
 Появление в Вооруженных Силах СССР вертолета Ми-4 грузоподъемностью 2000 кг, первоначально предназначавшегося для транспортировки десантников, сразу привлекло внимание как многочисленных силовых структур, так и ГВФ. Не стал исключением и Военно-Морской Флот. Перед ним открывалась широкая перспектива по использованию Ми-4 не только для доставки десантников, но и для выполнения поисково-спасательных операций на море, траления мин, поиска подводных лодок (угроза от которых постоянно возрастала) и в качестве торпедоносца.
Появление в Вооруженных Силах СССР вертолета Ми-4 грузоподъемностью 2000 кг, первоначально предназначавшегося для транспортировки десантников, сразу привлекло внимание как многочисленных силовых структур, так и ГВФ. Не стал исключением и Военно-Морской Флот. Перед ним открывалась широкая перспектива по использованию Ми-4 не только для доставки десантников, но и для выполнения поисково-спасательных операций на море, траления мин, поиска подводных лодок (угроза от которых постоянно возрастала) и в качестве торпедоносца.
Первым в 1953 г. создали противолодочный Ми-4М (встречаются обозначения Ми-4ВМ, ВМ-12). В отличие от сухопутного Ми-4 А, на противолодочном вертолете установили радиолокатор СПРС-1 («Курс-М»), предназначенный для поиска подводных лодок, находившихся как в надводном, так и в погруженном (под перископом) положении, комплектом из 18 радиогидроакустических буев РГБ-Н «Ива», опускаемый с помощью ручной лебедки магнитометр АПМ-56, оптический прицел ОПБ-1С и до 100 противолодочных бомб ПЛАБ-МК. Штурмана-оператора РЛС расположили в подфюзеляжной гондоле. На борту имелся аэрофотоаппарат АФА-БА21С.
Ми-4М прошел государственные испытания и рекомендовался к серийному производству после устранения выявленных дефектов. С 1957 по 1958 год завод № 387 в Казани построил 76 вертолетов противолодочной обороны Ми-4М. Надо сказать, что проку от этих машин было мало. На них фактически отрабатывались различные методики по поиску субмарин вероятного противника, готовились кадры для последующих более совершенных противолодочных вертолетов.
Для этого, как рассказал А.М.Артемьев, на первых Ми-4М выпуск и уборка гондолы с магнитометром осуществлялись с помощью ручной лебедки. Для этого штурман должен был, получив разрешение командира экипажа, перейти в грузовую кабину, установить на лебедку рукоятку и, считая обороты, выпустить гондолу, контролируя ее спуск по меткам на кабель-тросе. Затем следовало подсоединить электрический разъем кабеля магнитометра. Лишь после этого начинался поиск подводной лодки. Все это, включая подъем магнитометра, занимало много времени и требовало значительных физических усилий. Скорость полета вертолета с выпущенной гондолой не должна была превышать 130 км/ч.
Для поиска надводных объектов, в том числе и подводных лодок, двигавшихся под перископом с устройством для работы двигателя под водой (РДП) у береговой черты, предназначалась весьма несовершенная РЛС СПРС-1. Дальность обнаружения подводной лодки в таком положении при штиле, судя по результатам испытаний локатора, не превышала 20 км. Однако штилевая обстановка на море — это идеальный случай, в действительности, уже при волнении моря около 3 баллов дальность обнаружения субмарин не превышала 5 км. СПРС-1 имела и другой недостаток — очень ограниченный сектор обзора и только вперед. Причем при поиске подводной лодки угол сканирования радиолуча ограничивался 150 градусами, при пеленговании цели — не более 30 градусов в горизонтальной плоскости. Имелись трудности и с опознаванием на экране береговой черты.
Начиная с 1957 г. вертолеты Ми-4М организационно оформлялись в отдельные эскадрильи базовых вертолетов ПЛО. В том же году в соответствии с июльским 1958 г. постановлением правительства противолодочный Ми-4М оборудовали гидроакустической станцией «Рион», но дальше опытов дело не пошло.
