
Привет! Меня зовут Эдуард, и я сейчас учусь в колледже на инженера-механика. Хочу рассказать вам о своем последнем проекте — радиоуправляемом вагончике, который я сделал, чтобы облегчить транспортировку различных вещей. Это устройство можно легко контролировать с помощью RC-контроллера, похожего на тот, что используется в RC-автомобилях. Рама сделана из стальной профильной трубы, а панели — из дерева. Этот проект стал для меня настоящим спасением, когда нужно что-то переносить, особенно во время пикников или кемпинга. Теперь можно просто загрузить все в вагончик и спокойно перемещать вещи от машины к месту отдыха, не таская их вручную.
Материалы и инструменты

Начну с того, что этот гайд больше о том, как вдохновиться и создать нечто подобное, чем пошаговое руководство. Многие из компонентов у меня уже были, или я их нашел на свалке. Вот список основных материалов, которые я использовал:
Рама:
- Профильная стальная труба 3/4″ и 5/8″
- Плоский стальной прокат различных размеров
- Фанера 3/8″
Механические компоненты:
- Стальной круглый пруток 0.75″
- Наконечники рулевых тяг
- Колеса 5/8″ от Harbor Freight
- Дверные петли
- Замок сундука
- Шестигранный болт 5/8″
- Подшипники
Электрические компоненты:
- Драйвер мотора Cytron
- Электромотор с осью (снятый с инвалидного кресла)
- Линейный актуатор
- Аккумулятор
- RC передатчик
