Как-то попалось нам описание шестиколесного вездехода «джигер». Основные узлы его были предельно просты. Отсутствовали коробка передач, карданный вал, задний мост — эти, в общем-то, довольно сложные и тяжелые агрегаты. Небольшие двигатели — отдельно для левого и правого бортов — через клиноременный вариатор передавали крутящий момент своему ряду колес, соединенных цепью. Опоры осей пневмокатков жестко крепились к корпусу, а повороты осуществлялись за счет прибавления оборотов двигателя одного борта и уменьшения оборотов другого.
Нам захотелось создать свой шестиколесный вездеход, который был бы столь же прост в изготовлении и управлении.
В лаборатории конструирования малогабаритной техники КЮТа Новосибирского академгородка мы и построили такую машину (рис. 1), которая при некоторой внешней схожести во многом отличается от «джигера».
На нашем вездеходе (рис. 2) применен только один двигатель — мотоциклетный ИЖ-56 (от мотоколяски С3А, с генератором и стартером). Он расположен в задней части кузова машины. Запуск двигателя — от ручки в салоне с левой стороны водителя. В систему управления входят: рычаги поворотов, педаль сцепления, педаль газа, ручка переключения передач, ручка стартера, выключатель зажигания.
1 — резиновая подушка, 2 — двигатель, 3 — карбюратор, 4 — генератор, 5 — сиденье, 6 — цепь главной передачи, 7 — главная передача, 8 — механизм натяжения цепи, 9 — площадка крепления ступицы.
