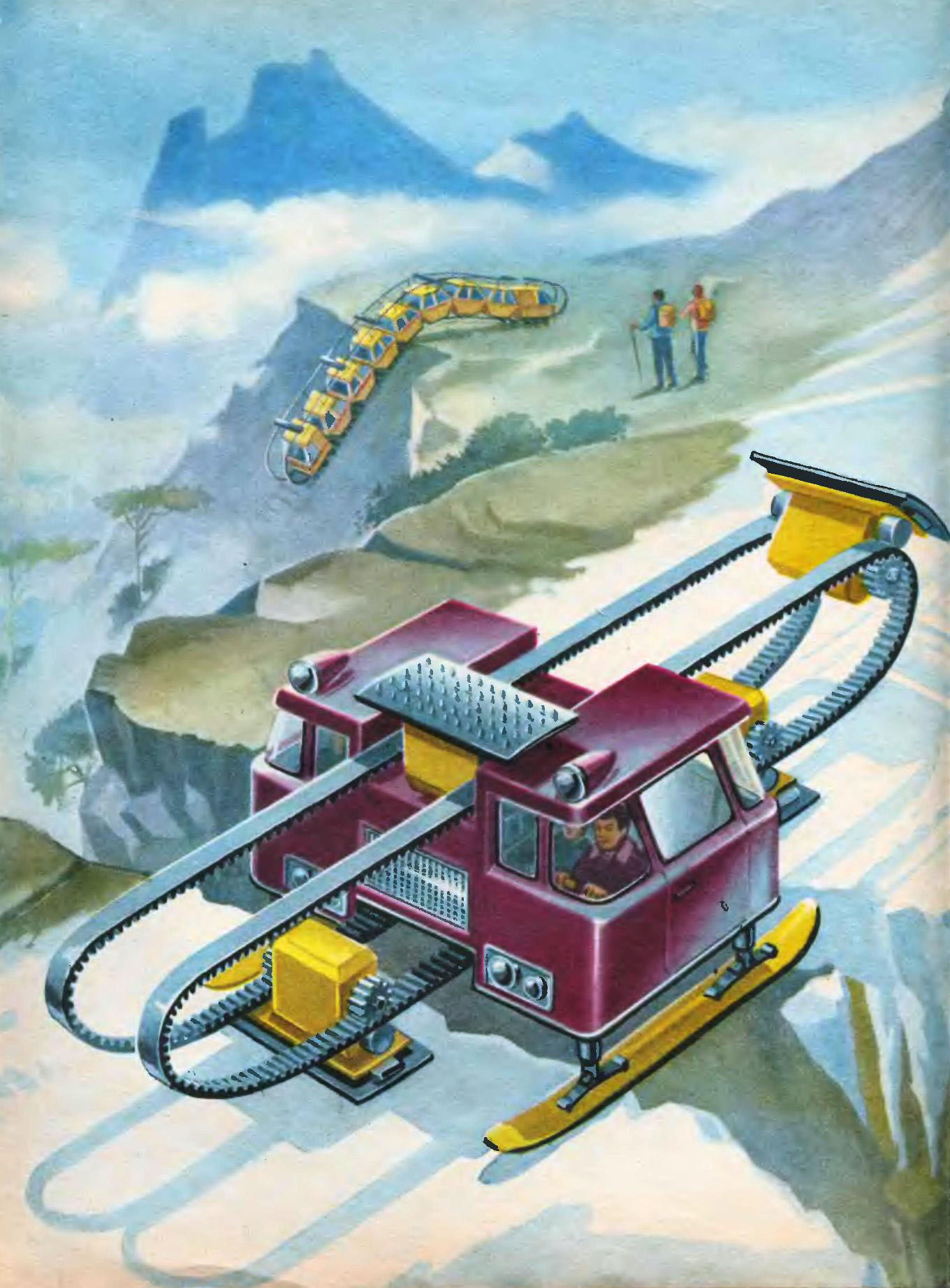
Каждый раз, таская громоздкую геофизическую аппаратуру по горным ледникам, я мечтал о вездеходе. Наконец он был получен. И вот мы на гусеничной машине-амфибии против заснеженных гор… Взревел мотор, и машина, погрузившись в снег по кабину, медленно двинулась с места. Впереди был лоб ледника. Довольно пологий по пешим меркам: градусов пятнадцать. Но водитель знал, что по снегу его не взять, и повел машину наискось. На середине лба соскочила гусеница.
