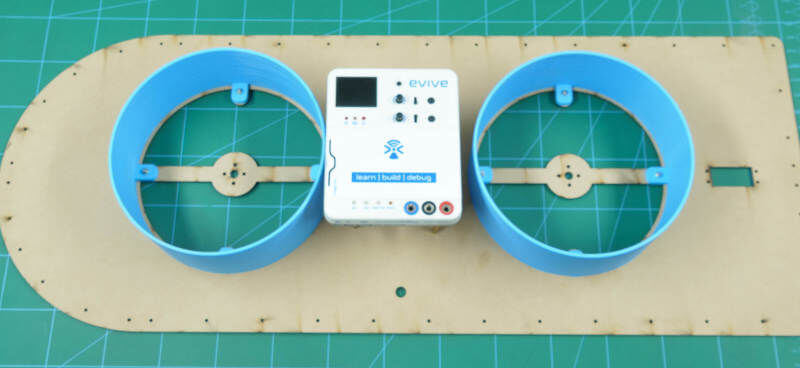
Транспортное средство на воздушной подушке состоит из некоторых частей из МДФ и некоторых напечатанных в 3D частей, чертежи и файлы которых можно найти ниже.
A, B, C, D: пластины для удержания подушки
E: Платформа
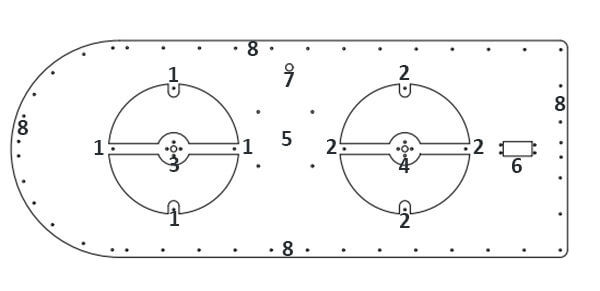
Мы собираемся собрать все основные узлы нашего судна на воздушной подушке на платформе, что делает необходимым тот факт, что платформа должна быть достаточно прочной, чтобы выдержать этот вес. Кроме того, нам нужно, чтобы наше судно взлетало, поэтому она также должна быть легкой. Давайте сначала разберемся с дизайном платформы.
1, 2: для работы с подъемным двигателем
3, 4: для крепления двигателей БДПТ
5: для крепления evive
6: для фиксации рулевого управления
7: отверстие для пропуска проводов
8: для удерживания подушки
Шаг 3: Что такое БДПТ и ЭРС
Прежде, чем мы начнем собирать транспортное срество на воздушной подушке, давайте сначала разберемся с двумя основными элементами судна на воздушной подушке, двигателем БДПТ и ЭРС.
БДПТ
БДПТ является аббревиатурой от бесколлекторный (бесщеточный) двигатель постоянного тока. У них нет щеток по сравнению с обычными двигателями постоянного тока. Почему БДПТ? Преимущества бесщеточного двигателя состоят в том, что они имеют высокое соотношение мощности и веса, высокую скорость и электронное управление. И для того, чтобы наше судно поднялось над поверхностью, нам нужны мощные двигатели, которые вращаются с высокой скоростью.
ЭРС
ЭРС — это сокращение от электронного регулятора скорости. Как следует из названия, это устройство, которое контролирует скорость двигателя, регулируя мощность двигателя.