Крутящий момент двигателя через дифференциал (тоже от мотоколяски С3А) передается на средние колеса правого и левого бортов. Каждое такое колесо соединено цепной передачей с остальными колесами своего борта.
На средних же колесах установлены тормозные колодки от мотоколяски С3А. Служат они для… поворота машины, который осуществляется не рулевым колесом, а независимыми рычагами фрикциона, расположенными в кабине (см. рис. 3 и 7). Потянув левый рычаг на себя, тормозим три колеса левого борта. Двигатель продолжает вращать колеса правого борта, и вездеход поворачивает налево. Поворот направо аналогичен.
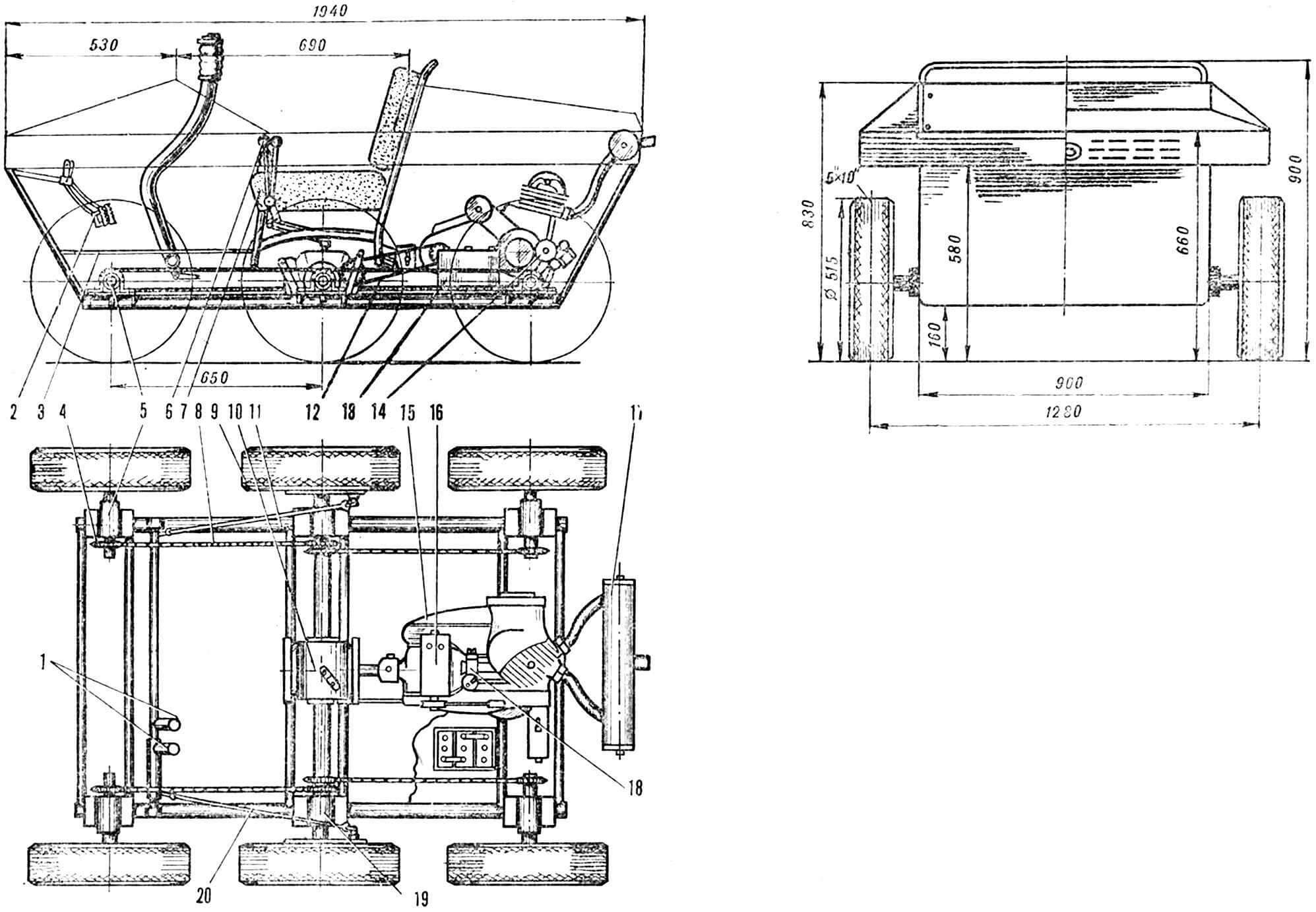
1 — рычаги поворотов, 2 — педали сцепления, газа, 3 — пол кабины, 4 — звездочки переднего колеса, 5 — ступица переднего колеса, 6 — рычаг переключения передач, 7 — сиденье, 8 — цепная передача, 9 — колесо, 10 — главная передача с дифференциалом, 11 — рама, 12 — цепь главной передачи, 13 — аккумулятор, 14 — стартер, 15 — двигатель, 16 — генератор, 17 — выхлопная труба и глушитель, 18 — карбюратор, 19 — ступица среднего колеса, 20 — тяга фрикциона.
При такой системе управления полностью отсутствует занос даже на крутых поворотах до 180° со скоростью 20—30 км/ч. Педаль тормоза для остановки автомобиля отсутствует, так как для торможения достаточно, предварительно выжав сцепление, потянуть на себя сразу оба рычага фрикционов. Управление коробкой передач двигателя осуществляется одной ручкой, которая находится на сиденье между водителем и пассажиром.
