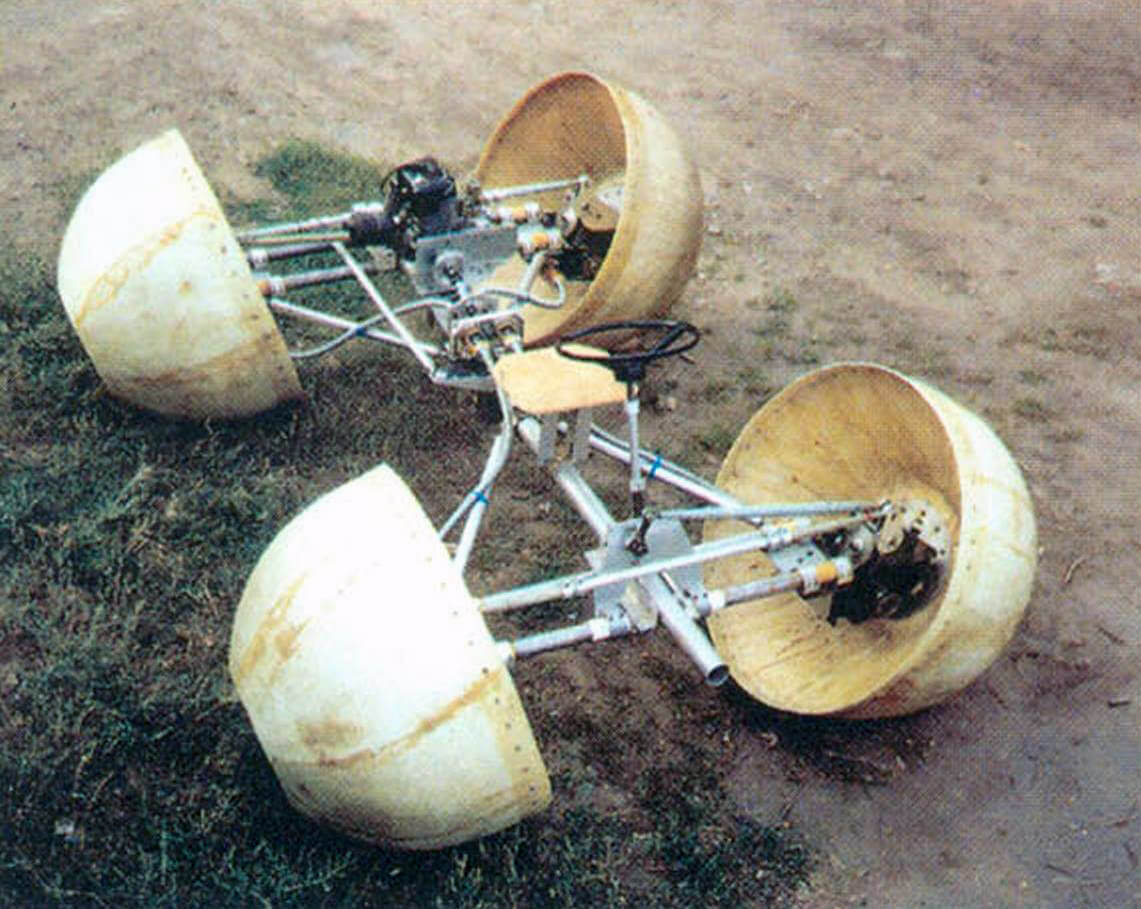
Созданное мною вездеходное транспортное средство (разработана конструкция и изготовлен действующий макет) предназначено для передвижения в условиях полного бездорожья. Вездеход имеет двухсекционную сочлененную раму и колеса в форме полусфер. Повороты производятся за счет одновременного «перелома» рамы и наклона обеих осевых пар колес, а потому маневренность вездехода почти такая же, как и у гусеничных машин.
Но главное достоинство, обеспечивающее вездеходность машины, — постоянный бездифференциальный привод на все колеса даже на поворотах на твердом грунте. При этом угловые скорости всех колес — одинаковые, но диаметры обкатки внутренних и внешних (относительно центра поворота) — различные, за счет их формы.
Данный вездеход является уникальным транспортным средством, предназначенным для передвижения по самым сложным бездорожным условиям. Его конструкция и привод обеспечивают высокую маневренность и проходимость, а также позволяют преодолевать препятствия, которые не под силу другим транспортным средствам.
Двухсекционная сочлененная рама и колеса в форме полусфер делают вездеход гибким и маневренным. Он способен проехать по неровной поверхности, преодолевать водные преграды, подниматься на горы и спускаться с них, не задумываясь о повреждениях. Такое устройство подвески также позволяет снизить вибрацию и улучшить управляемость вездехода.
Система поворотов, основанная на одновременном «переломе» рамы и наклоне обеих осевых пар колес, позволяет быстро и точно изменять направление движения. Эта система, совмещенная с постоянным бездифференциальным приводом на все колеса, обеспечивает высокую маневренность вездехода и позволяет ему справляться с любыми поверхностями.
Главным достоинством вездехода является его постоянный бездифференциальный привод на все колеса, который обеспечивает равномерную передачу мощности и тяги на все колеса даже на поворотах на твердом грунте. Это значительно увеличивает проходимость и способность вездехода к передвижению по сложным поверхностям. Кроме того, угловые скорости всех колес равны, что обеспечивает более точное управление вездеходом.
Это позволяет вездеходу держать устойчивость на любой поверхности, включая снег, грязь и неровности. В то же время, такой привод обеспечивает эффективное распределение мощности на все колеса, что увеличивает проходимость и уменьшает вероятность застревания в труднодоступных местах.
Кроме того, вездеход оборудован мощным двигателем, который способен развивать большие скорости на прямых участках и подниматься по крутым склонам. Также на машине установлена система независимой подвески, что обеспечивает более плавное передвижение на неровной местности и снижает нагрузку на колеса.
В общем, вездеходное транспортное средство, разработанное мной, представляет собой универсальный и надежный способ передвижения в условиях бездорожья. Благодаря своим техническим характеристикам, такой вездеход может использоваться в различных областях, включая исследование труднодоступных территорий, грузоперевозки, а также военные операции.
С. КАЧАНОВ-СОРОКИН, г. Омск
Рекомендуем почитать
 Из «Явы» — две «Явы»
Из «Явы» — две «Явы»
В распоряжении картингистов довольно часто оказываются мотоциклетные двигатели чехословацкого производства «Ява», имеющие рабочий объем цилиндра 50 см3. Пользуясь приведенными чертежами...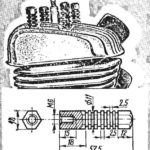 ГАЙКА-«РАДИАТОР»
ГАЙКА-«РАДИАТОР»
Для крепления головки цилиндра двухтактного двигателя мотоцикла и мотокультиватора я уже несколько лет применяю специальные длинные гайки. Благодаря им узел разбирается в считанные...