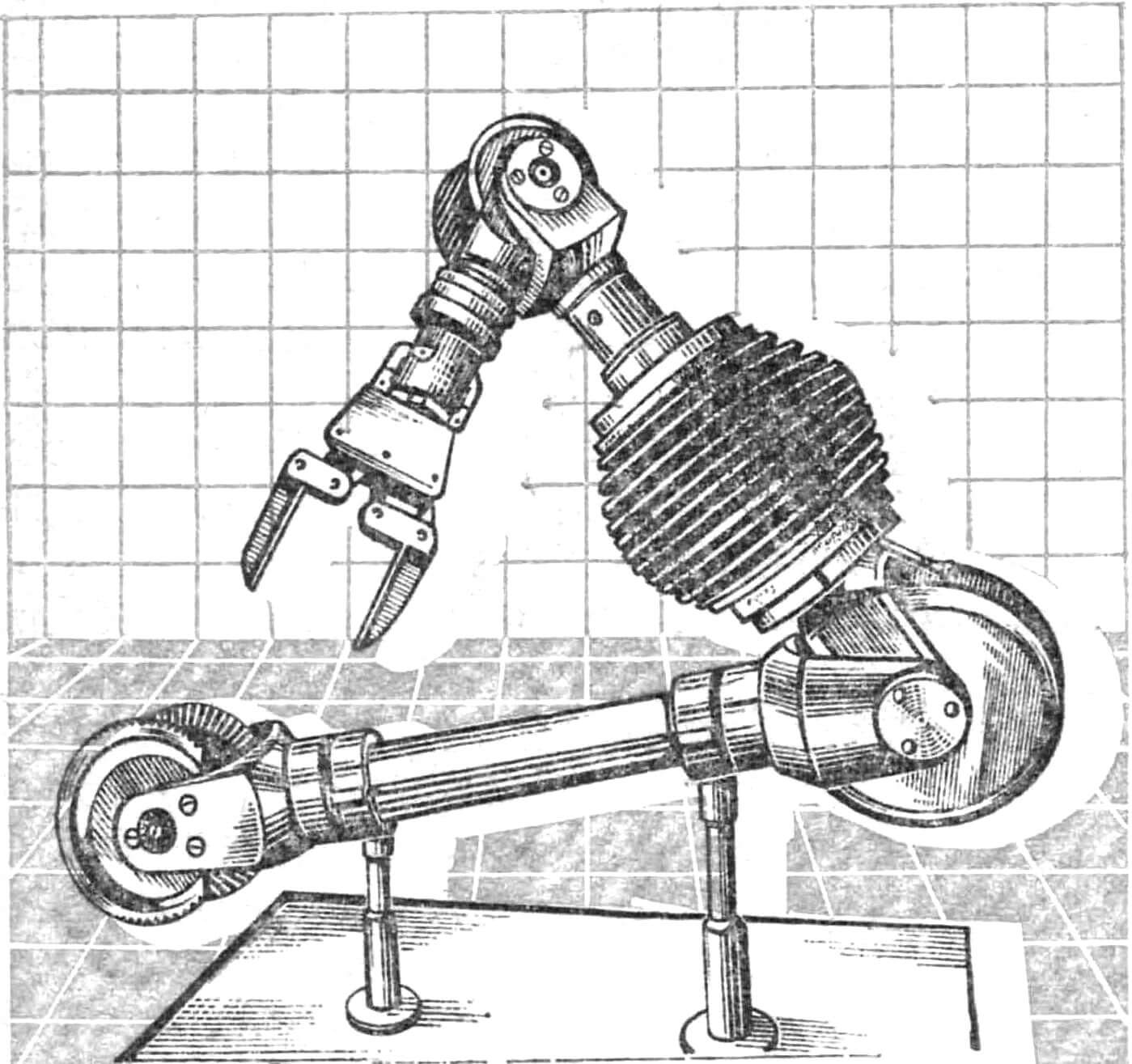
Оригинальная механическая рука для устройств робототехники разработана молодыми изобретателями А. Кузьминым, В. Пузановым и И. Славновым. Основные технические решения конструкции получили авторские свидетельства. Рука может служить исполнительным органом манипуляторов, используемых на объектах со шлюзовыми камерами в зонах, опасных или недоступных для человека.
На одном из звеньев механической руки предусмотрен своеобразный «нарукавник» — герметизирующая оболочка с каналом внутри, связывающим ее с источником создания избыточного давления. Раздуваясь, оболочка срабатывает как пробка, запирая входное отверстие шлюзовой камеры после введения в нее манипулятора. Это упрощает герметизацию шлюзового люка, обеспечивая новые возможности для более оперативного выполнения широкого круга операций непосредственно через этот люк. Например, заменять рабочие инструменты механической руки — всевозможные схваты, гайковерты и другие — или вводить дополнительные компоненты и объекты для работы манипулятором. Становится также доступным при необходимости быстро отремонтировать и сам манипулятор.
Механическая рука может работать с объектами весом до 5 кг.
Рекомендуем почитать
 ТРОФЕЙНЫЕ ТАНКИ В КРАСНОЙ АРМИИ
ТРОФЕЙНЫЕ ТАНКИ В КРАСНОЙ АРМИИ
Использование в Красной Армии трофейных германских танков (как, впрочем, и в вермахте советских) началось с первых дней Великой Отечественной войны. Так, уже 27 июня 1941 года, в самом... ЭЛЕКТРОГИТАРА «ПИККОЛО»
ЭЛЕКТРОГИТАРА «ПИККОЛО»
Получившая широкое распространение электрогитара унаследовала строй от своей предшественницы — шестиструнной испанской гитары. При этом самая высокая нота, которую можно взять на...