Голос мотоцикла или мопеда знаком каждому: резкий и частый, как пулеметная очередь, треск мотора вспарывает тишину, заставляя вздрагивать окружающих. А вредные последствия самих выхлопов! С ростом числа таких машин возрастает и степень отравления атмосферы отработавшими газами.
А вот другая картина: проезжая на моторной двухколесной машине по лесу, вы ничем не нарушаете его тихий покой, слышите не только пение птиц, но и стрекот кузнечиков, шорохи, словно едете на велосипеде. Потому что вместо «мото» к названию этих машин добавляется «электро»: нам предстоит привыкать к сочетаниям: электроцикл, электропед. На смену двигателю внутреннего сгорания идет электродвигатель.
Автономный электротранспорт для городских магистралей рождается в муках. Поиски, которые ведут во многих странах и фирмы, и отдельные энтузиасты, пока упираются в один и тот же тупик: источники питания, привод. Конструкции, создаваемые по аналогии с применяющимися в производственных помещениях, будучи «вытащенными» на улицы, напоминают рыбу на суше — они тоже по-своему «задыхаются» от нехватки электроэнергии, мощности, необходимой скорости. Ведь разработчикам приходится иметь дело с существующими типами аккумуляторов, энергоемкость которых не позволяет применить электромоторы, близкие по мощности к двигателям внутреннего сгорания. Отсюда не те разгонная и путевая скорости, да и дальность пробега получается весьма далекой от желаемой.
Энтузиасты электротранспорта никак не могут вырваться из своеобразного «ведьминого круга». Стремление вписать динамические характеристики машины в рамки ритма современной городской улицы заставляет применять мощный электромотор. Это, в свою очередь, приводит к увеличению массы источника тока, что неизбежно сказывается на необходимости упрочнять (а значит, еще более утяжелять!) саму конструкцию. Стало быть, требуется более мощный мотор…
Круг замыкается. И есть ли из него выход?
Самые радужные надежды на дальнейший прогресс в безрельсовом электротранспорте возлагаются прежде всего на источники питания.
В лабораториях многих стран ведутся разработки новых типов аккумуляторов, обладающих более высокой удельной энергоемкостью, то есть количеством электроэнергии, приходящейся на единицу веса источника тока (подробно об этом см. «М-К» № 4, 1968 г. и № 4, 1969 г.). Второй компонент оптимистичных надежд — тиристорная система управления, позволяющая достигать большей приемистости и экономного расхода электроэнергии.
Но это в перспективе. А пока разработчикам и особенно самодеятельным конструкторам приходится мириться с приравниванием расчетной скорости и разгонных характеристик к нижним пределам требований, существующих для моторного транспорта; ориентироваться на малую дальность пробега без подзарядки и ограниченную грузоподъемность.
Наиболее остро эти проблемы стоят перед разработчиками тех видов индивидуального электротранспорта, который тяготеет к уровню комфорта, достигнутому автомобилями. Такой транспорт с автономными источниками питания требует особенно экономного расходования электроэнергии: ведь от этого при прочих равных условиях зависит запас хода. Однако даже в хорошо сконструированном электромобиле часть энергии бесполезно затрачивается на перемещение тяжелой массы кузова, рамы, подвески, колес, сидений и т. п. Значит, самым экономным электрическим экипажем стал бы такой, у которого собственная масса была бы как можно меньшей.
Рассуждая дальше, можно прийти к выводу, что если отказаться от комфорта, то, используя запас электроэнергии одного-двух обычных аккумуляторов от легкового автомобиля, можно передвигаться практически с той же скоростью и на те же расстояния, что и на электромобиле классической компоновки. Что это за машина без комфорта? Да все тот же старый мотоцикл, только на электрической тяге — электроцикл. Их, кстати, начали выпускать некоторые зарубежные фирмы. Краткие характеристики таких машин приведены в таблице. Там же для сравнения приведены данные одного из лучших английских электромобилей «Энфилд-465», который демонстрировался на Всемирном симпозиуме по электротранспорту несколько лет назад.