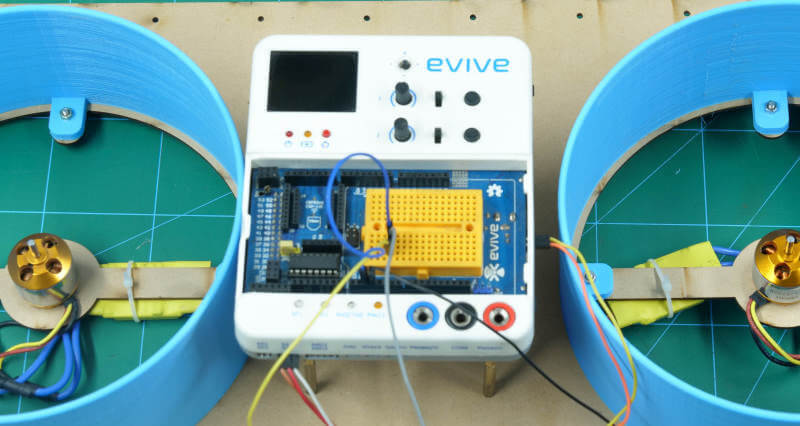
Шаг 4: Собираем базу
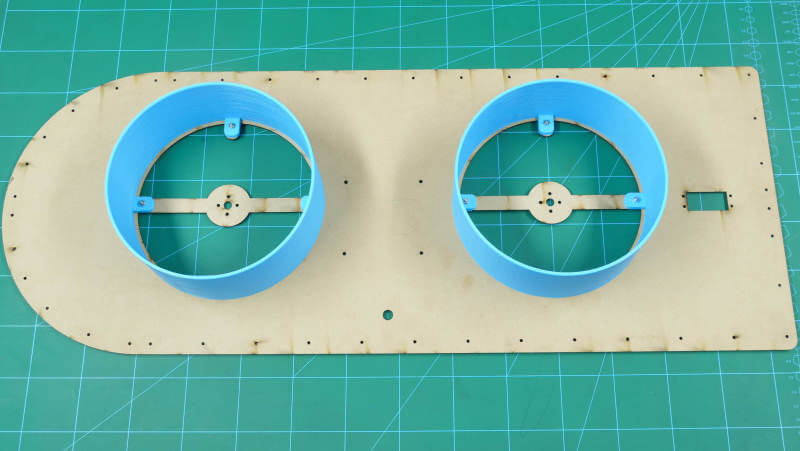

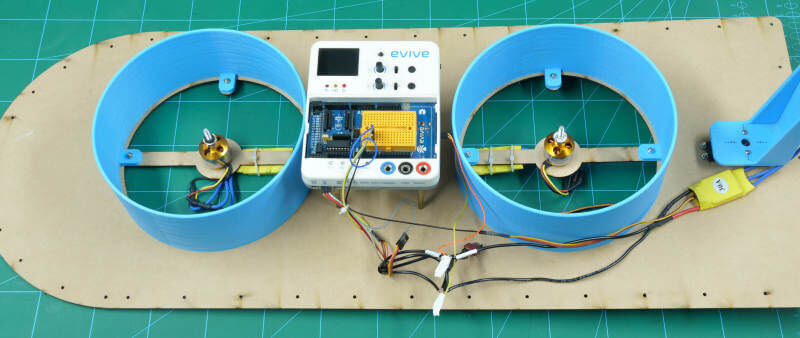
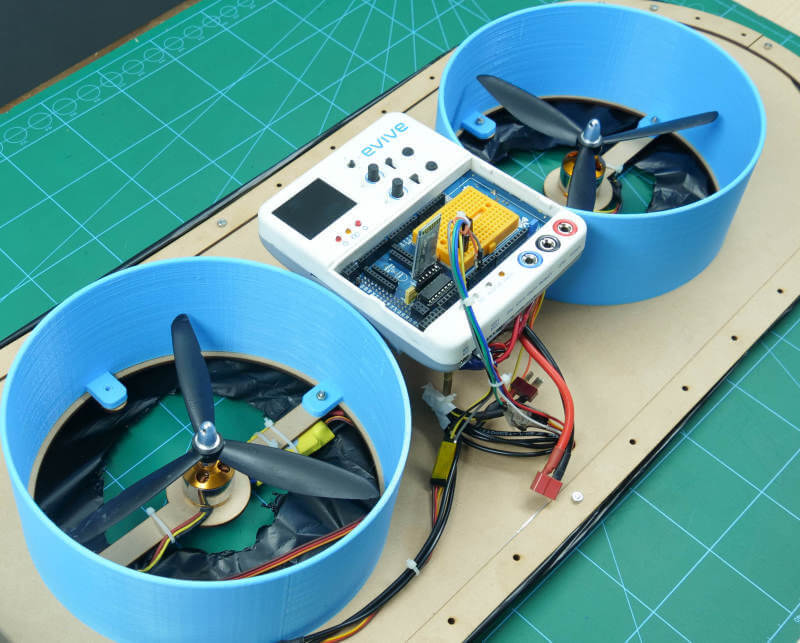
Возьмите платформу и напечатанные в 3D корпуса двигателя подъема и закрепите их в положении 1 и 2 с помощью болтов М3 длиной 12 мм и гаек М3. Мы собирем весь наш двигатель для подъема в этих корпусах, а корпуса, в свою очередь, обеспечат нагнетание воздуха вниз и не дадут ему расходиться в стороны из-под пропеллеров. Теперь пришло время добавить наш мозг: evive. Мы будем прикреплять evive в центре платформы и немного выше корпусов подъемного двигателя. Для этого мы используем регулировочные стойки. Крепление evive в центре помогает равномерно распределить баланс (сделать балансировку). Прикрепите регулировочные стойки «мама-папа» длиною 50 мм (соедините их 25 + 25) мм к четырем углам на платформе evive. После этого возьмите evive и зафиксируйте ее на месте 5 с помощью болтов M3.
