
 Почти девять лет веду судомодельный кружок, последние три года — в городском Центре детского творчества. Но радиоуправляемыми моделями до недавнего времени заниматься не приходилось из-за трудностей в приобретении должной аппаратуры. Но вот удалось раздобыть старенький «Супронар-838», и сразу же возникли проблемы со штатным регулятором оборотов и реверсом ходового двигателя.
Почти девять лет веду судомодельный кружок, последние три года — в городском Центре детского творчества. Но радиоуправляемыми моделями до недавнего времени заниматься не приходилось из-за трудностей в приобретении должной аппаратуры. Но вот удалось раздобыть старенький «Супронар-838», и сразу же возникли проблемы со штатным регулятором оборотов и реверсом ходового двигателя.
По опыту областных соревнований знаю, что большинство спортсменов, столкнувшись с аналогичными трудностями, прибегают к дополнительной рулевой машинке (РМ), с помощью которой коммутируют требуемые контакты. Только приемлемо это лишь на крупных моделях, а на мелких (Ф-2Ю, Ф-4А/Б), где борьба идет за каждый сэкономленный грамм, разместить еще одну РМ от старой и громоздкой отечественной аппаратуры — дело весьма проблематичное.
И тут как нельзя кстати появилась статья В.Жорника «Электронные регуляторы оборотов электродвигателей» («Моделист-конструктор» № 8 за 1998 год). Особенно привлекательным выглядело техническое решение с использованием импортной микросхемы ТА7291.
Но на поверку такой регулятор оказался довольно капризным. Вместо плавной работы электродвигателя, потребляющего от 8-вольтной аккумуляторной батареи ток 0,4 А, начались сплошные рывки, а микросхема ТА7291Р (установленная на теплоотводе-радиаторе) довольно сильно нагревалась. Правда, при снижении напряжения питания до 6,5 В (для этого пришлось из батареи удалить один Д-0,5) претензий к мотору поубавилось. Зато скорость упала настолько, что четырех минут, отведенных правилами на прохождение моделью требуемой дистанции, стало не хватать. Не оправдались также надежды на ТА7291Б — даже с двумя микросхемами этого типа, включенными параллельно, электродвигатель не смог работать надежно.
Появилось предположение, что виной всему слишком слабый сигнал, поступающий с интеграторов на управляющие выводы микросхемы, а потому, мол, необходимо ввести буферные ключи для поднятия его до ТТЛ-уровня управления. Но проверить справедливость этого предположения на практике не получилось.
Гораздо плодотворнее оказался иной путь: с заменой дорогостоящей импортной ТА7291 дешевыми и доступными транзисторными ключами. В результате удалось, использовав фрагменты уже не раз публиковавшихся технических решений, объединить все в надежно работающую конструкцию. В частности, в нее почти без изменений вошли предлагавшиеся В. Жорником ждущий мультивибратор, схема сравнения и интеграторы.
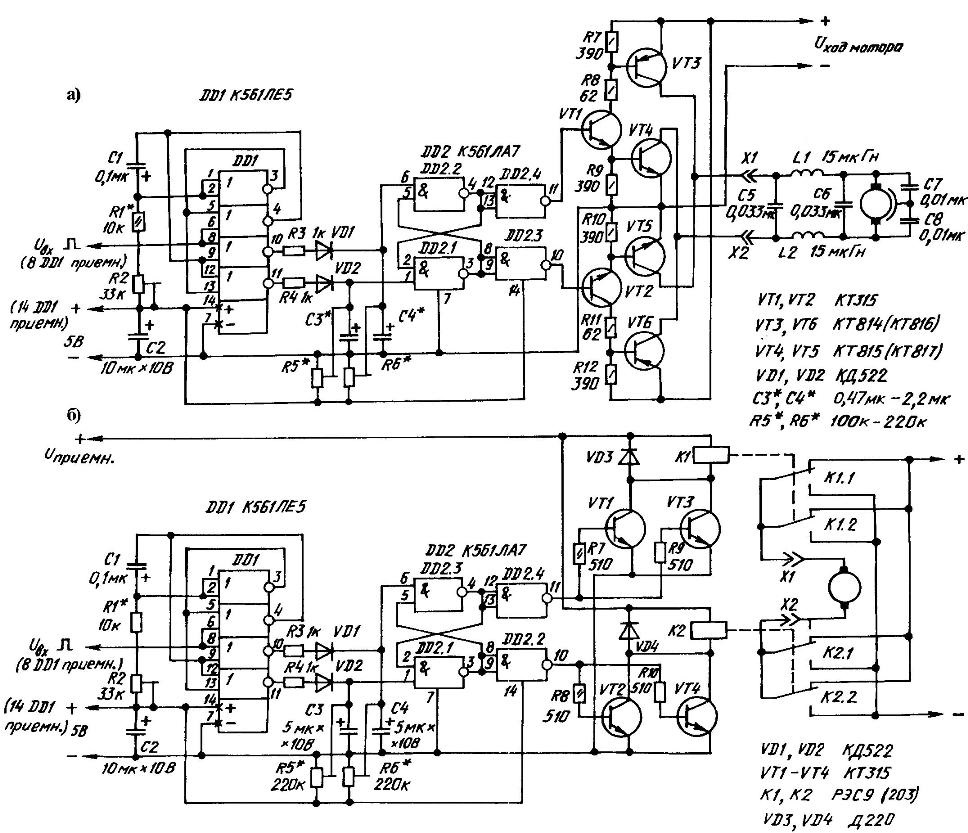
Принципиальные электрические схемы надежного регулятора хода (а) и его модификации для крупных судомоделей (б)
От интеграторов управляющие сигналы поступают теперь на К561ЛА7, включенную по триггерной схеме. Это позволяет не только защищать устройство от одновременного прохождения управляющего сигнала к обоим плечам транзисторных ключей (а значит, избегать короткого замыкания в цепи питания ходового электромотора), но и повышать управляющий сигнал до ТТЛ-уровня.