Сравнение характеристик электромобиля, например, с электроциклом типа «Чагер» наглядно показывает высокую плату за комфорт. Чтобы возить двух человек, электромобиль должен одновременно перемещать 658 кг собственной массы, затрачивая на нее вчетверо больше энергии, чем на своих седоков. Между тем «Чагер», имеющий тот же запас хода и развивающий почти ту же скорость, весит почти столько же, сколько и перевозимый им человек, то есть вписывается в «мотоциклетные» характеристики.
Таблица 1. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ МОТОРНЫХ ЭКИПАЖЕЙ
| Модель | Скорость макс., км/ч | Запас хода, км | Аккумуляторы | Полная масса экипажа, кг | Полезная нагрузка, кг |
|---|---|---|---|---|---|
| «Соло электра» (ФРГ) | 25 | 20—35* | 2 батареи по 44 а. ч. | 67 | 75 |
| «Чагер» (Англо-Америк.) | 40 | 60 | 2 автомоб. аккумулят. батареи | 95.2 | 80 |
| «Элстар» (Чехословакия) | 30 | 30 | 4 специальн. аккумулят. батареи | 78 | 1 чел. |
| Электровелосипед (США) | 29 | 24 | 1 батарея 50 а. ч. | — | 75 |
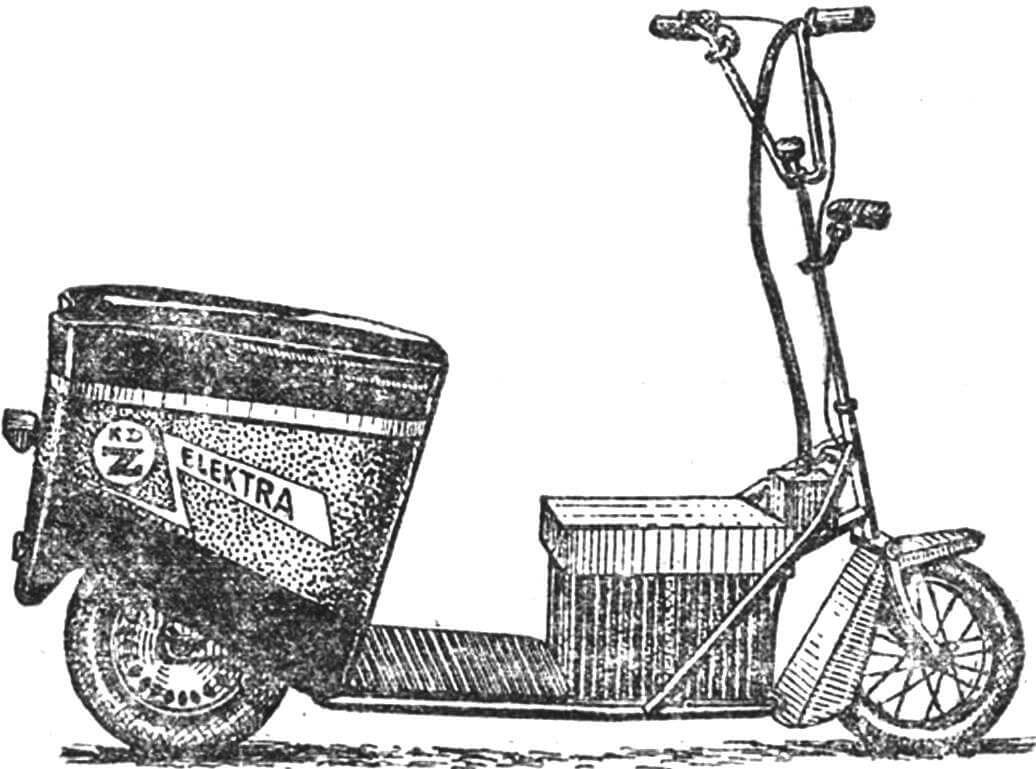
| Электросамокат «Электра» (Чехословакия) | 25 | 20-28* | 1 батарея 50 а. ч. | 46 | 1 чел. |
| Электромобиль «Энфилд 62» ** (Англия) | 60 | 48-64* | Специальн. батарея (масса — 200 кг). | 658 | 100 |
Несмотря на скромные технические возможности и довольно высокие цены, электроциклы уже сейчас пользуются спросом. И это вполне понятно. Ведь, например, прогулка по лесу на бездымном и бесшумном электрическом экипаже, несомненно, приятнее, чем на бензиновом, особенно если к этому прибавить и более простое управление и обслуживание.