Инструменты:
- Сверлильный станок
- Сварочный аппарат
- Торцевые головки
- Ленточная пила
- Токарный станок
- Шлифовальная машина
- Паяльник
Шаг 1: Сборка рамы
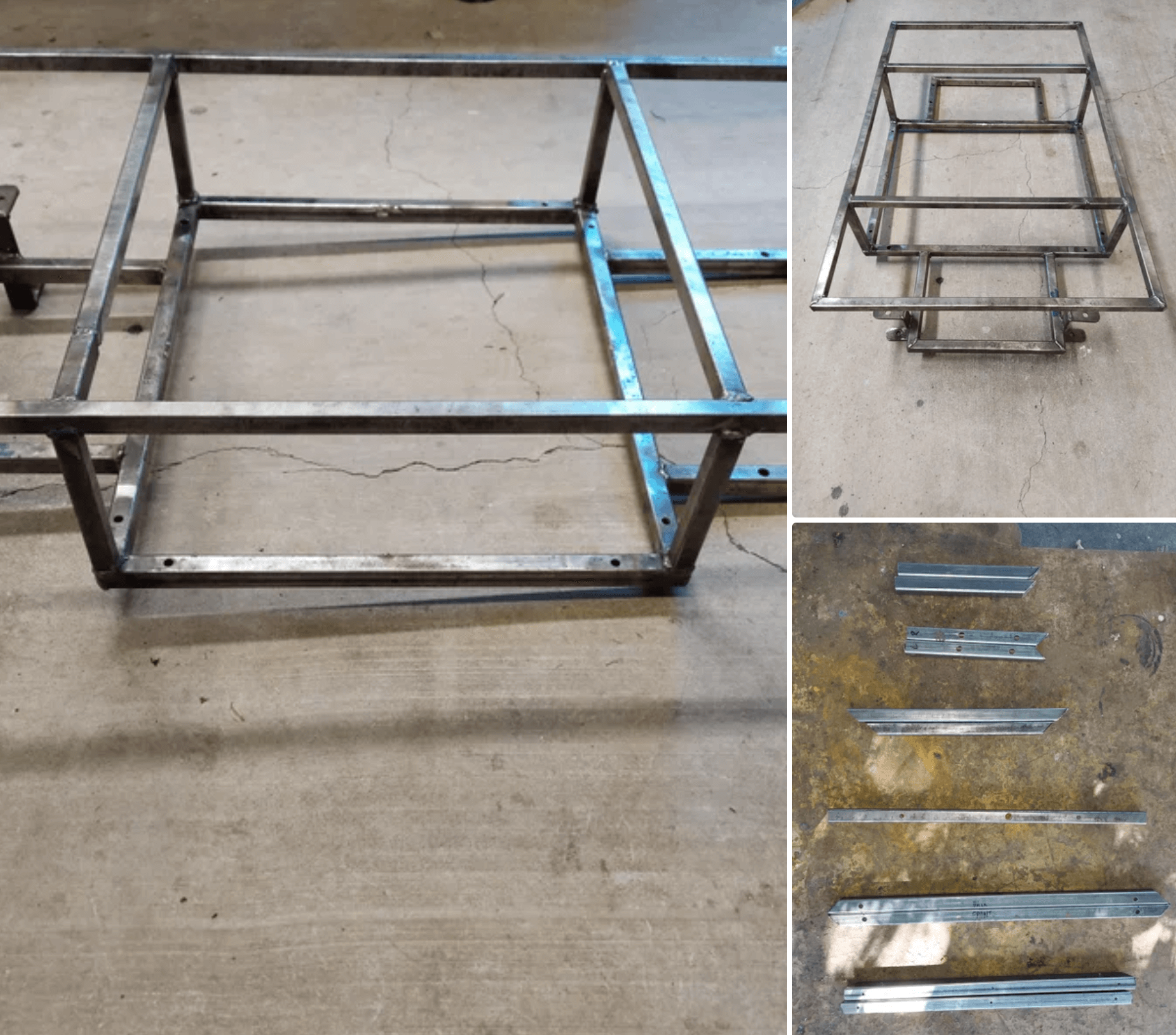
Первое, с чего стоит начать, — это сборка рамы вагончика. Я использовал комбинацию стальной трубы 3/4″ и 5/8″. Рама разрабатывалась на основе заднего моста, поэтому рекомендую сначала продумать конструкцию, отталкиваясь от него. Я спроектировал свою раму в Fusion 360. Для этого этапа вам понадобится какой-то вид пилы, чтобы обрезать все детали до нужной длины, а затем сварить их вместе.
Шаг 2: Монтаж заднего моста
Следующий шаг — это создание крепления для заднего моста. Все будет зависеть от того, какой трансмиссией вы располагаете. В моем случае, трансмиссия была снята с инвалидного кресла и не имела монтажных отверстий. Я использовал несколько кусочков плоского стального проката, чтобы создать крепление, которое охватывало бы квадратную часть моста. Идеально было бы использовать фрезерный станок, но я просто сварил несколько пластин, чтобы получить нужную форму. Добавьте два монтажных отверстия с каждой стороны крепления, чтобы можно было установить его на раму. Я также использовал токарный станок, чтобы сделать проставки, которые фиксируют крепление, так как оно не закреплено болтами или сваркой на самой трансмиссии.