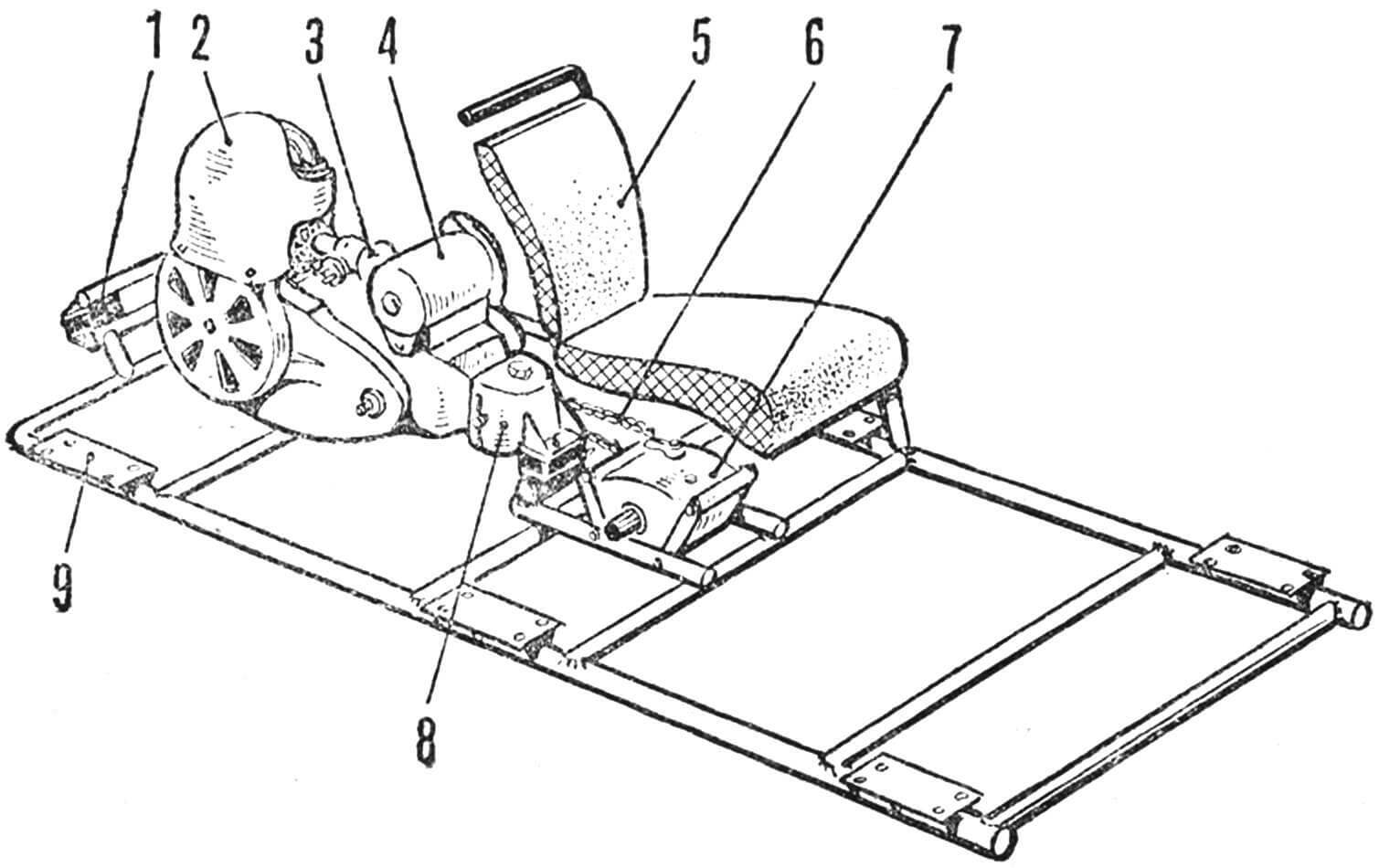
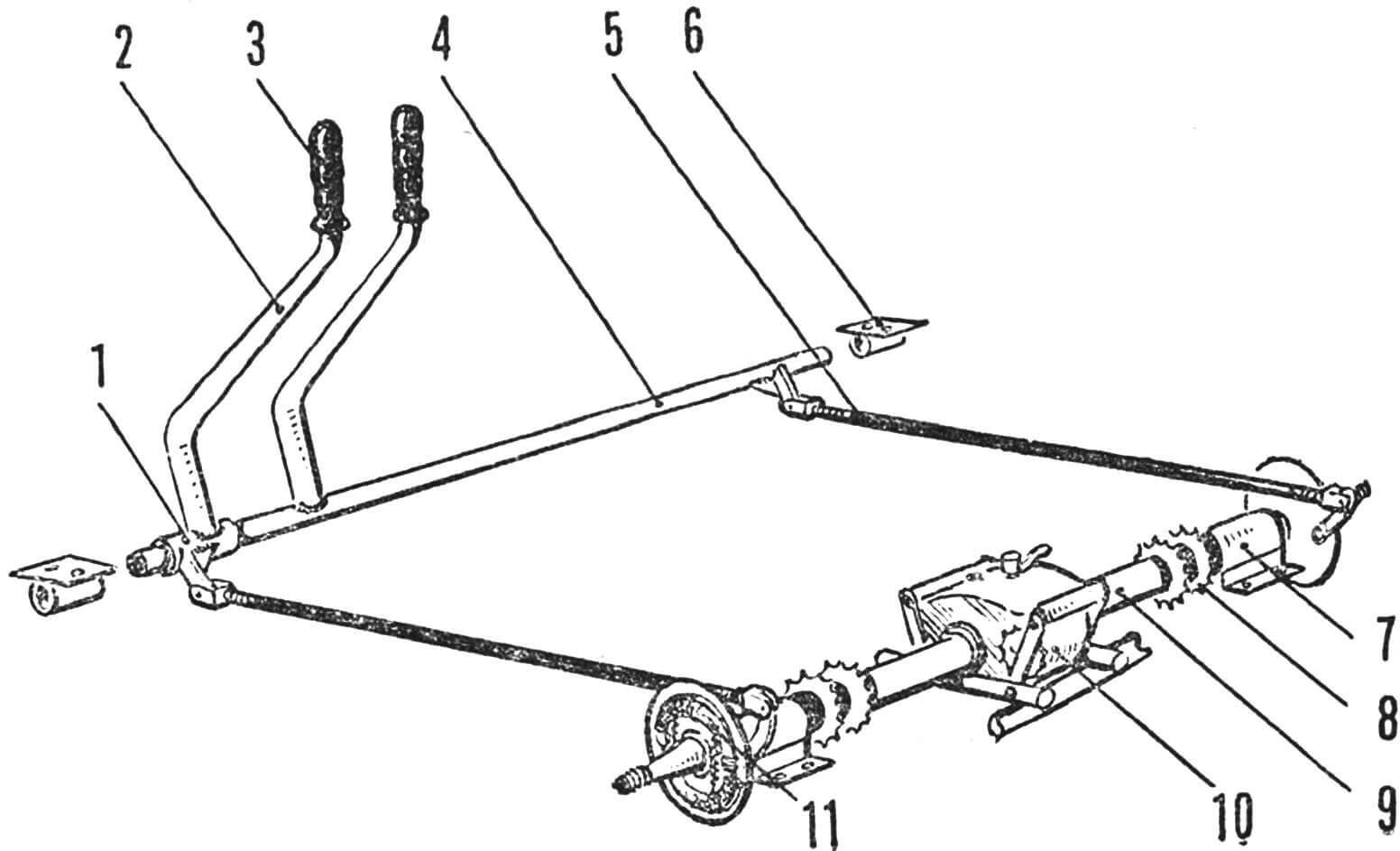
1 — звездочка, 2 — корпус ступицы, 3 — полуось, 4 — косынка, 5 — площадка, 6 — уголок, 7 — рама, 8 — болт М10.
Основа нашего вездехода — несущая прямоугольная рама, сваренная из труб Ø 40 мм. К раме приварены шесть площадок размером 120X140 мм, каждая с четырьмя отверстиями под болты М10 для крепления ступиц полуосей (рис. 4).