При подключении регулятора к приемнику следует учесть, что штатное напряжение питания последнего может оказаться больше Uпит дешифратора командных сигналов, выполненного в «Супронаре» на двух микросхемах К155ТМ2. И не исключено, что при подсоединении регулятора напрямую к источнику электроэнергии приемника уровень сигнала, созданный ждущим мультивибратором, превысит командный сигнал. А это может привести к сбоям в работе схемы сравнения.
Избежать появления такого рода последствий позволит ввод 5-вольтного стабилитрона (через токоограничивающий резистор) в цепь питания микросхем регулятора. Но есть и более оригинальное, проверенное практикой решение. Суть его в подключении «плюсовой» шины питания непосредственно к выводу 14 микросхемы К155ТМ2 приемника «Супронара».
Отладку регулятора выполняют в следующем порядке. Временно заменяют резистор 131 «подстроечником» на 33 — 68 кОм, а ползунок переменного резистора 132 устанавливают в среднее положение. Включают передатчик и приемник (ручки управления находятся в нейтральном положении), добиваются регулировкой 131 одновременного исчезновения сигнала на 10-м и 11-м выводах микросхемы DD1.
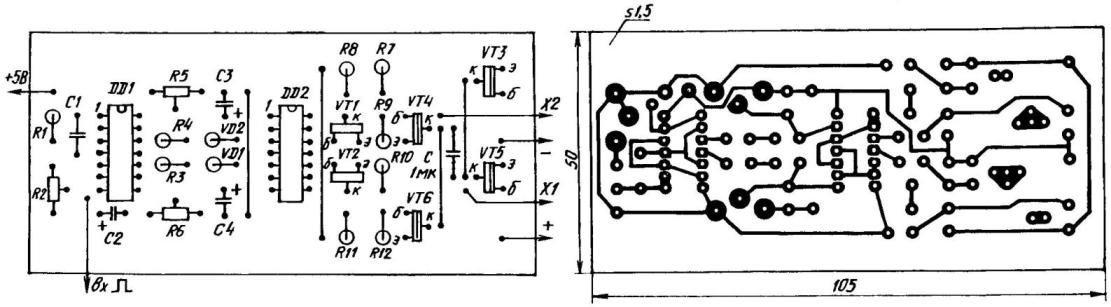
Печатная плата устройства с расположением радиодеталей (резисторы и полупроводниковые диоды смонтированы вертикально; во избежание нагрева транзисторы желательно установить на радиаторы — алюминиевые пластины от детского «Конструктора»)
Затем временный «подстроечник» (31 выпаивают, измеряют его сопротивление и заменяют постоянным резистором уточненного номинала. Повторяют юстировку подстроенным резистором 132.
Далее с помощью подстроенных резисторов 135 и 136 выставляют режим работы интеграторов. Да так, чтобы при нейтральном положении ручки «газа» передатчика на выводах 10 и 11 микросхемы DD2 были логические нули. Зато при полном отклонении ручки «газа» (в любом из направлений) на одном из указанных выводов появлялась бы логическая единица. Подобрав номиналы подстроенных резисторов 135 и 136, а также конденсаторов СЗ и С4 добиваются плавного изменения скважности сигнала (от полного логического «0» до полной логической «1» на всем участке отклонения ручки «газа» передатчика) или дискретного срабатывания. В дальнейшем подстроенные 135 и 136 легко заменить на постоянные резисторы уточненных номиналов. Но можно оставить эти «подстроечники», зафиксировав их ползунки от возможного сдвига, вызываемого вибрацией корпуса модели, каплей нитрокраски или клея.
Данная схема регулятора хода была установлена на пластиковую модель немецкого линкора «Тирпиц» фирмы «Академия» (Южная Корея) в масштабе 1:350 (длина корпуса 717 мм) и на зимних городских судомодельных соревнованиях школьников «Золотое кольцо» заняла второе место в классе моделей F-4В, уступив всего несколько очков лидеру (модели немецкого торпедного катера S-boot в масштабе 1:72, оснащенной импортной аппаратурой радиоуправления).
Судомоделистам интересна будет, видимо, и модифицированная схема регулятора, успешно прошедшая самые строгие испытания. Она предназначена для установки на более крупных моделях и отличается от рассмотренной тем, что вместо транзисторных ключей в ней применена релейная коммутация с полной развязкой ходового электромотора по цепи питания приемника.
В. САВЕЛЬЕВ, г. Радужный, Владимирская обл.
Рекомендуем почитать
 КАМЕНЬ НА КАМЕНЬ, КИРПИЧ НА КИРПИЧ
КАМЕНЬ НА КАМЕНЬ, КИРПИЧ НА КИРПИЧ
1. Для изготовления одного сиденья потребуются следующие материалы: бетонная плита размерами 600x600 мм, 20 кг сухой цементно-песчаной смеси для раствора, 26 кирпичей. Понадобятся и... И САНКИ, И РУЧНАЯ ТЕЛЕЖКА
И САНКИ, И РУЧНАЯ ТЕЛЕЖКА
Заимев стандартные шесть соток, вот уже несколько лет кряду пользуюсь уникальным, по определению соседей, транспортным средством, одновременно являющимся и модернизированными санками, и...