Шаг 5: Крепим подъемные двигатели


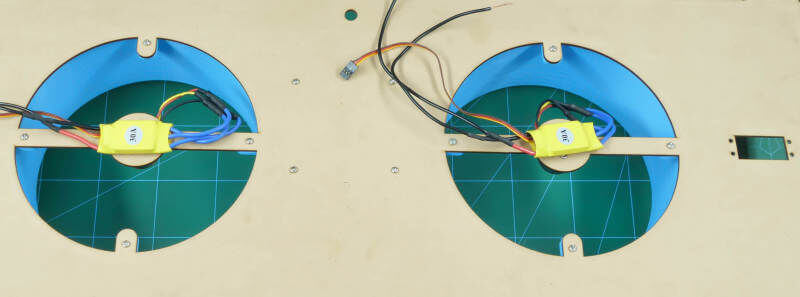

Теперь давайте добавим двигатели подъема. Мы собираемся добавить два подъемных механизма для обеспечения устойчивости судна на воздушной подушке. Закрепите два двигателя БДПТ в позициях 3 и 4 с помощью болтов M3 длиной 8 мм и гаек M3. После этого мы добавляем ЭРС или регуляторы скорости. Подключите два ЭРС к двум клеммам БДПТ. После подключения ЭРС закрепите их под платформой, используя кабельные стяжки, как показано на фото выше.
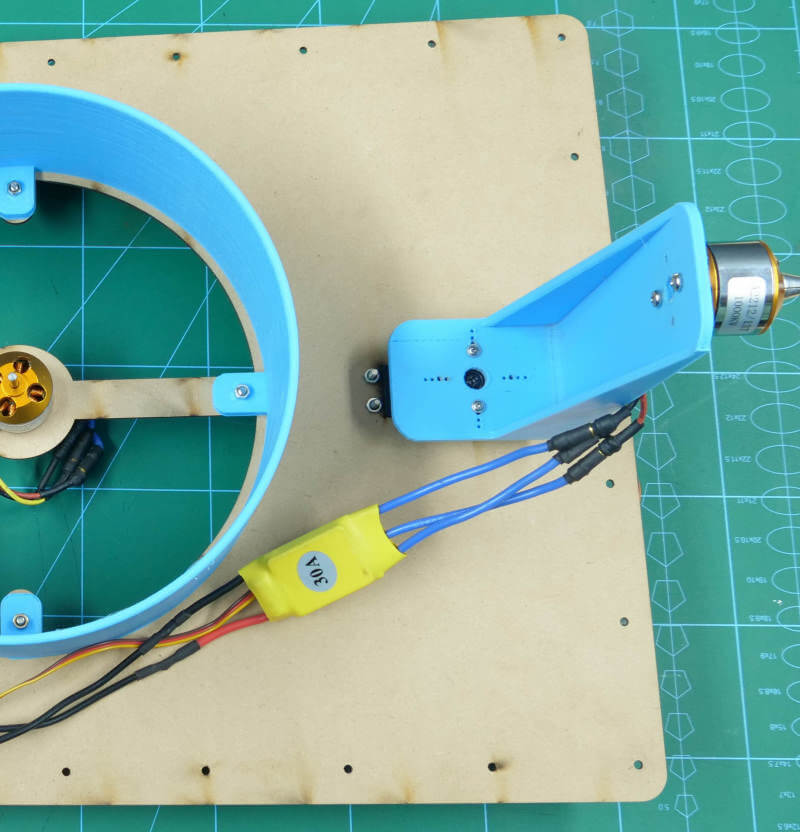
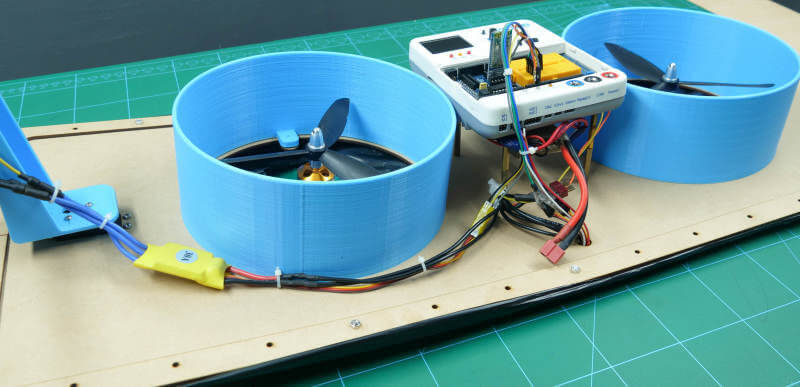
Шаг 6: Собираем рулевое управление
Мы собираемся добавить рулевое управление, чтобы наше судно могло легко поворачивать, и делать это тогда, когда нам нужно. Для этой же цели мы собираемся использовать металлический сервопривод.