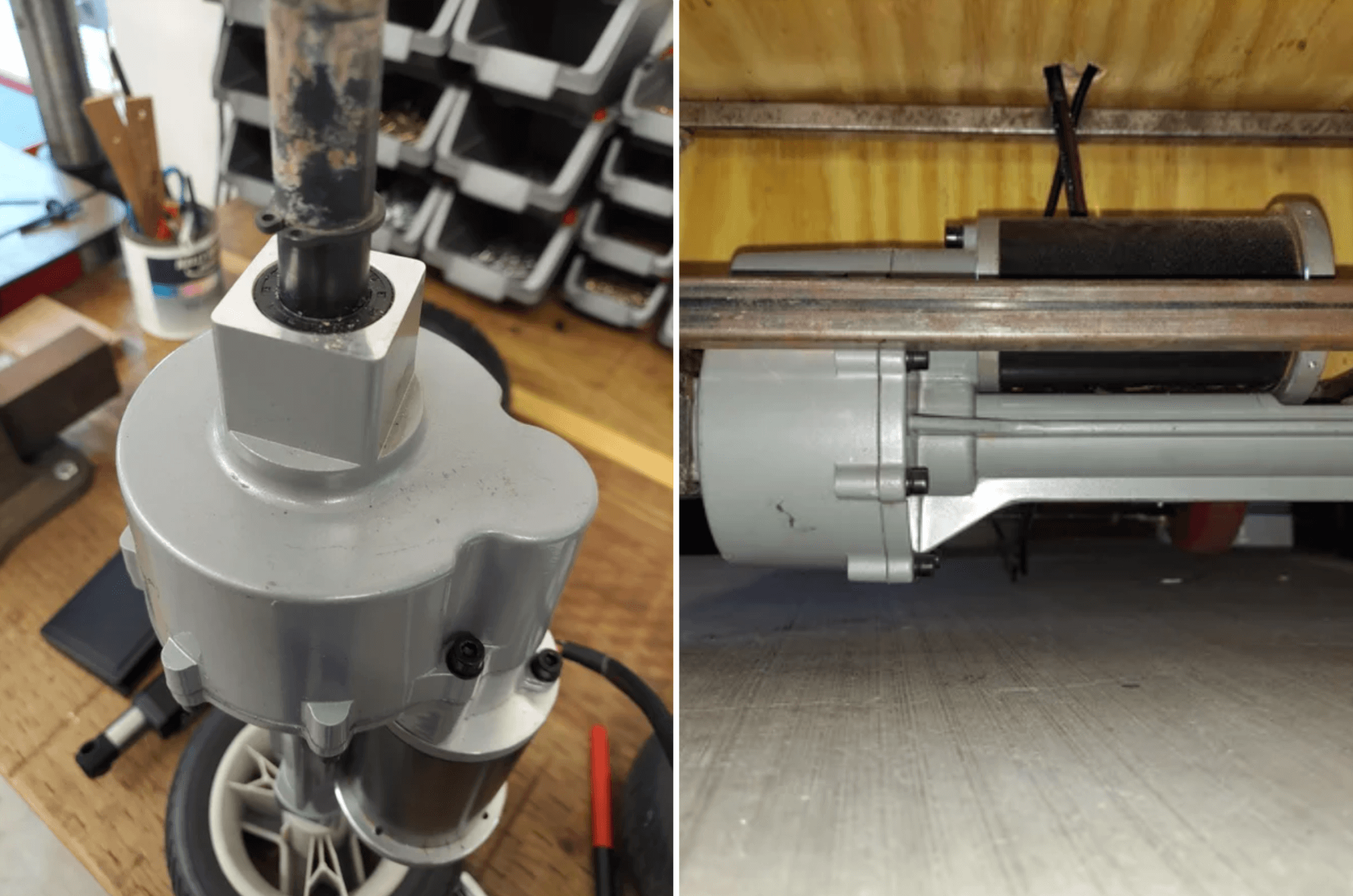
Шаг 3: Изготовление рулевых соединений

Далее — изготовление рулевых соединений. Для этого шага потребуется токарный станок, но его можно пропустить, если вы не хотите устанавливать подшипники в шпиндель. Я использовал стальной круглый пруток 3/4″ и сделал в нем отверстие 5/16″, чтобы можно было вставить болт и установить его на раму. Затем я немного увеличил отверстие, чтобы установить подшипник для плавного вращения. Далее нужно приварить шестигранный болт 5/8″ перпендикулярно круглому прутку. Это место для крепления колеса. Затем нужно приварить плоские стальные пластины с отверстием, через которое будет проходить рулевая тяга, чтобы поворачивать оба колеса одновременно. Один из шпинделей потребует еще одной пластины с отверстием, так как к нему будет крепиться линейный актуатор.
Шаг 4: Установка крепления шпинделя

Следующий шаг — создание крепления шпинделя. Здесь важно использовать достаточно толстый плоский стальной прокат (примерно 0,2″), так как передние колеса будут опираться на него. Нужно вырезать три детали из плоского проката, как показано на чертеже. Два коротких элемента должны иметь отверстие для крепления шпинделя. Затем приварите их так, чтобы все части были перпендикулярны друг другу, и установите крепление на раму. Место сварки будет зависеть от заднего моста и передних колес, чтобы они не были установлены слишком высоко или низко.