Кувалда, груда металла, утонувшая в снегу, мороз и ветер… Около часа мы натягивали гусеницу, а потом повернули назад. Можно было спрямить по обдуваемой ветром морене ледника с торчащими из-под снега камнями. Но вездеход пошел в обход: камни. На них так легко ломаются траки и пальцы гусениц.
И я понял, что самый распространенный, самый всесильный из существующих вездеходов — гусеничный, — совсем не мечта, а пройденный этап.
Нужно что-то принципиально новое: транспорт, который шел бы по буграм льда высотой в метр и рыхлому снегу, по воде, по камням и крутым уклонам. Это устройство должно быть достаточно длинным, чтобы преодолевать трещины, зияющие во льду, или закрытые снежными «мостами»; достаточно легким и разборным, чтобы его можно было отправить в багажном вагоне и забросить в горы маленьким вертолетом…
…На камнях гусеница рвется.
Значит, нужно порвать ее заранее! На отдельные кусочки, траки, — пусть ползают самостоятельно. Как? Поставить на каждый, скажем, электромоторы. С их помощью траки будут двигаться по замкнутой направляющей и, как лебедки, будут тащить машину.
Так родилась идея авторского свидетельства № 386797, выданного 28 марта 1973 года на «Движитель транспортного средства», который можно назвать траковым, потому что его суть и основа — самоходный трак. Формулировка предмета изобретения несколько сложна: «Движитель транспортною средства, содержащий замкнутые направляющие, связанные с корпусом транспортного средства, подвижно установленные на направляющих опорные элементы, отличающиеся тем, что с целью автоматического приспособления к различному профилю и различной несущей способности грунтов и для их перемещения по направляющим опорные элементы выполнены автономными и снабжены индивидуальными двигателями».
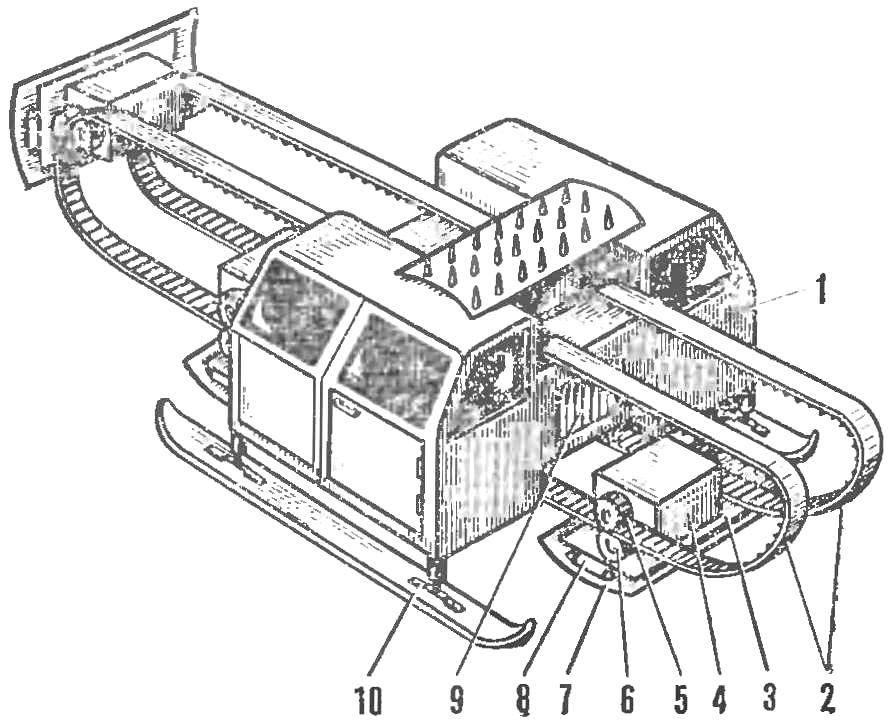
Рис. 1. Вездеход-скалолаз:
1 — кабина-лаборатория; 2 — зубчатые направляющие, жестко закрепленные на корпусе; 3 — траковый движитель; 4 — электродвигатель с редуктором; 5 — ведущие зубчатые катки; 6 — прижимные катки, 7 — опорный башмак; 8 — рессоры; 9 — дизель-электрический агрегат (или аккумуляторы); 10 — боковые поддерживающие лыжи.