Но электроцикл — не просто рама мотоцикла плюс электропривод. Это новый вид транспорта со своими особенностями конструкции. Так, например, в модели «Соло электро» было применено автоматическое центробежное сцепление, обеспечивающее пробуксовку в трансмиссии при перегрузках электродвигателя. Кроме того, при наступлении перегрузки двигателю можно помочь педалями, как на мопеде. На машине имеется прибор, сигнализирующий о критической точке расхода электроэнергии в аккумуляторах и о необходимости двигаться к месту дозарядки по-велосипедному.
На некоторых электроциклах конструкторы ставят встроенные зарядные устройства. При этом масса экипажа увеличивается всего на 3—4 кг, зато появляется возможность заряжать аккумуляторы в любом месте, где есть электрическая сеть. Например, в «Чагере» зарядное устройство выполнено в форме «бака» и установлено на верхней трубе рамы.
Используемые в электроциклах двигатели постоянного тока с последовательным возбуждением имеют мощность в пределах 500 ÷ 730 Вт и рассчитаны на напряжение 24 В и 48 В.
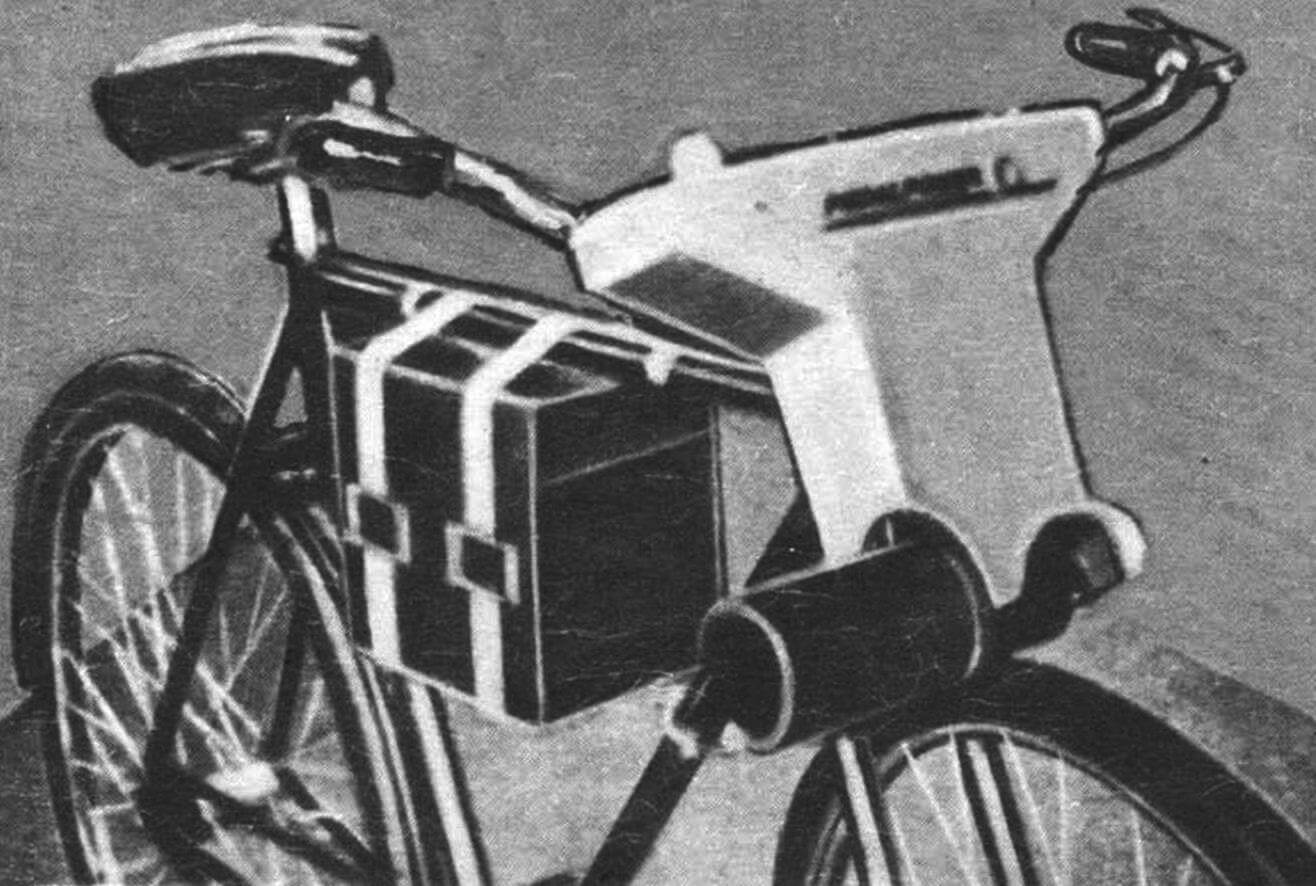
Установка на электропривод не обошла вниманием и обычный велосипед. Аккумулятор от легкового автомобиля, размещенный в сумке с плотной крышкой, закрепляется обычно на раме велосипеда или на багажнике, над задним колесом машины. Электродвигатель с фрикционным резиновым роликом на валу коротким шарниром соединен с передней вилкой. В рабочем положении под действием пружины ролик прижимается к переднему колесу велосипеда, передавая ему вращение от электродвигателя. В нерабочее положение мотор переводится с помощью рычага на руле, подобного ручке тормоза. При нажатии на рычаг усилие передается через гибкий тросик на шарнир подвески электродвигателя: последний приподнимается, и его ролик перестает касаться колеса. Одновременно выключается электрическая цепь двигателя. Рычаг может быть зафиксирован в нажатом состоянии, и тогда электропед вновь становится велосипедом: можно передвигаться с помощью педалей.