Шаг 5: Регулировка линейного актуатора
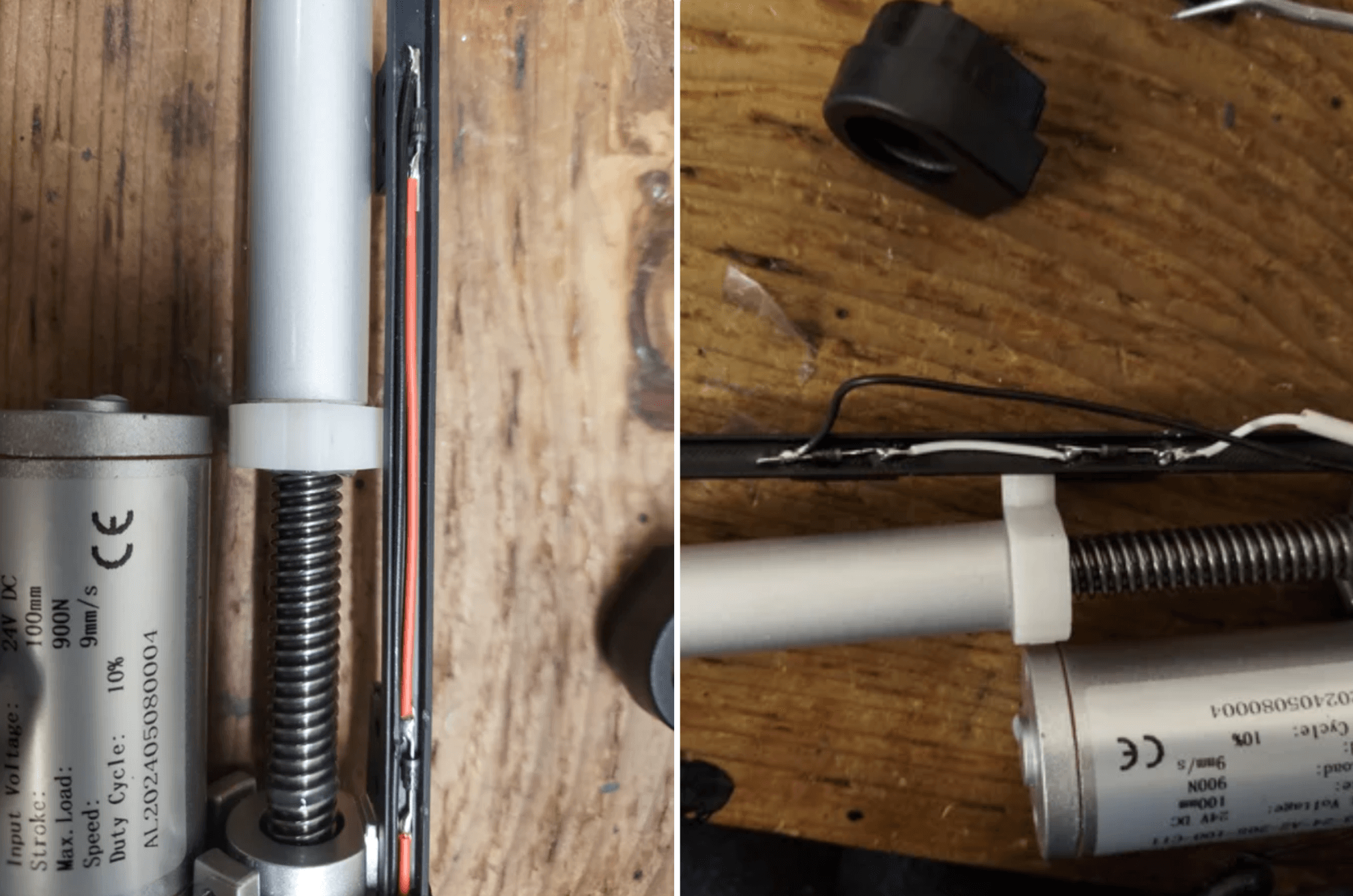
Этот шаг включает в себя регулировку конечных положений линейного актуатора. Это зависит от модели актуатора, но в моем случае мне пришлось разобрать его и физически переместить конечные положения в нужное место. Я распечатал новую базу для ограничителей на 3D-принтере и выбрал место их установки. Этот шаг можно выполнить позже, когда рулевая система будет собрана, чтобы точно определить минимальную и максимальную длину хода актуатора, чтобы не повредить компоненты.