Спустя два года на базе серийной машины построили и в октябре предъявили на государственные испытания усовершенствованный базовый вертолет противолодочной обороны Ми-4М с РЛС «Рубин-В», иногда обозначаемый как Ми-4МР. В связи с заменой радиолокатора СПРС-1 на «Рубин-В» перенесли в другое место приемники воздушного давления — датчики измерения скорости полета, рулежные и посадочные фары. Кроме стандартного набора пилотажнонавигационного и связного оборудования, винтокрылую машину оснастили комплектом радиогидроакустических буев РГБ-Н (до 18 штук) — основными средствами поиска субмарин, вспомогательным магнитометром АПМ-56 с электролебедкой ЛПГ-1, а также аэрофотоаппаратом АФА-БАФ21.
Как и на предшественнике, штурман располагался в подфюзеляжной гондоле с устройством аварийного сброса. В итоге всех доработок пустой вертолет потяжелел на 130 кг и в итоге уменьшилась полезная нагрузка.
Для борьбы с подводными лодками предусмотрели, в частности, бомбы МПЛАБ-100, ФАБ-500М-46, ПЛАБ-5 00-300, ФАБ250МУ и ОФАБ-100М. Максимальная бомбовая нагрузка составляла для этого варианта до 1000 кг.
Ведущими на этапе государственных испытаний были инженер П.Захарченко и летчик В.Калихин. Испытания Ми-4М, завершившиеся весной 1960 г., показали, что машина практически соответствовала техническим условиям на поставку вертолетов в 1959 г. и тактико-техническим требованиям ВВС и промышленности, предъявлявшимся к РЛС.
Достаточно сказать, что РЛС «Рубин-В» после непродолжительной доводки по надежности работы значительно превзошла СПРС-1. Сектор ее обзора вперед возрос до 250 градусов, хотя задняя полусфера из-за установленной биологической защиты по-прежнему не просматривалась. Станция «Рубин-В» позволяла уверенно обнаруживать береговую черту и крупные города на расстоянии 240 — 260 км, военно-морские