Вам не верится, что эта идея и есть принцип построения универсального движителя, способного лазить по горам, пробираться через болота, прыгать, ползать и плавать? Тогда (не смотрите пока на картинки, чтобы не сковывать своего воображения) попробуйте заменить им движитель любой машины, ноги любого живого существа. Каждый раз замена у нac получится!
Я даже не подозревал о такой универсальности: от идеи до авторского свидетельства прошло 5 лет. В течение двух лет обдумывались пути технической реализации. И были cor,.нения: где, кроме моих горных ледников, и кому еще нужна такая супермашина, сверхвездеход, движущийся оттого, что по корпусу ползают маленькие самоходные механизмы, заменившие простейшие железки — траки гусеницы? И не одна (хотя можно обойтись и одной, но тогда будет прерывистое или толчкообразное движение), а много. Правда, это сложнее, если иметь в виду трак как опорный элемент. Но машина в целом проще. Потому что состоит из множества одинаковых, взаимозаменяемых автономных механизмов, а не из целого комплекса жестко связанных друг с другом, сложных и разнообразных: трансмиссии, движители, подвески движителя.
Такая машина в целом будет и надежнее. По той же причине: автономные опорные элементы работают самостоятельно, выход из строя одного из них почти незаметен — надежность ансамбля параллельных элементов увеличивается с ростом числа элементов и стремится к единице, даже если надежность одного из них близка к нулю А траки обычной гусеницы соединены последовательно, и разрыв хотя бы в одном месте ведет к выходу из строп всей цепи. Надежность такого движителя обратно пропорциональна: она стремится к нулю при увеличении числа звеньев, даже если надежность одного звена близка к единице. Поэтому гусеничная цепь не может быть слишком длинной даже теоретически.
Итак, новая машина в целом станет надежней и проще. Причем проще и в изготовлении. Ведь достаточно отработать как следует конструкцию одной тележки — самоходного элемента — и потом можно монтировать их в любом количестве и на любом устройстве взаимодействия с поверхностью или средой; пластинами, надувными подушками, захватами, понтонами, лопастями — на корпуса самоходных машин любых размеров. Это, несомненно, проще, чем каждый раз разрабатывать и строить новую специализированную машину.
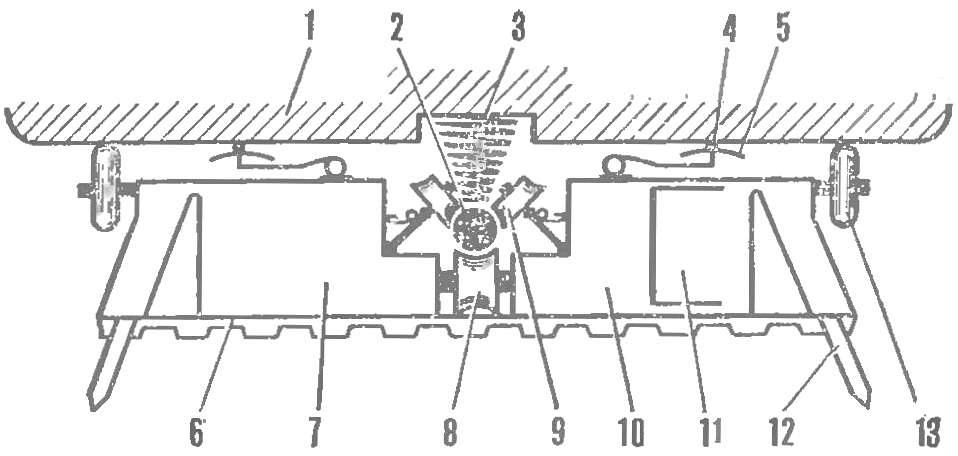
Рис. 2. Опорный элемент:
1 — корпус вездехода 2 — упругая направляющая; 3 — амортизатор подвески направляющей; 4 — шины токопроводов; 5 — скользящие токосъемники; 6 — опорный башмак; 7 — электродвигатель; 8 — ведущий каток; 9 — прижимные катки с пружинами; 10 — корпус редуктора-вариатора; 11 — блок дистанционного управления трак-мотором; 12 — забуриваемые штыри, удерживающие трак на вертикальной трассе, 13 — боковые поддерживающие катки.
Траковый движитель можно ставить на любой объект, пусть самый громоздкий; потребуются лишь направляющие необходимой длины и нужное количество самоходных тележек — и передвигать эти объекты куда выгоднее! Какие объекты? Платформы с буровыми вышками через болота и тундру; связки труб нефте- и газопроводов, фермы мостов, дома, наконец, корабли зимой — не ломая лед, а по льду! Это очень важное преимущество нового движителя, сулящее при современных масштабад. освоения Сибири и Севера огромный выигрыш.