Шаг 6: Установка рулевого механизма
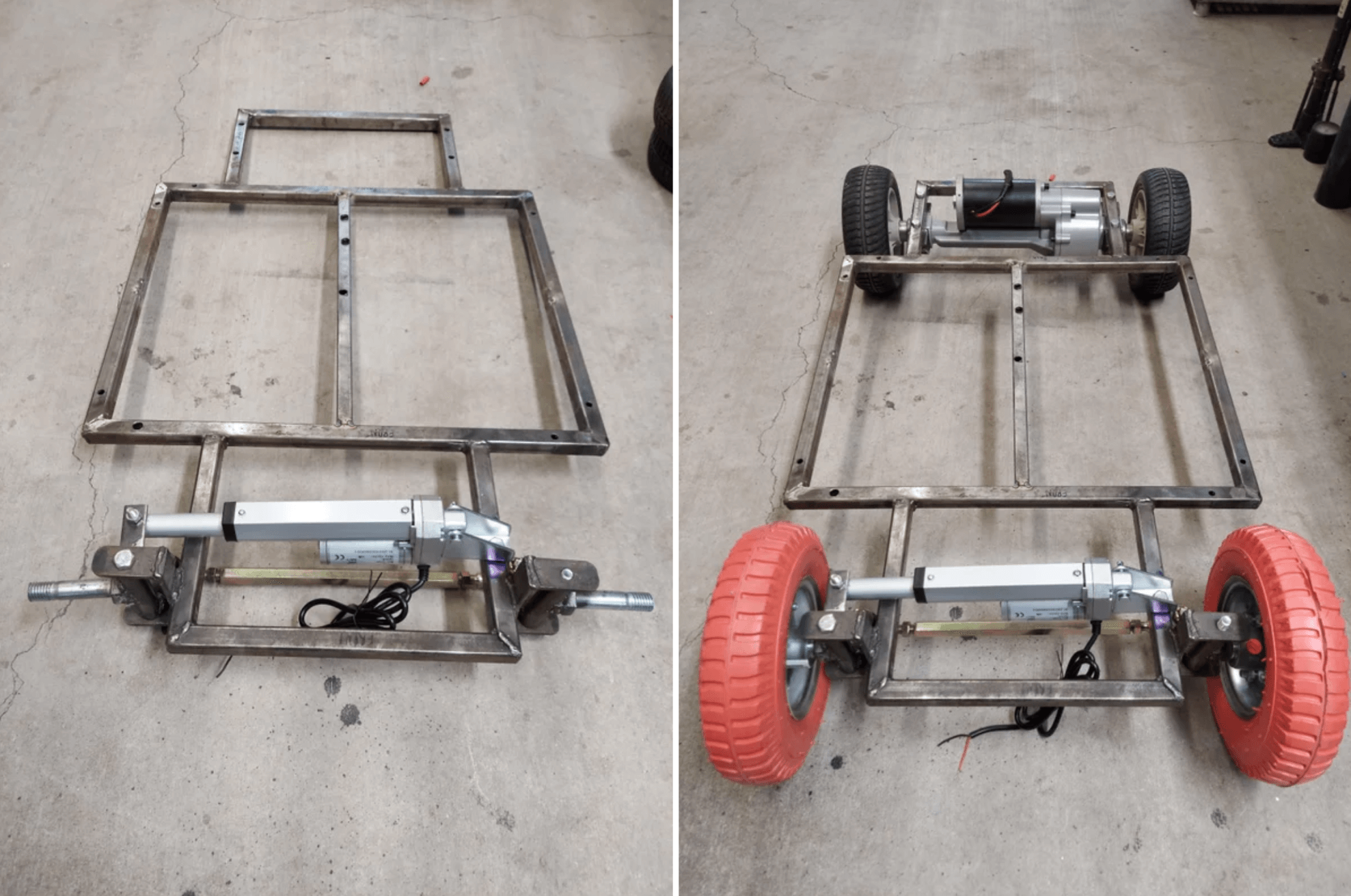
После этого нужно установить рулевой механизм. Установите по одному шпинделю с каждой стороны и соедините их рулевой тягой. Далее установите линейный актуатор, просверлив отверстие в раме. Линейный актуатор должен быть максимально параллелен рулевой тяге. Во время поворота актуатор будет немного вращаться, поэтому нужно просверлить отверстия для крепления на обоих концах. Также можно установить передние колеса и закрепить их с помощью стопорных гаек.
Шаг 7: Установка деревянных панелей

На следующем этапе я установил деревянные панели. Изначально планировал использовать металлические листы, но дерево оказалось дешевле. Вырежьте деревянные панели по размерам открытых участков рамы, чтобы предотвратить выпадение вещей. Просверлите отверстия, чтобы закрепить горизонтальные деревянные панели, и прикрепите вертикальные с помощью металлических скоб. Рядом с задней частью вагончика я рекомендую сделать небольшой сундук для хранения всех электронных компонентов. Используйте петли, чтобы создать дверь, которую можно будет открывать и закрывать для доступа к электронике.