Примечание: прежде чем использовать сервопривод, давайте сначала зададим ему угол. Подключите металлический сервопривод к любому сервоканалу evive. Теперь включите evive, выберите элементы управления, выберите сервоприводы, наконец выберите сервоканал, к которому вы подключили сервопривод, и установите угол на 90 градусов с помощью потенциометра.
После этого закрепите сервопривод в отверстии 6 с помощью болтов М3 длиной 12 мм и гаек М3. Это была основа для рулевого управления, давайте добавим рулевое управление. Прикрепите 4-сторонний серво-рычаг к напечатанному в 3D-рулевому с помощью самонарезов.
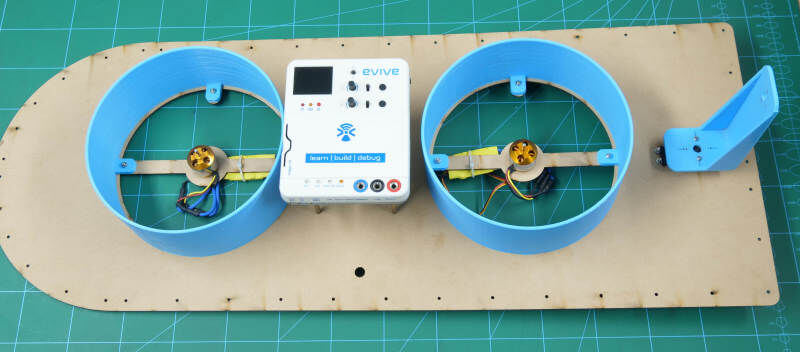
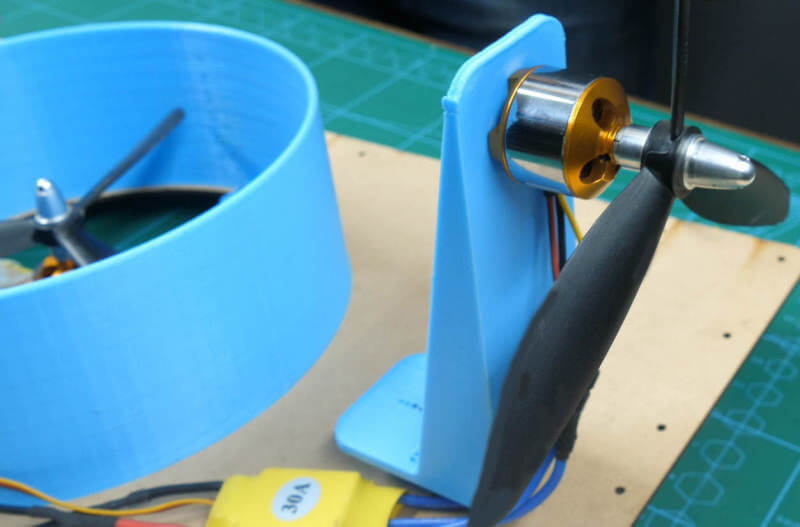
Шаг 7: Создание тягового двигателя
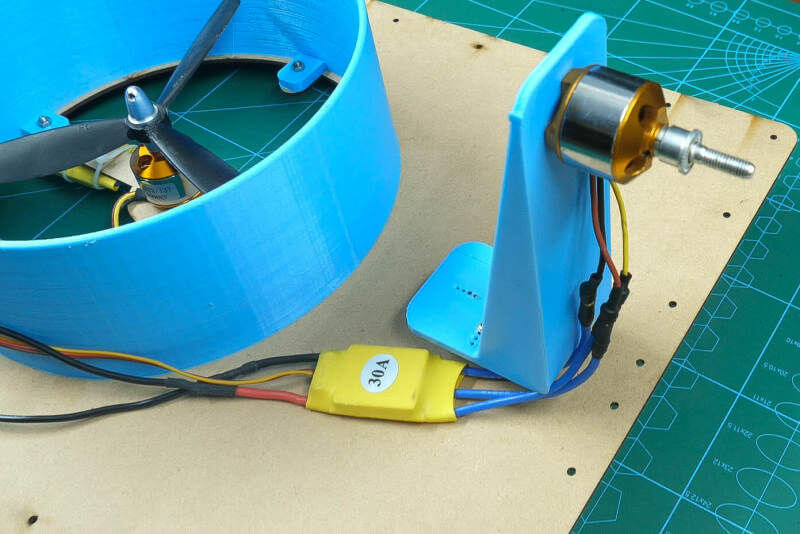