базы — на 150 км и более, что в совокупности с имевшимся радионавигационным и связным оборудованием позволяло летать в сложных метеоусловиях днем и ночью, но при установленном для Ми-4 погодном минимуме. Надводные корабли типа эскадренного миноносца обнаруживались на удалении 150 км, а подводные лодки, находившиеся на перископной глубине и двигавшиеся с использованием устройства РДП, — на расстоянии около 28 км.
Ми-4МР, хотя и рекомендовался для принятия на вооружение в качестве вертолета противолодочной обороны, все же требовал некоторой доводки.
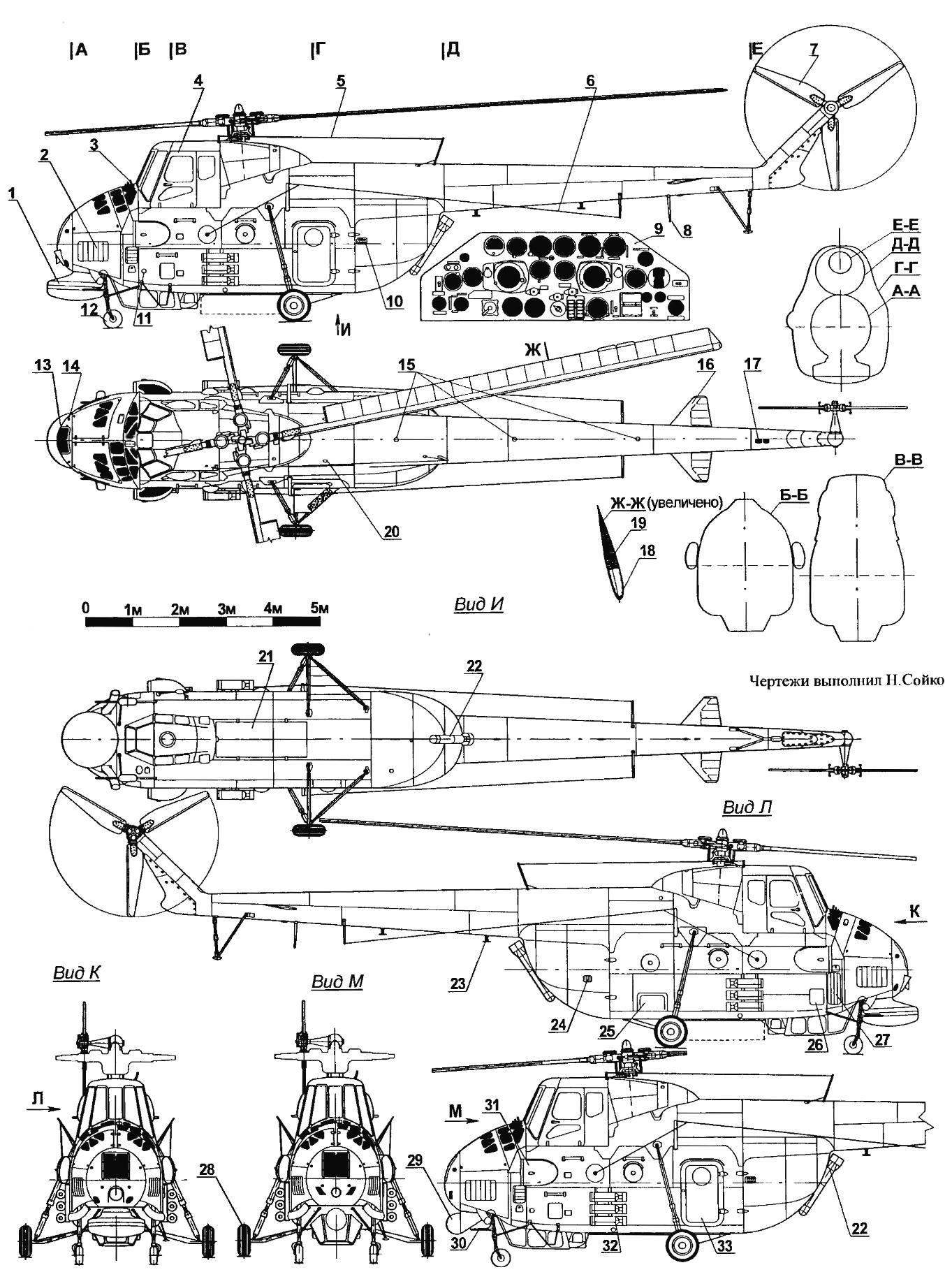
Вертолет Ми-4М:
1—обтекатель антенны РЛС «Рубин-В»; 2—регулируемые створки капота; 3 — антенны системы госопознавания; 4 — сдвижная дверь; 5 — шлейфовая антенна радиокомпаса АРК-5; 6 — антенна КВ-радиостанции; 7 — рулевой винт; 8 — штыревая антенна радиостанции РСИУ-ЗМ; 9 — приборная доска опытного Ми-4М; 10—кассеты сигнальных ракет; 11—розетка аэродромного питания ШРАП-500; 12 — колесо 400×150 мм; 13 — воздухозаборник двигателя; 14— антенны системы госопознавания; 15 — строевые огни (фиолетовые); 16 — управляемый стабилизатор; 17 — жалюзи охлаждения промежуточного редуктора; 18 — лонжерон лопасти; 19—сотовый заполнитель; 20 — бортовой аэронавигационный огонь (красный); 21 — створки люка бомбоотсека; 22 — опускаемый буй ГАС; 23 — антенна радиовысотомера РВ-5; 24 — створки вентиляции грузовой кабины; 25 — бензощиток; 26 — люк аккумуляторного отсека; 27— регулируемые створки маслорадиатора; 28 — колесо 700×250; 29 — обтекатель РЛС «Курс-М»; 30—штанга ПВД; 31 —воздухозаборник; 32— авиабомбы ОМАБ-25-12Д; 33 — входная дверь
В марте 1961 г. части, оснащенные этими вертолетами и самолетами Бе-6, переименовали в противолодочные, в следующем году завод в Казани построил первые 10 Ми-4М с РЛС «Рубин-В».