Есть и еще одно, важнейшее: автоматическое приспособление к различной несущей поверхности и к всевозможному профилю грунта. В простейшем случае это свойство выражается в том, что в зависимости от характера грунта и распределения неровностей под нижней, рабочей частью направляющих автономные опорные элементы могут автоматически расставляться на разных расстояниях друг от друга, а в опоре и перемещении транспортного средства может использоваться различное их число.
Реализуется это свойство предельно просто, за счет зависимости скорости движения опорных элементов по направляющим от нагрузки на их двигатели: больше нагрузка меньше скорость, н наоборот. Например, при движении по неровной поверхности опорные элементы будут быстро проскакивать впадины, ямы и упираться в бугры, выступы, камни, продвигая машину вперед.
Где это свойство тракового движителя — приспосабливаемость к неровностям, выраженная в таком простейшем виде, может сказаться решающей? Гам, где этих неровностей больше. Сфера применения таких машин громадна, и прежде всего — горы.
Это практически последняя «не покорившаяся» еще человеку поверхность Земли. До сих пор нет техники, способной пройти по горному бездорожью, через каменные россыпи, снега, льды, скалы, озера, горные реки. Альпинист с крюком, молотком и веревкой — вот единственное «транспортное средство» в настоящих горах. А профессия альпиниста-рабочего сейчас становится массовой: отряды таких специалистов созданы на строительствах Нурекской, Саянской, Ингурской ГЭС. На Токтогульской гидроэлектростанции их отряд насчитывает более 500 человек. Это им в первую очередь нужен горный вездеход-скалолаз.
Новый движитель позволяет создать такую машину. Для этого у него есть все возможности.
Его опорные элементы сами выбирают себе площадку контакта с неровностями пути, что, однако, не исключает возможности управляемого выбора. Они остаются неподвижными относительно поверхности пути до тех пор, пока весь корпус не пройдет над ними. Наличие же двигателей на опорных элементах позволяет установить различные захваты, присоски, виброштыри, которые закрепляют траки на поверхности и намертво держат всю среднюю часть вездехода даже на скальной стенке с отрицательными уклонами У такого движителя при перемещении корпуса на один шаг переносится только один опорный элемент, а не большинство, как обычно у шагающих и лазающих устройств и существ. Это обеспечивает ему безопасность и экономичность.
Такой вездеход может быть длинным и гибким, чтобы совершать повороты, будучи закрепленным. При этом корпус машины может состоять из отдельных коротких отсеков, способных поворачиваться относительно друг друга в горизонтальной и вертикальной плоскости, например, с помощью силовых гидроцилиндров.
На рисунках 2 и 3 показаны опорный элемент и схемы преодоления таким змее- или гусеницеподобным механизмом наиболее труднопроходимых элементов горного рельефа.
Очевидно, чем больше длина такого транспорта, тем выше его скорость, проходимость, безопасность движения и рентабельность.