Давайте добавим двигатель тяги. Этот двигатель будет двигать наше судно вперед. Мы будем использовать еще один двигатель БДПТ. Возьмите двигатель БДПТ и зафиксируйте его в отверстиях на 3D-распечатанном рулевом управлении с помощью болтов M3 длиной 8 мм.
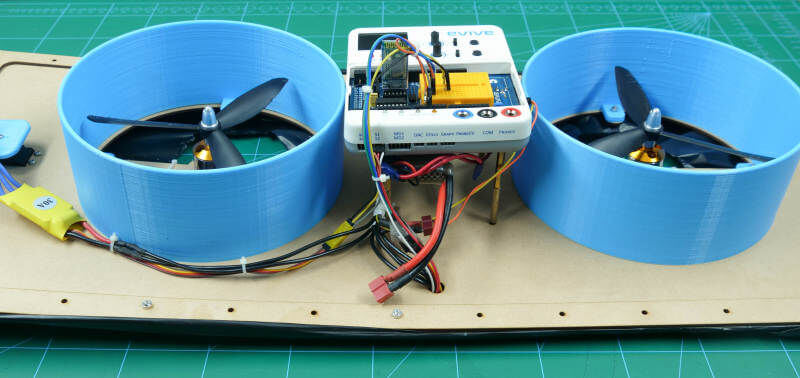
Шаг 8: Подсоединяем провода
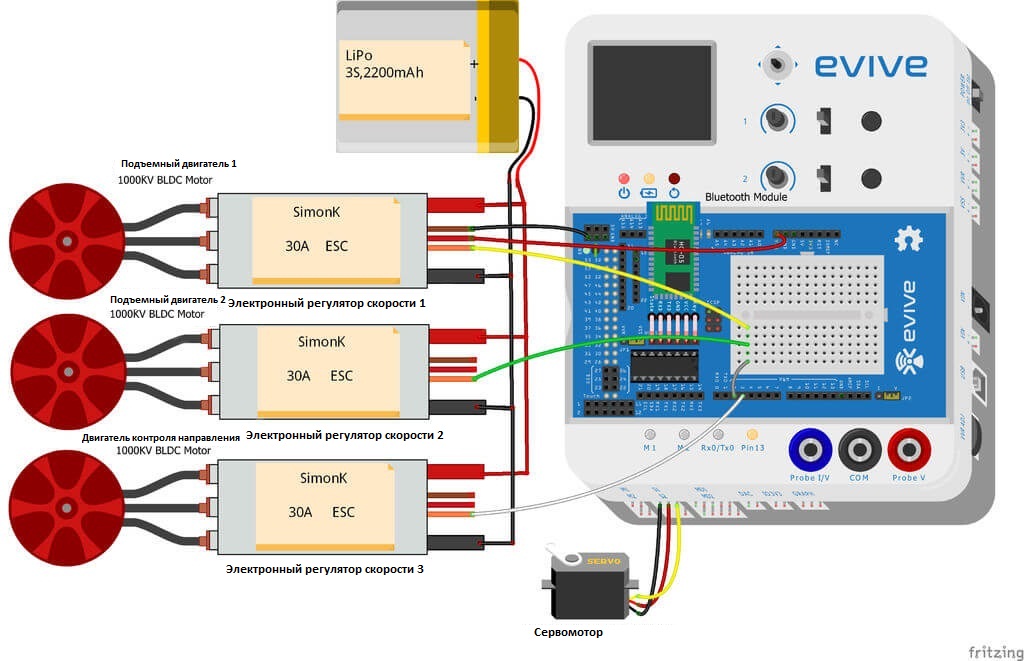
Время подсоединять провода. Вытяните все провода и пропустите их через отверстие 7 и перенесите их на платформу, чтобы подсоединить к evive. После этого выполните следующие подключения:
1. Подсоедините клемму + разъема литий-полимерной батареи к толстому красному проводу каждого ЭРС.
2. Подсоедините клемму — разъема литий-полимерной батареи к толстому черному проводу каждого ЭРС.
3. Теперь возьмите подъемный двигатель 1 и подключите 3 его провода к 3 проводам, полученным на выходе ЭРС 1.
4. Аналогичным образом соедините подъемный двигатель 2 и тяговый двигатель с их соответствующими ЭРС.