Усовершенствованные машины дополнительно оснастили гидроакустической станцией, магнитометром АПМ-60 (принят на вооружение в 1960 г.) с большей дальностью обнаружения подводных лодок, по сравнению с АПМ-56 и автопилотом АП-31, но многие летчики не рисковали включать его в полете. Спустя два года вертолет приняли на вооружение. Особенностью противолодочного вертолета была отделявшаяся в аварийной ситуации кабина штурмана.
В том же году на основании декабрьского постановления правительства началась разработка экспортного варианта Ми-4МЭ, предназначенного для поставок в страны, дружественные СССР. Облик машины остался прежний, но состав оборудования существенно изменился. Вместо РЛС «Рубин» установили РБП-4Г, самолетный запросчик-ответчик СРЗО-2М поменяли на ответчик СРО-1 «Барий» опять же в экспортном исполнении. С машины сняли автопилот и часть бомбового вооружения.
Государственные испытания Ми-4МЭ завершились в марте 1964-го, и в том же году они стали покидать сборочный цех серийного завода. Экспортные Ми-4МЭ можно было встретить на аэродромах Польши и ГДР. В Германскую Демократическую Республику в 1965 — 1966 гг. поставили четыре противолодочных вертолета под обозначением Ми-4МА. Они находились в эксплуатации до 1977 г
На базе Ми-4М в 1963 г. построили первый отечественный вер-толет-торпедоносец Ми-4Т. С вертолета для облегчения сняли РЛС, противолодочное оборудование и автопилот. В фюзеляже разместили двустворчатый контейнер для противолодочной циркулирующей самонаводящейся торпеды АТ-1 с бомбодержателем, утепленный контейнер для радиогидроакустических буев РГБ-НМ «Чинара» и выдвижную антенну устройства СПАРУ-55, предназначавшегося для приема сигналов от них на удалении до 60 км. В связи с этим пришлось изменить конструкцию шасси.
Вертолет Ми-4Т мог использоваться не только в качестве торпедоносца, но и бомбардировщика. В дополнение к оптическому прицелу для дневного бомбометания ОПБ-1Р установили ночной НКПБ-7, обновили радиосвязное оборудование. При одинаковой с Ми-4М полетной массе за счет увеличения запаса горючего дальность полета вертолета возросла с 246 км до 500 км, а бомбовая нагрузка — с 246 до 520 кг.
В 1955 г. построили минный тральщик Ми-4БТ с надувным баллонетным шасси, допускавшим не только взлет и посадку, но и буксировку по воде.
Совершенно очевидно, что вероятность обнаружения, а тем более поражения субмарин с помощью Ми-4М и его более поздних модификаций оставляла желать лучшего.
Тогда же на Ми-4 провели ряд исследований, направленных на обоснование требований к противолодочным вертолетам и их оборудованию. В частности, исследовали возможность использования опускаемой гидроакустической станции (ГАС) АГ-19 «Клязьма», позволявшей определять направление источника шума, которая была принята на вооружение в 1959 г. Поскольку на Ми-4 имелось лишь колесное шасси, для пользования ГАС вертолет зависал в заданной точке над морем и опускал приемное устройство гидроакустической станции на расчетную глубину. В случае отсутствия шумов подводной лодки противника вертолет перелетал в другой район и поиск продолжался.
В начале 1960-х годов АГ-19 стали устанавливать на вертолеты, но она практически не использовалась. Причин для этого было несколько. Но самая большая трудность заключалась в удержании вертолета над выбранной точкой. Например, спуск машины ниже 18 — 20 м (ее определение осложнялось отсутствием радиовысотомера и происходило на глазок) приводил к забрызгиванию ее водой, а смещение в ту или иную сторону искажало направление источника шума. Да и дальность пеленгации оставляла желать лучшего.
Летные исследования показали, что в самых благоприятных гидрологических условиях дальность обнаружения дизельных подводных лодок, имевших ход 5 — 6 узлов и буксирующих за собой буй для увеличения шумности, не превышала 0,5 — 0,8 км. Многочисленные отказы гидроакустической станции, в том числе выход из строя приемного устройства, нарушение герметичности соединения кабель-троса станции и прочее, показали, что станция практически неработоспособна.