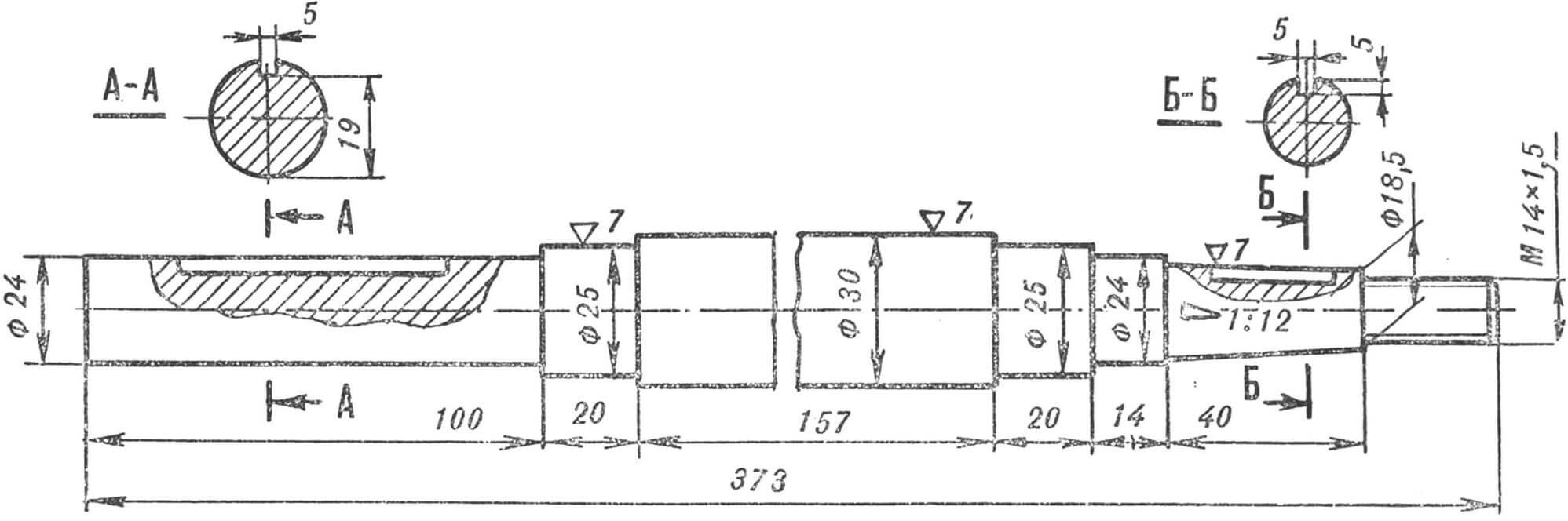
Ступицы передних и задних колес самодельные, из труб Ø 57 мм, расточенных с обоих концов для насадки подшипников № 205. В них вращаются укороченные, выточенные из стали Ст. 45 полуоси (рис. 5), на которые насажены и зафиксированы шпонками колеса. На другом конце каждой полуоси, тоже на шпонках, крепятся звездочки Z-19 от сельхозмашин, под «ижевскую» цепь. По бокам ступиц приварены уголки 35X35 мм с просверленными отверстиями — для крепления к площадкам болтами М10.