5. Подключите сервомотор рулевого управления к порту S1 на evive.
6. Теперь возьмите ЭРС1 и подключите его сигнальный контакт к цифровому контакту 2 evive.
7. Аналогичным образом подключите сигнальный контакт ЭРС 2 к цифровому контакту 2 evive.
8. Теперь возьмите провода VCC и ЗЕМЛЯ от любого из ЭРС и подключите их к VIN и ЗЕМЛЕ evive соответственно (на VIN подать + питания).
9. Подсоедините сигнальный контакт ЭРС 3 к цифровому контакту 3 evive.
10. Наконец, подключите модуль Bluetooth HC-05 к соответствующему разъему на плате evive.
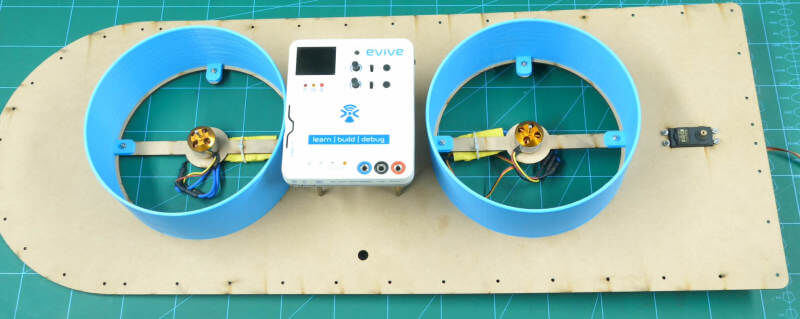
Шаг 9: Завершаем сборку двигателей
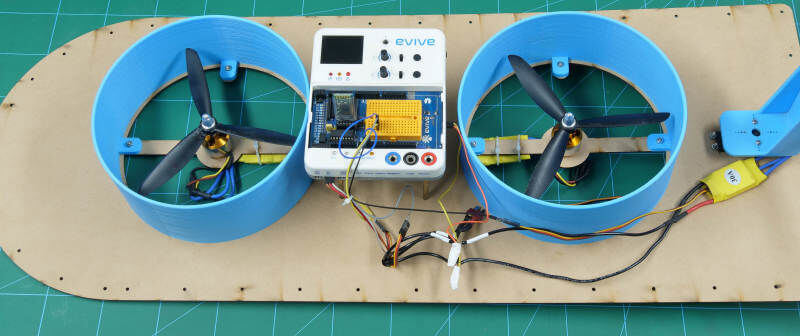
Все три двигателя почти готовы, чего не хватает? Пропеллеров. Возьмите пропеллеры и установите каждый из них на двигатели БДПТ.