Таблица 2. ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ С ПОСЛЕДОВАТЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
| Характеристики | МУ-511 | МУ-431 | Д-400 |
|---|---|---|---|
| Мощность, Вт | 500 | 400 | 400 |
| Напряжение, В | 22 | 24 | 24 |
| Номинальный ток, А | 42 | 25 | 22 |
| Скорость вращения, об/мин | 5000 | — | 6500 |
| Направление вращения | реверсивное | — | левое |
| Масса, кг | 2,5 | 2,5 | 3 |
| КПД | 0,54 | — | 0,63 |
В таблице приведены данные для велосипеда с мотором мощностью около 400 Вт. Малая масса электропеда и возможность помогать двигателю на подъемах педалями позволяют использовать электромоторы мощностью всего 150 — 200 Вт. Педали способствуют и увеличению запаса хода с одной зарядки. Правда, неизбежны потери в максимальной скорости.
Пожалуй, вариант электрифицирования велосипеда наиболее доступен при любительском конструировании. Здесь все работы сводятся к изготовлению деталей электропривода. Однако при всей заманчивой простоте и привлекательности электропедов у них есть один серьезный недостаток. Аккумулятор на них располагается довольно высоко, и если не принять специальных мер защиты, то при падении возможно разрушение источника тока из-за удара о дорогу. При этом кислота может попасть на одежду и на тело упавшего. Амортизация же и герметизация аккумулятора приведут к утяжелению конструкции: понадобится жесткий контейнер. Видимо наиболее рациональным решением, обеспечивающим сохранность аккумулятора без специального контейнера, будет расположение его как можно ниже. Необходимо также заранее позаботиться о том, чтобы электролит не вытекал из вентиляционных отверстий корпуса.