Шаг 8: Сборка электроники
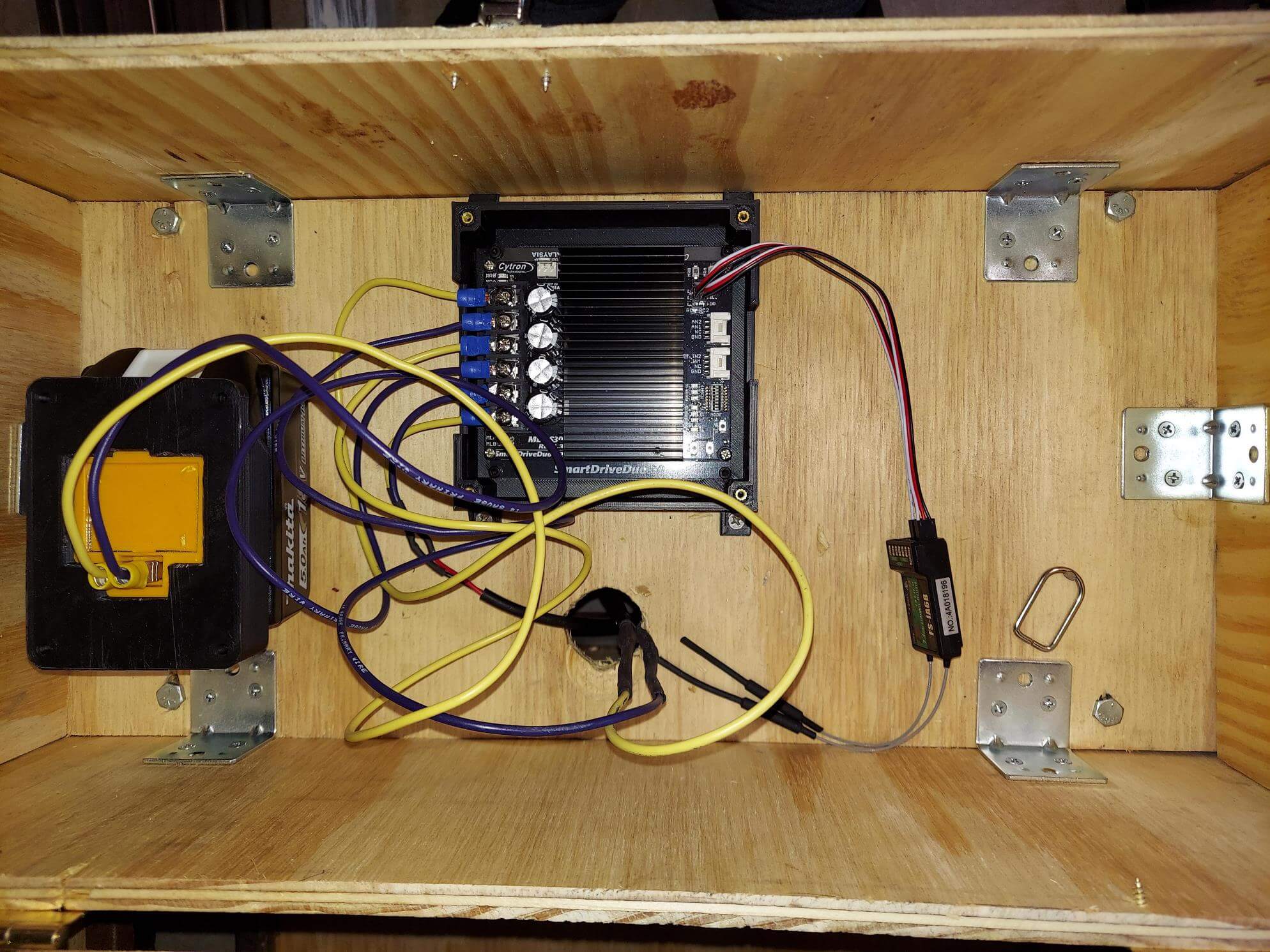
Заключительный шаг — это сборка электроники. Я использовал драйвер мотора Cytron для управления двумя моторами. Проведите провода от обоих моторов внутрь сундука и подключите их к драйверу мотора. В качестве источника питания я использовал аккумулятор 18В Makita. Далее подключите RC-приемник к драйверу мотора. После этого у вас будет рабочий вагончик. Возможно, потребуется некоторая настройка RC-передатчика, но это должно быть довольно просто.
Часто задаваемые вопросы
Какую нагрузку может выдержать радиоуправляемый вагончик?
- Это зависит от используемых материалов и конструкции. В среднем, такой вагончик может перевозить до 50-100 кг, но лучше не перегружать его.
Можно ли использовать другие материалы для создания вагончика?
- Да, конечно. Основное — это каркас и прочная ось. Если найдете альтернативные материалы, которые будут дешевле или легче, почему бы и нет?
Насколько сложно собрать такой вагончик?
- Если у вас есть базовые навыки работы с инструментами и сваркой, задача вполне выполнима. Главное — это желание и аккуратность.
Можно ли установить на вагончик камеру для FPV-управления?
- Конечно! Установка камеры добавит еще больше удовольствия в управление вагончиком на дистанции.
Где лучше всего использовать такой вагончик?
- Он отлично подойдет для пикников, кемпинга, садовых работ и даже для небольших строительных проектов. Везде, где требуется перевозка тяжелых предметов, он будет кстати.
Эдуард
Рекомендуем почитать
 ОСИ ИЗ ГВОЗДЯ
ОСИ ИЗ ГВОЗДЯ
Самое слабое место в конструкции валиков для накатки фотографий — оси, в качестве которых используются обычные шурупы. После небольшого времени использования они начинают вываливаться из... ВМЕСТО ПЕЧАТНОГО МОНТАЖА?
ВМЕСТО ПЕЧАТНОГО МОНТАЖА?
Разработка и изготовление печатной платы для одного-единственного экземпляра самодельного устройства с повышенной плотностью монтажа превращаются порой в проблему даже для опытного...