На вертолетах Ми-4 в опытных полетах, возможно, раньше, чем в некоторых других странах, проверялись способы приемки топлива от судов ВМФ на режиме висения. Для этого на танкере установили специальный заправочный узел, а на вертолетах — дополнительное оборудование для приемки топлива. Скорость перекачки его достигала 500 — 700 л/мин. Оригинальная разработка, к сожалению, не получила дальнейшего развития.
Краткое техническое описание Ми-4
Цельнометаллический вертолет Ми-4 выполнен по классической одновинтовой схеме. Коническая полумонококовая хвостовая балка круглого сечения имела отклоненную вверх балку хвостового винта.
Несущий винт — четырехлопастный, с шарнирным креплением лопастей и фрикционными демпферами. С 1960 г. выпускался с цельнометаллическими лопастями прямоугольной формы в плане.
Трехлопастный рулевой винт диаметром 3,6 м имел деревянные лопасти трапециевидной формы в плане.
Трансмиссия включала три редуктора: главный — с муфтой свободного хода, промежуточный и рулевого винта, соединительные валы и тормоза несущего винта. Скорость вращения вала несущего винта на взлетном режиме 198 об/мин, на номинальном режиме 178 об/мин.
Силовая установка состояла из поршневого двухрядного звездообразного 14-цилиндрового двигателя АШ-82B взлетной мощностью 1700 л.с. с принудительным воздушным охлаждением. Мотор размещался в носовой части фюзеляжа, по бокам которого установлены воздухозаборники системы воздушного охлаждения.
Топливо заливалось в мягкий протестированный бензобак емкостью 1000 л, располагавшийся в центральной части фюзеляжа. Для перегоночных полетов в грузовой кабине устанавливается дополнительный бак емкостью 275 л. Маслосистема состоит из одного маслобака емкостью 65 л и маслорадиатора, охлаждаемого воздухом от вентилятора двигателя.
Система управления вертолетом имела гидроусилители во всех четырех каналах с пружинными загрузочными механизмами.
Шасси — четырехопорное, неубирающееся с масляновоздушными амортизаторами и тормозными колесами размерами 700×250 мм. Передние опоры с самоориентирующимися колесами размерами 400×150 мм, на конце хвостовой балки снизу размещена предохранительная хвостовая опора с воздушным амортизатором.
Экипаж вертолета состоял из 3 — 4 человек.
Основные характеристики вертолета Ми-4МР
Длина, м…………………………………………………………………..25,02***
Высота, м………………………………………………………………………5,18
Диаметр несущего винта, м………………………………………………21
Взлетная масса, кг:
нормальная…………………………………………………………………7273
перегрузочная……………………………………………………………..7800
Масса пустого, кг………………………………………………………….6153
Скорость максимальная, км/ч………………………………………..185*
Динамический потолок, м……………………………………………..5000
Время набора высоты 3000 м, мин ………………………………….16
Продолжительность полета, час.-мин………………………….2-52**
*С нормальной полетной массой. **На высоте 1000 м. С дополнительным бензобаком в фюзеляже продолжительность полета 5-35. ***С вращающимися винтами.
Н. ЯКУБОВИЧ
Рекомендуем почитать
 РЕЛЕ ПОВОРОТА
РЕЛЕ ПОВОРОТА
Эксплуатируя мотоцикл «Тула» (ТМЗ-5.952), столкнулся с неприятным явлением. При включении указателей поворота они начинали сигналить не сразу, а с задержкой в пару секунд. Виной всему... ДВУХМОТОРНЫЙ ЭЛЕКТРОЛЕТ
ДВУХМОТОРНЫЙ ЭЛЕКТРОЛЕТ
Полеты кордовых «пилотажек» — прекрасное зрелище, в равной степени волнующее и спортсменов, и зрителей. Соответственно, среди авиамоделистов-кордовиков число приверженцев пилотажа весьма...