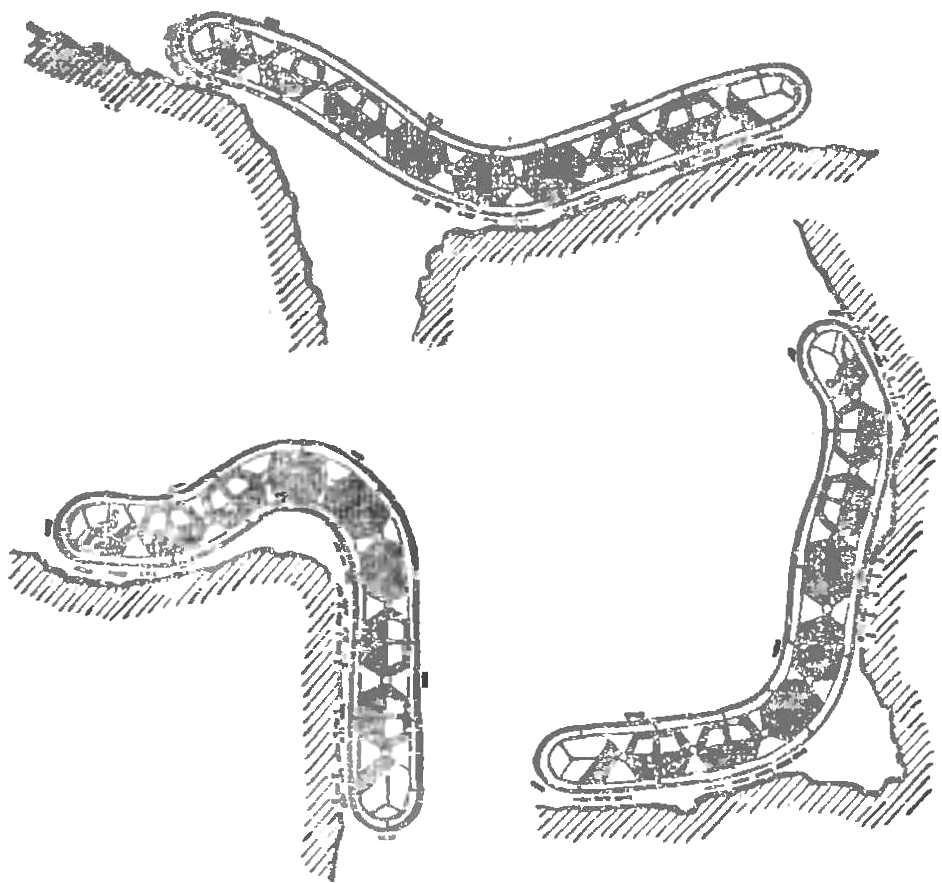
Рис. 3. Схема прохождения вездеходом горных трасс.
Подобный лазающий вездеход облегчит строительство в горах, ускорит освоение высокогорных территорий и, быть может, полностью изменит всю транспортную схему перевозок в этих районах.
Но для начального применения тракового движителя лазающий горный вездеход сложен. Это уже дальняя цель, перспектива. К ней можно идти постепенно, приобретая опыт, решая все более сложные задачи.
Самая первая ступень — машина с одним жестким движителем, то есть имеющая жесткие направляющие, расположенные по продольной оси корпуса: установленные на них опорные элементы в виде тележек с электромоторами, обжимными фрикционными или зубчатыми катками и устройствами взаимодействия с поверхностью в виде пластин с шипами. Поворот осуществляется с помощью расположенных по углам машины боковых поддерживающих колес или лыж.
Эскизный проект (рис. 1) и аналогичная действующая модель такой машины были разработаны для сугубо конкретной цели: перемещения исследовательской лаборатории по поверхности горных ледников. Но постепенно, по мере знакомства с проектом и моделью все большего числа людей, выяснилось, что даже такая, самая простая машина с траковым движителем нужна не только гляциологам, исследователям ледников.
Юрий Георгиевич Арутюнов, директор Эльбрусской географической станции МГУ, ведущий научную работу по проблеме рационального освоения горных территорий, сам мастер спорта по альпинизму, считает, что такая машина в сочетании со второй строящейся очередью канатной дороги «Азау-Кругозор» позволила бы организовать привлекательный туристский маршрут по восхождению на Эльбрус с севера. Сменное аккумуляторное питание, бесшумная работа электромоторов, отсутствие лязгающих гусениц обеспечивали бы туристам высокий комфорт, поездка позволила бы всем желающим увидеть неповторимую панораму Кавказских гор и пейзажи Эльбруса.
Юрий Георгиевич высказал и другую идею: такие машины, преодолевающие по снегу уклоны в 20—30°, могли бы с успехом заменить канатные дороги для подъема горнолыжников, особенно на вновь осваиваемых склонах, где целесообразность строительства подъемника не всегда очевидна.
Л. СУХАНОВ, инженер
Рекомендуем почитать
 ЛЕТОМ — НА МОТОЦИКЛЕ, ЗИМОЙ — НА ВЕЗДЕХОДЕ
ЛЕТОМ — НА МОТОЦИКЛЕ, ЗИМОЙ — НА ВЕЗДЕХОДЕ
ездит учитель Иван Исакович Классен. Таких, как он, в народе называют мастерами на все руки. Кумир местных мальчишек, он, по их мнению, может все: «оживить» неисправный автомобиль,... ГИДРОСАМОЛЕТ Ш-2
ГИДРОСАМОЛЕТ Ш-2
ГИДРОСАМОЛЕТ Ш-2. Масштаб модели 1:33. В России в конце 20-х годов прошлого века возникла насущная необходимость в малой авиации для связи с удаленными объектами хозяйства. Особенно...