 Большинство машин и механизмов, используемых в промышленности, сельском хозяйстве и в сфере обслуживания, сами по себе, к сожалению, еще не работают. Эти механизмы приходится включать, выключать, менять их скорость и направление движения и т. д., то есть необходимо управлять их работой.
Большинство машин и механизмов, используемых в промышленности, сельском хозяйстве и в сфере обслуживания, сами по себе, к сожалению, еще не работают. Эти механизмы приходится включать, выключать, менять их скорость и направление движения и т. д., то есть необходимо управлять их работой.
Чем дальше развиваются наука и техника, тем все больше человек стремится освободить себя от малопроизводительного и тяжелого физического труда. Подобная работа во все большом объеме перекладывается на машины. Но подчас и управление механизмами бывает связано с нелегкими физически сложными действиями; поэтому и появились самоуправляемые машины, автоматы и полуавтоматы, например, в авиации — «летчик-робот», автопилот, в связи — автоматические телефонные станции, в торговле — автоматы и еще многие «умные» машины (рис. 1). Все более широкое применение находят в технике принципы кибернетики, бионики, пневмоники, телемеханики. Разработкой таких механизмов заняты большие коллективы инженеров, ученых, так как именно механизация и автоматизация производственных процессов лежат в основе научно-технического прогресса, они являются базой мощного развития производства и производительных сил нашего общества.
Разрабатывая технические устройства, мы также попробуем решить некоторые задачи, связанные с выбором оптимальных принципов управления работой этих устройств.
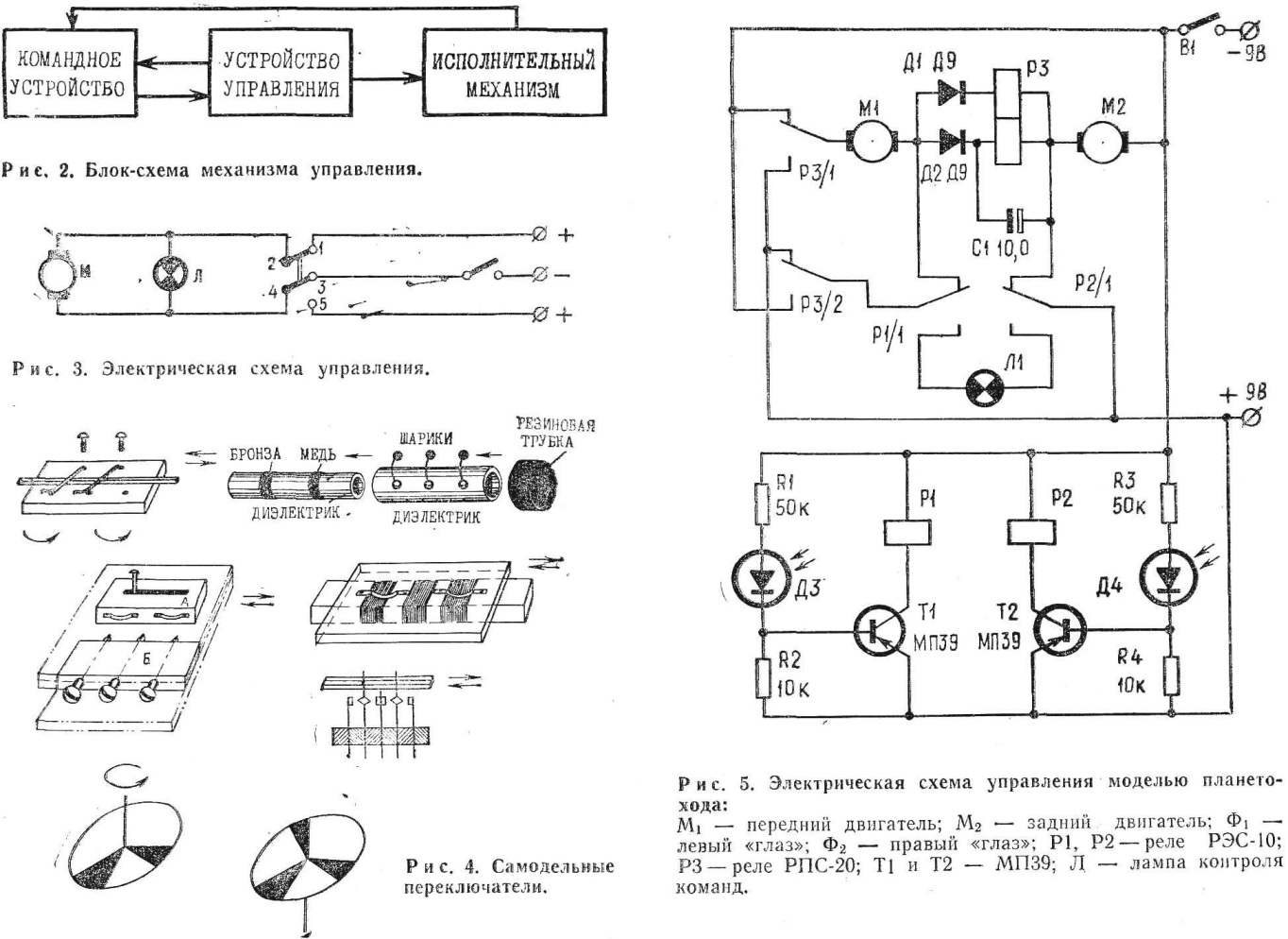
Построим блок-схему работы будущего механизма управления (рис. 2). Вначале нужно проанализировать работу блок-схемы, а затем и наметить принцип действия командного устройства.