Шаг 10: Добавляем подушку
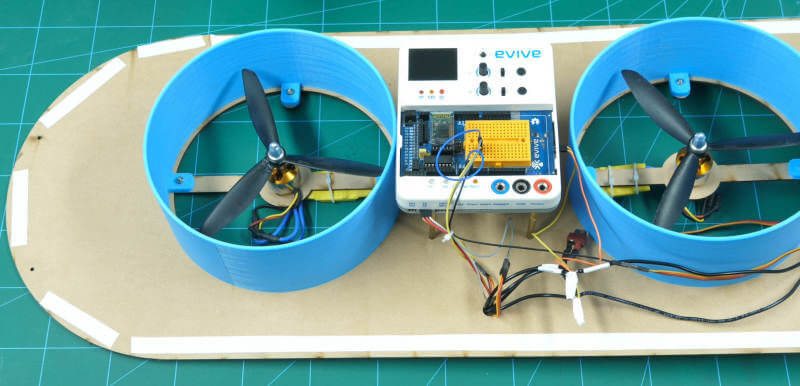
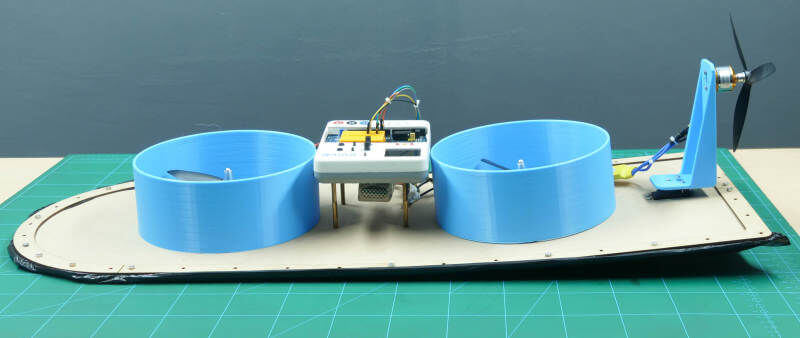
Подушка — самая важная и единственная часть судна, которая касается земли. Подъемные двигатели поднимают судно, когда двигатели БДПТ выталкивают воздух вниз, который, в свою очередь, сохраняется в подушке. Мы собираемся использовать большой пластиковый лист, чтобы сделать подушку. Убедитесь, что размер пластика немного больше размера платформы. Возьмите пластик и приклейте его к краям платформы с помощью двухсторонней клейкой ленты. Теперь нам нужно зафиксировать подушку. Таким образом, нам нужно поместить ее между верхней пластиной и платформой. Сначала проколите отверстия в пластиковом листе, а затем прикрепите к нему верхнюю пластину. Прикрепите болты M3 к платформе так, чтобы они были направлены вверх. Затем возьмите верхние пластины и совместите их с платформой и зафиксируйте их с помощью гаек M3.
Шаг 11: Включение судна
Последний шаг — включить evive, что, в свою очередь включит наше судно на воздушной подушке. Также нам понадобится много энергии, чтобы наше судно могло зависать. Для этого мы собираемся использовать литий-полимерный аккумулятор. Подключите батарею к evive, как указано в разделе о подключении. На этом вся наша сборка судна на воздушной подушке завершена.