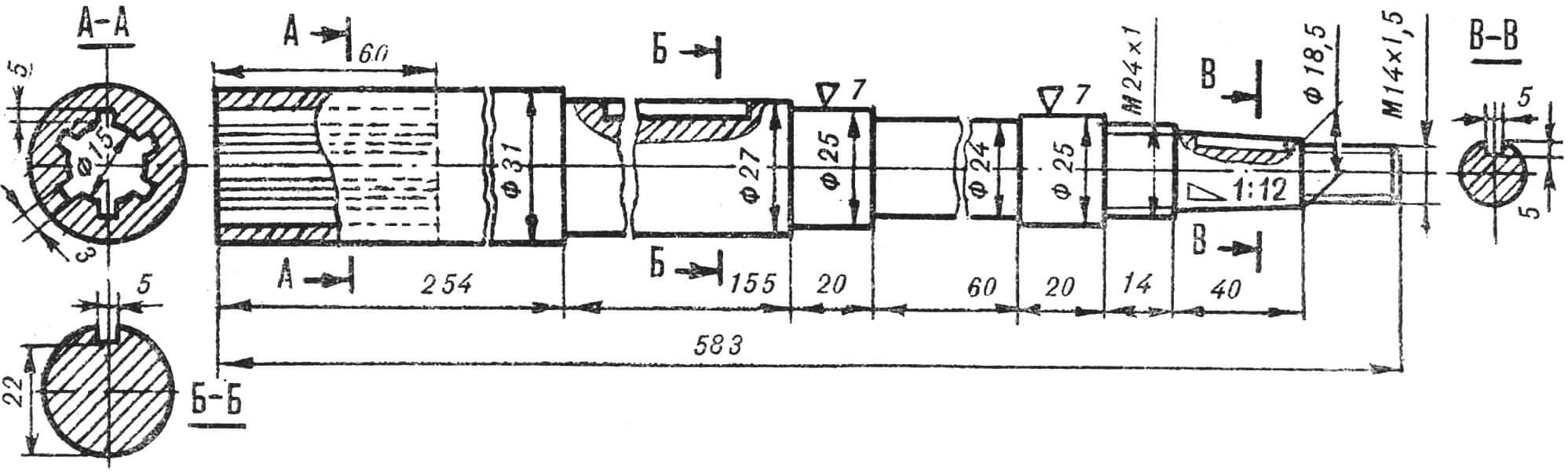
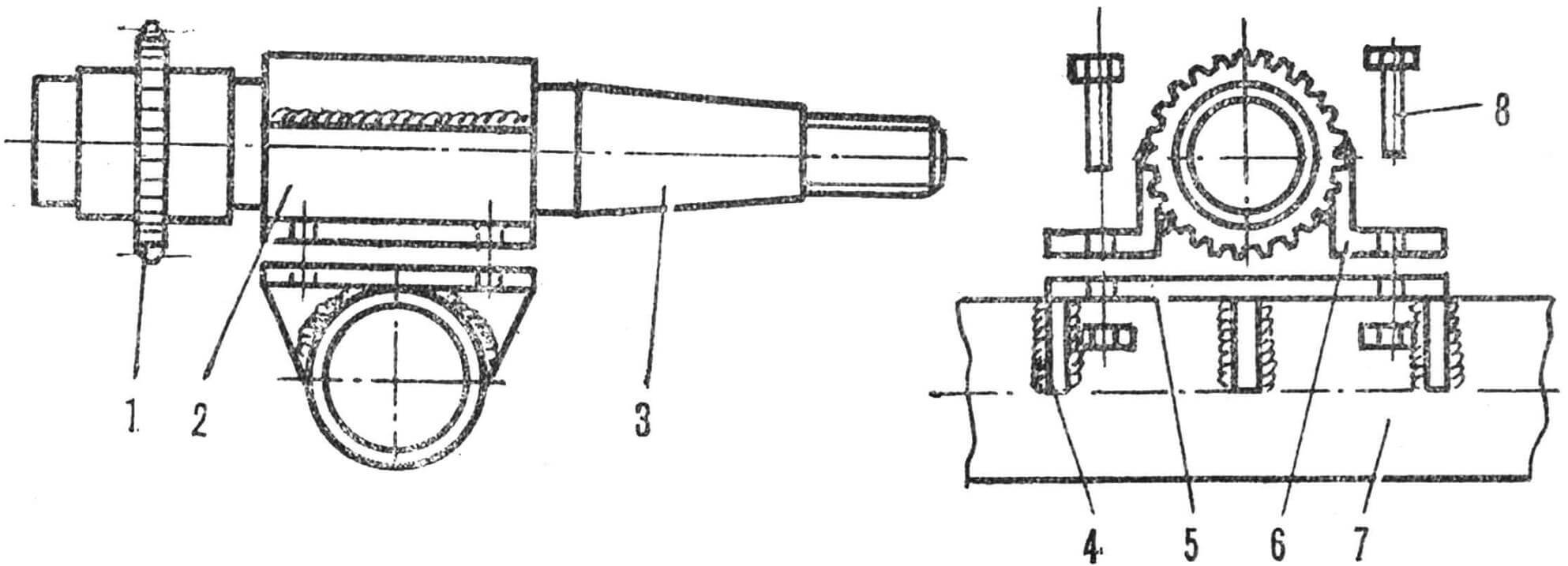
Средние ступицы использованы от заднего моста мотоколяски С3А. В них на конических подшипниках вращаются полуоси средних колес (рис. 6), выточенные из стали Ст. 45 и соединенные с концами конических шестерен дифференциала с помощью шлицев. На полуоси надеты и закреплены на шпонках сдвоенные звездочки Z-19 под «ижевскую» цепь от сельхозмашин.