Рассмотрим возможные ситуации, в которых придется трудиться нашим машинам.
Определим действия устройства, работающего в школьных мастерских, идея которого уже рассматривалась в журнале «Моделист-конструктор» (№ 9, 1974, стр. 47).
Движение механизма в этой мастерской возможно, например, по таким маршрутам:
А — от стола учителя вокруг рабочих столов учеников;
Б — от стола учителя между торцами рабочих столов учеников и обратно к столу учителя.
Каковы достоинства и недостатки этих маршрутов движения? Преимущество маршрута А состоит в том, что движение устройства осуществляется с постоянной скоростью и в одном направлении, то есть не меняется направление вращения вала двигателя. Его минус — сравнительно сложный и длинный путь движения устройства, а следователь но, и продолжительность раздачи заготовок, деталей и т. д. Кроме того, при движении устройства по маршруту А нельзя полностью исключить возможность столкновения устройства с учеником.
Достоинством маршрута Б является, во-первых, более короткий путь движения. При этом ученики могут брать развозимые предметы одновременно с двух сторон, а это дает дополнительную экономию времени. Во-вторых, движение осуществляется по прямей, по безопасному пути, контролируемому учителем и учениками, и уменьшается возможность возникновения при этом аварийной ситуации.
У маршрута Б есть и недостаток: необходимость изменения направления движения на половине пути на 130°.
Вывод, думается, ясен: выбираем маршрут Б и вносим дополнительное уточнение: желательно предусмотреть возможность остановки устройства у каждого рабочего стола учеников по команде любого из них.
Логика работы устройства выглядит тек: учитель дает команду «движение», устройство перемещается по прямой, преходит между торцами рабочих столов учеников, затем возвращается к столу учителя и останавливается. При необходимости его можно остановить у любого из рабочих столов (в роли командного устройства выступает здесь учитель или ученик).
Определяем принцип работы механизма управления устройством. Поскольку всякая передача команд требует затраты энергии, необходимо вначале выбрать ее источник. Мы договорились, что это будет батарейка, поэтому нам проще всего в механизме управления использовать электричество. Управлять нашим устройством означает подавать команду: на движение, на изменение направления перемещения и остановку. Для изменения направления движения нашего устройства достаточно заставить вал двигателя вращаться в противоположную сторону, что достигается очень просто изменением направления тока с помощью переключателя. Для движения или остановки устройства достаточно включить или выключить электрическое питание двигателя.
Теперь наша задача сводится к составлению электрической схемы; ее компоненты — электродвигатель, переключатель, выключатель и источник постоянного тока. Для контроля включения устройства под напряжение можно использовать лампочку с цветным светофильтром или лампу-кнопку. Одна из возможных электрических схем управления устройством показана на рисунке 3.
Если у вас нет готового переключателя, предлагаем изготовить его самостоятельно. На рисунке 4 показано несколько вполне работоспособных конструкций самодельных переключателей.
Рассмотрим возможности управления действиями устройства на пришкольном участке (II вариант). Здесь рабочие ситуации могут быть самыми различными и очень часто меняться. Поэтому программировать их нецелесообразно. В этом случае одним из рациональных решений можно считать управление движением устройства на всем пути его следования, то есть непосредственно человеком. Это значит, что человек идет рядом с устройством и подает ему команды «движение» и «остановка». Электрическая схема при этом может быть аналогична предыдущей (см. рис. 3), но переключения осуществляются вручную.