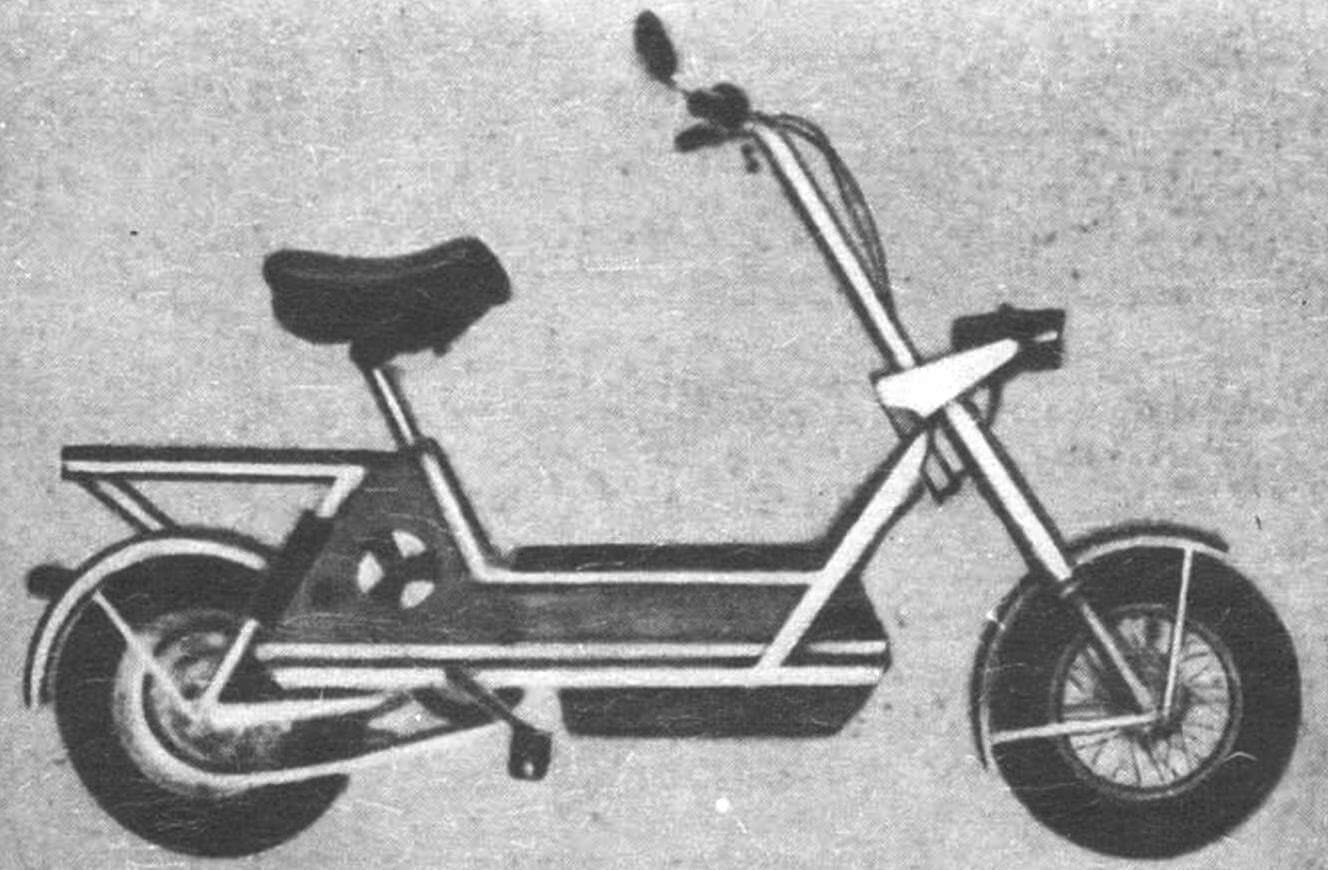
Именно по этому пути пошли чехословацкие конструкторы-любители, создавая оригинальный электрический самокат «Электра». Эта машина имеет низко расположенный центр тяжести и весьма малую массу ходовой части. В электросамокате использованы колеса, вилка и рулевая колонка от детского самоката. «Электра» со взрослым водителем может преодолевать подъемы до 8%, а «самокатная» компоновка дает возможность помогать двигателю на подъемах и при трогании отталкиванием ногой, как это делают на безмоторном самокате. Низкая площадка для ног создает удобства водителю при посадке, трогании и остановке.