Для крепления двигателя использована подмоторная рама от мотоколяски С3А, с предварительно обрезанной нижней частью — для крепления дифференциала. Обрезанный подрамник приварен к несущей раме, нижняя часть его с креплением для дифференциала тоже приварена к несущей раме (см. рис. 2).
Двигатель крепится на резиновых подушках, чтобы уменьшить передачу вибрации на кузов. Подушки расположены наклонно под углом 45°, что смягчает продольные рывки двигателя, смену нагрузок при движении.
1 — втулка, 2 — рычаг левого фрикциона, 3 — резиновая ручка, 4 — вал, 5 — тяга, 6 — подшипник вала, 7 — корпус ступицы, 8 — звездочки двойные, 9 — полуось, 10 — главная передача, 11 — тормозные колодки.
Крутящий момент от двигателя через цепную передачу передается на дифференциал, с него — на средние полуоси и далее через цепные передачи на передние и задние полуоси. Шесть колес нашего вездехода являются ведущими. Они взяты от мотоколяски С3А. Давление в них желательно поддерживать не более 0,8—1 кг/см2: для улучшения проходимости и смягчения толчков при движении на неровностях.
Каркас кузова, сваренный из труб Ø15 мм, обшит листовой сталью толщиной 1 мм. Кузов и несущая рама вместе составляют единую жесткую конструкцию.
Шестиколесный вездеход оказался удобным в управлении, маневренным и устойчивым на поворотах, показал высокую проходимость.
Техническая характеристика
Двигатель ИЖ-56, мощность, л. c. — 12
Охлаждение — воздушное, принудительное
Карбюратор — К-28Е
Аккумулятор — 6 В, 80 А/ч
Вес сухой, кг — 390
Полезная нагрузка, кг — 200
Габариты, мм:
ширина — 1440
высота — 900
Клиренс, мм — 160
Число колес (все ведущие) — 6
Привод колеса — цепь с шагом, мм — 15,88
Скорость максимальная, км/ч — 50
А. КИЖЕВАТОВ, член кружка конструирования малогабаритной техники КЮТ Новосибирского академгородка
Рекомендуем почитать
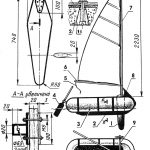 НАДУВНОЙ ШВЕРТБОТ-КРОХА
НАДУВНОЙ ШВЕРТБОТ-КРОХА
Предельная простота конструкции и ее полная разборность — эти два достоинства «карманного» швертбота, возможно, заинтересуют читателей журнала. В качестве корпуса я использовал детскую...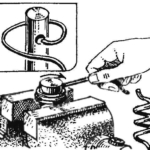 ВИТОК К ВИТКУ
ВИТОК К ВИТКУ
Изготовить потребовавшуюся срочно небольшую пружину — не проблема, если есть под рукой подходящая сталистая проволока. Для этого достаточно воспользоваться тисками и любым стержнем...