При разработке механизма управления работой модели планетохода также необходимо прежде всего уточнить возможные ситуации, в которых ему придется работать. Рассмотрим некоторые из них.
I. Устройство доставили в грузовой ракете в какую-то удобную для посадки точку планеты, из которой планетоход должен совершать выходы в определенные пункты или по определенным маршрутам с целью сбора различной информации. По команде он должен вернуться обратно к ракете.
II. Планетоход совершает перевозки грузов от космического корабля до стационарной базы на планете. При подходе к базе устройство подает сигнал о прибытии.
III. Вызов планетохода, например, в аварийной ситуации. По команде из точки аварии планетоход движется к этой точке, при подходе к ней останавливается и ведет передачу информации на базу. Если попавшие в беду космонавты могут сами погрузиться на прибывший к ним планетоход, то он доставляет их на базу или на косvический корабль в зависимости от полученной команды.
Теперь оформим эти ситуации в таблицу и наметим действия, которые должна совершать модель планетохода в списанных ситуациях.
Командные сигналы могут подаваться в любой последовательности.
Определим принцип работы механизма управления моделью планетохода А. Поскольку модель должна различать направления командных сигналов, то по аналогии, например, со зрительной реакцией человека можно построить управление с помощью «глаз», которые воспринимают световые сигналы.
СИТУАЦИЯ — ДЕЙСТВИЯ МОДЕЛИ
I. Командных сигналов нет, питание включено. — Модель планетохода совершает круговое движение.
II. Командный сигнал слева. — Модель планетохода совершает поворот налево, пока источник сигнала не будет прямо по курсу.
III. Командный сигнал справа. — Модель планетохода совершает поворот направо, пока источник сигнала не будет прямо по курсу.
IV. Командный сигнал прямо по курсу. — Модель планетохода движется прямо.
V. Командный сигнал по курсу на определенном (регулируемом) расстоянии. — Модель планетохода останавливается и начинает передачу информации: источник командных сигналов найден.
Итак, рассмотрим вариант управления с использованием «глаз» и света. В зависимости от того, с какой стороны появляется сигнал (то есть освещается правый или левый «глаз»), срабатывает соответствующее реле. Подается питание на двигатель, и осуществляется поворот в сторону источника света, после чего движение идет прямо на источник сигнала, то есть обеспечивается ситуация II; III; IV. Если «глаза» модели планетохода «скосить» по курсу, то при приближении к источнику сигнала на определенное, заранее установленное расстояние оба «глаза» будут освещены одинаково. При этом сработают соответствующие реле, отключающие питание двигателей, и включится сигнал, информирующий о том, что источник командных сигналов найден (ситуация V).
Если источник света выключить, модель начинает искать новый источник сигналов — поворачивается вокруг оси (ситуация I). При подаче сигнала модель двинется к нему и т. д.
Последовательность работы может обеспечить предлагаемая схема (рис. 5).
Предлагаем вам продолжить разработку технических устройств, которые мы наметили ранее (см, «Моделист-конструктор» № 9, 1974).
ЛИТЕРАТУРА
Артоболевский И. И. Механизмы в современной технике. М., «Наука», 1971.
«Детская энциклопедия», т. 5, М., «Просвещение», 1965. Дмитренко А. Н. Электронная автоматика. М., Изд-во ДОСААФ, 1973.
Дьяков А. В. Радиоуправляемые модели. М., Изд-во ДОСААФ, 1973. Журналы «Моделист-конструктор», «Радио» за 1973, 1974 годы.
(Продолжение следует)
Рекомендуем почитать
 КАНОЭ ЗА 3 ДНЯ
КАНОЭ ЗА 3 ДНЯ
Эта самоделка началась еще давно, с книги «Каноэ за 6 часов», которую я никогда не читал. Интригующе, не правда ли? Суть в том, чтобы построить лодку из простых материалов и в короткий... КАЖДАЯ КОЛЯСКА МЕЧТАЕТ СТАТЬ АВТОМОБИЛЕМ!
КАЖДАЯ КОЛЯСКА МЕЧТАЕТ СТАТЬ АВТОМОБИЛЕМ!
...Валялась в бурьяне, на краю дачного участка старая коляска от мотоцикла К-750. За долгие годы от лакокрасочного покрытия не осталось и следа, кузов полностью покрылся коррозией, а...