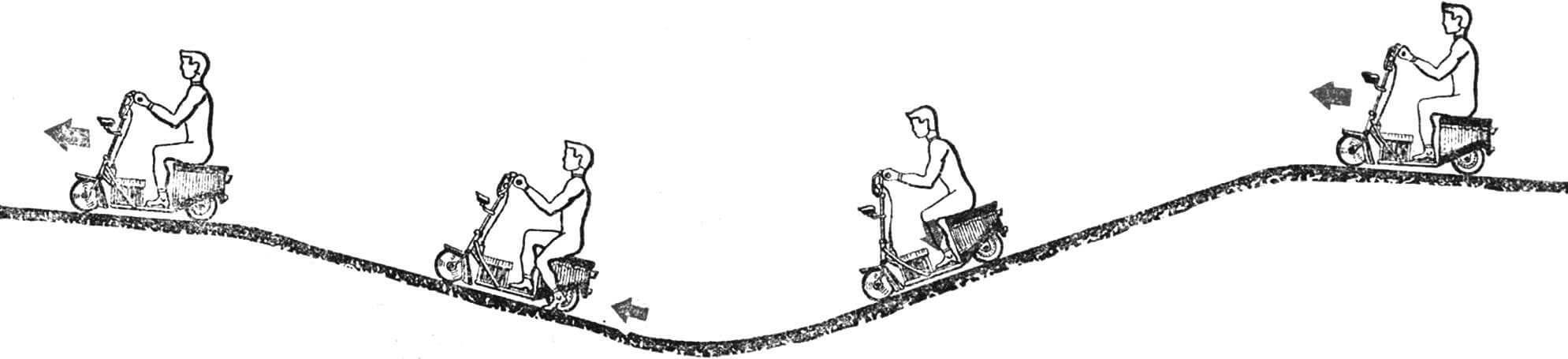
ровный участок — спуск — подъем — ровный участок.
Рама самоката сварена из тонкостенных стальных трубок. Электромотор, силовая передача, зарядное устройство и переключатель «езда — заряд» расположены под сиденьем и закрыты съемным кожухом. Там же есть место для инструмента и мелких вещей. Усилие от электромотора через ременную передачу передается на один конец промежуточного вала. Другой его конец со звездочкой соединен велосипедной роликовой цепью с задним колесом самоката.
Мотор и аккумулятор защищены от перегрузки и короткого замыкания автоматическим предохранителем, который используется и как стояночный отключатель аккумулятора. Предохранитель установлен у передней стенки аккумулятора на вертикальной стойке рамы. Включение электромотора производится поворотом ручки на руле наподобие ручки «газа» на мотоцикле. Вращение ручки передается гибким валом на рабочий выключатель, установленный около аккумулятора. В качестве гибкого вала использован вал привода спидометра от автомобиля. На электросамокате применен один тормоз «челюстного» типа от гоночного велосипеда, действующий на обод переднего колеса. Однако конструкция электросамоката вполне позволяет использовать тормоза на обоих колесах.
Конечно же, электросамокат не предназначен для движения в потоке большого транспорта. Однако, на наш взгляд, «Электра» может стать удобным транспортным средством для автогородка, для прогулок вне автодорог. Авторы же электросамоката предвидят и более широкое его применение: например, как внутренний транспорт для персонала аэродромов, крупных предприятий, расположенных на больших площадях. Практика показала, что при постройке самодельных двухколесных электрических экипажей, подобных описанным выше, необходимо использовать электродвигатели постоянного тока с последовательным возбуждением. Тогда расход энергии, отбираемой от аккумулятора при любых режимах, в том числе и при наборе скорости, будет одинаковым. От величины нагрузки будет зависеть лишь скорость вращения вала двигателя.
Это условие является решающим для обеспечения разно-мерной нагрузки аккумулятора, что при прочих равных условиях способствует большей дальности пробега без подзарядки. Важно также, чтобы рабочее напряжение электродвигателей соответствовало исходному напряжению источников питания. Однако при установке на электроцикл одного двенадцативольтового аккумулятора иногда приходится использовать электродвигатели с более высоким рабочим напряжением: выбор мощных двенадцативольтовых двигателей ограничен. При этом, конечно, оказываются сниженными и мощность на валу, и число оборотов, и КПД двигателя.
Для справки приводим характеристики некоторых электродвигателей пригодного для электроциклов диапазона мощностей.
М. ТОДОРОВ, инженер, Ленинград
Рекомендуем почитать
 ИХ ПЕРВЫЕ РАКЕТЫ
ИХ ПЕРВЫЕ РАКЕТЫ
С чего начать! Именно такой вопрос задают себе многие начинающие ракетомоделисты. Какую схему модели выбрать и по какой технологии ее строить! На наш взгляд, хорошую помощь в этом окажет... ЛОВУШКА ДЛЯ КРОШКИ
ЛОВУШКА ДЛЯ КРОШКИ
При сверлении отверстий на Потолке трудно уберечь инструмент и себя от сыплющихся сверху мелких осколков и пыли. Выручит своеобразная конусная спираль, навитая из пружинистой проволоки....