Шаг 12: Регулировка
Самая важная … самая важная часть всей сборки состоит в том, что двигатели подъема должны принудительно выбрасывать воздух вниз, а тяговый двигатель должен отбрасывать воздух назад. Если какой-либо из двигателей не работает должным образом, мы должны поменять местами соединения. Во всех трех двигателях БДПТ есть три провода; нужно поменять местами любые два провода, и двигатели будут работать отлично.
Шаг 13: Работа летающего судна
Основной механизм судна на воздушной подушке очень прост: наш мозг- evive активирует все двигатели судна на воздушной подушке с помощью литий-полимерной батареи. Подъемные двигатели используются для поднятия судна на воздушной подушке над землей, когда пропеллеры выбрасывают воздух вниз в подушку. Подушка затем удерживает воздух, поднимая все судно вверх. Тяговые двигатели отбрасывают воздух назад, заставляя судно двигаться вперед. Рулевой сервопривод используется для изменения направления движения судна.
Как вы уже знаете, мы будем использовать наш смартфон для управления судном на воздушной подушке, и для того же мы будем использовать Dabble.
Шаги для беспроводного управления судном на воздушной подушке с помощью смартфона приведены ниже:
1. Откройте приложение Dabble.
2. Найдите свой конкретный модуль Bluetooth и подключите его.
3. Откройте модуль Gamepad.
4. Нажмите кнопку «СТАРТ» на геймпаде, чтобы запустить двигатели подъема на воздушной подушке.
5. Нажмите кнопку «ВВЕРХ», чтобы запустить вентилятор рулевого управления.
6. Нажмите кнопку «ВЛЕВО», чтобы повернуть налево.
7. Нажмите кнопку «ВПРАВО», чтобы повернуть направо.
8. Вам нужно снова нажать кнопку «СТАРТ», чтобы остановить подъемные двигатели.
Шаг 14: Графический код
Для того, чтобы легко запрограммировать наше транспортное средство, мы собираемся закодировать его с помощью графического програмного обеспечения PictoBlox.
Основной блок используется для подключения смартфона с помощью Dabble и вызова необходимых блоков, когда условие в режиме if выполнено.
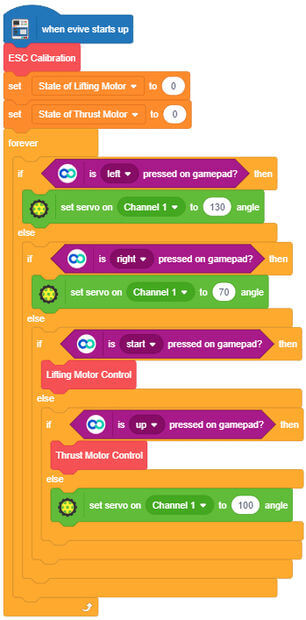
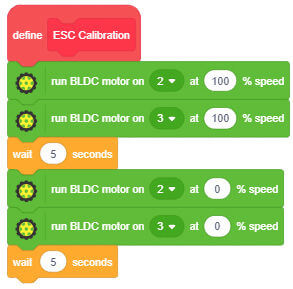
Этот блок калибрует ЭРС (электронный регулятор скорости).
Этот блок будет управлять подъемными моторами (запуск или остановка).

Этот блок будет управлять тяговыми двигателями (запуск или остановка).

Шаг 15: Код Arduino
Вы даже можете загрузить следующий код Arduino для evive.
Шаг 16: Вывод
Ваше управляемое смартфоном транспортное средство на воздушной подушке готово для того, чтобы скользить вокруг. Все, что нужно, это команда от Dabble! 😉
Обзор сделан для сайта https://modelist-konstruktor.com/
Рекомендуем почитать
 ТЕПЕРЬ НЕ СОСКОЧИТ
ТЕПЕРЬ НЕ СОСКОЧИТ
Существует много способов закрепления бойка молотка на деревянной ручке так, чтобы он со временем не соскакивал во время ударов. Вот ещё один простой приём: в дополнение к обычному... Инструмент для сбора ежевики из дерева и велосипедных спиц
Инструмент для сбора ежевики из дерева и велосипедных спиц
Превратите свои походы за ягодами в настоящее удовольствие с помощью этого оригинального инструмента для сбора ежевики, сделанного из переработанной древесины и велосипедных спиц. Это не...